欢迎大家点赞、收藏、关注、评论啦 ,由于篇幅有限,只展示了部分核心代码。 技术交流认准下方 CSDN 官方提供的联系方式
概要
根据太阳与地球的相对运动规律和赤道坐标系和地平坐标系下太阳相对于地球的运动轨道,以应用价值为前提,提出了以步进电机为驱动机构的开环跟踪控制策略,并设计了相应的控制系统。根据控制系统的要求,本文选用了AT89C51RC单片机作为核心部件,完成了单片机的外围硬件电路设计和相应的软件设计。文中详细介绍了系统硬件电路中的重要器件及其实现的功能,设计了相应的硬件接口电路,主要包括复位电路,I2C串行通信电路和步进电机驱动电路,并以软件流程图的形式详细说明了本文的软件设计思想。
关键词: 太阳能热发电;太阳跟踪;单片机;开环跟踪
一、设计的主要内容
由于太阳相对于聚光器的位置时刻都在改变,这就要求聚光器不断改变自身的方位,实时保持太阳处于太阳能聚光器的主光轴上,即始终对准太阳,以有限的接收面积捕获尽可能多的太阳辐射能。要保持太阳始终处于聚光器的主光轴上,就必须采用跟踪系统。本论文将设计和开发一套用于太阳能热发电的跟踪控制系统。
论文设计的主要内容包括硬件设计和软件设计两部分。
硬件部分:
① 复位电路。
② I2C通信电路,包括外围总线、键盘显示芯片和日历时钟芯片的连接。
③ 步进电机模块电路,包括反向驱动器,步进电机驱动器的连接。
④ 绘制系统的总体电路图。
软件系统包括:
① 系统总设计流程图及其程序。
② I2C通信模块软件设计,包括I2C总线连接图,初始化流程图,按键处理流程图和时间调整流程图及程序。
③ 步进电机的软件设计,包括计算模块流程图和步进电机模块流程图。
二、硬件电路设计
2.1跟踪控制方案的选择
2.1.1跟踪系统坐标系的选择
在太阳能热发电系统中,支架不仅要支撑起聚光器,还要支撑起安置在聚光器焦点位置的一台数吨重的发动机。如果采用极轴坐标系统,虽然跟踪的方式简单,但是聚光器的重量并不通过极轴轴线,极轴支撑装置的设计难度大。所以本设计不采用极轴坐标系统。
对于较大的系统,工程上常采用地平坐标系统。采用地平坐标系统的一个特殊优点是重力平面保持在通过收集器的垂直平面内,这样把收集器表面的重力偏差减到最小,就可以使收集器及其支架的工程设计的复杂性简化到最低限度,收集器的轴和轴承所受的力矩也减到最小。故采用地平坐标系统的收集器支撑结构比较简单。
2.1.2跟踪方式及跟踪系统的选择
跟踪控制方式分为闭环跟踪、开环跟踪和混合跟踪控制方式三种。
闭环跟踪和开环跟踪控制方式的主要区别是有无反馈信息。混合跟踪控制方式将闭环跟踪和开环跟踪相结合的跟踪控制方式,混合跟踪控制方式。混合跟踪方式有闭环跟踪方式的优点也同样具备开环方式的优点。如果采用高性能的传感器用于光电跟踪模块,无疑将大大提高跟踪系统的造价,这是在工业生产中所不愿看到的;如果采用普通的传感器,则跟踪系统会存在的缺点为反应慢、精度差、稳定性低,且闭环跟踪无法适用多云天气。根据当地的经度纬度,日期和时间,采用开环控制方式,通过数学上对太阳轨道的计算,得到下一时刻收集器的位置。这样可以通过电动驱动收集器,保持太阳始终处于收集器的主光轴上。按轨道跟踪太阳,不受天气限制。如此一来也存在一个缺点是时间长了,系统的累积误差的影响越来越大,跟踪效果会明显下降。
因为步进电机只有周期性的误差而无累积误差,所以步进电机在非超载的情况下,其转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响。因此,采用步进电机作为跟踪系统的执行机构,可有效控制系统的累积误差。
本论文控制方式采用开环的程序控制,分别对太阳高度角和方位角进行二维跟踪,执行机构采用步进电机。
2.2系统总体设计及相关硬件介绍
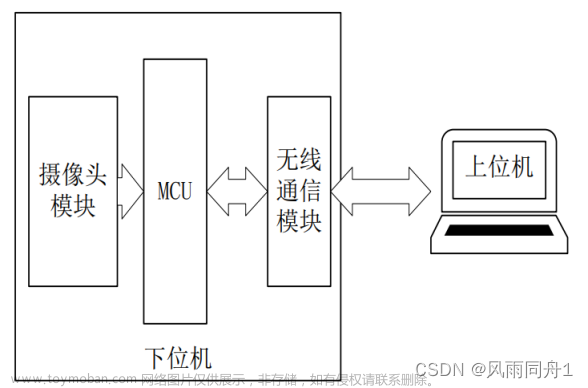
系统示意图如图2-l所示,单片机是控制系统的核心,键盘显示芯片作为键盘指令输入和相关数据显示的驱动器管理着键盘和显示器,日历时钟芯片为系统提供了一个准确的时钟作为时间标准;步进电机驱动器间接控制着步进电机。相关硬件接口电路主要包括复位电路,I2C通信电路和步进电机模块电路。本文将对所选用的单片机以及主要硬件电路展开说明。
图2-1 系统示意图
综合考虑本系统对单片机功能的要求,本文选用美国ATMEL公司的AT89C51RC单片机,该单片机具有以下特性:
AT89C51RC是在AT89C52基础上开发的新型单片机。它的主要特性是:
●片内含有32KB的Flash程序存储器,擦写周期为1000次;
●片内数据存储器内含512字节的RAM;
●具有可编程32线I/O口(P0,P1,P2和P3);
●具有3个可编程定时器TO,T1和T2;
●中断系统是具有8个中断源、6个中断矢量、2级中断优先权的中断结构;
●具有一个全双工UART串行口;
●低功耗工作方式为空闲模式和掉电模式;
●具有双数据指针DPTR0和DPTRl;
●具有3级程序锁定位;
●具有硬件看门狗定时器WDT;
●AT89C5 1 RC工作电源为4.0-5.5V;
●AT89C5lRC最高工作频率为33MHz;
●具有断电标志POF。
AT89C51RC单片机PDIP封装的引脚排列如图2-2所示。
图2-2 AT89C51RC引脚图
三、软件设计
3.1系统主程序设计
本控制系统软件设计的主程序流程如图3-1所示,主要分为I2C串行通信模块、角度计算模块和步进电机模块。

图3-1 主程序流程图
原理图

源程序清单
附录2 源程序清单
主程序:
#include“reg52.h”
#include“VI2C_C5 I.H” / /包含VI2C软件包
#include“zlg7290.h”
#include“fgangel.h”
#include“motorun.h”
#include“manregstep.h”
#include<math.h>
#define PCF8563 0xA2
#define WRADDR 0x00
#define RDADDR 0x02
#define settime l
#define setdata 2
#define setlongitude 3
#define tran 4
#define up 5
#define down 6
#define left 7
#define ok 8
#define uint unsigned int
#define uchar unsigned char
sbit KEY_ INT=P3^2;
sbit RST=P1^2;
unsigned char disp_buf[8]={0,0,0,0,0,0,0,0};
unsigned char KEY;
float *fg;
bit switch date=0;
bit longtpn;
struct longitude
{
uint longtitudehour;,
uchar longtitudemin;
uchar longtitudesec;
};
struct time
{
uchar hour;
uchar min;
uchar see;
}idata lconvtime;
struct longitude idata Lloc={116,28,0};
unsigned char loncontime(struct longitude idata*Lstal,struct longitude idata*LLloc);
···································
if(KEY==setdata) //is setdam?
{
IRcvStr(PCF8563,RDADDR,rd,Ox7);//读现在的时、分、秒
display_date(rd+3);
disp butl2]2disp_buf[2]&0x7f;
disp_butf[4]=disp_butl4]&0x7f;
while(1)
{
disp_buf[i]=disp_buf[i]10x40;//E1个位首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);
if(KEY_INT-==0)
{
KEY=ZLG7290_GetKey0;
if(KEY==up)//加l
{
disp_buf[i]=disp_butIi]+1;
if((disp_buf[i]&OxOf)= 10)
{
disp_butIi]2disp_butli]&0x40;
}
}
if(KEY==down)
{
disp_buf[i]=disp_buf[i]-l;
if((disp_buf[i]&OxOf)==OxOF)
{
disp_butIi]=0x49;
}
}
If(KEY'==left)
{
disp_buf[i]=disp__buf[i]&0XBF;//stop flash
i=i+l;
if(i>5)
{
ZLG7290_sendBuf(&disp_buf[0],8);
i=0;
}
}
if(KEY==ok)//确认
{
disp_butli]=disp_butf[i]&0XBF;//stop flash
ZLG7290_SendBuf(&disp_buf[i],1);
tdl[0]=disp_buf[1]*1 6+(disp_butl0]&0XOF);
tdl[1]=dispbuf[3]*16+disp_butl2];
tdl[2]=disp_buf[5]*16+disp_buf[4];
ISendStr(PCF8563,WRADDR+5,tdl,0x1);
ISendStr(PCF8563,WRADDR+7,&tdl[1],ox2);
i=0:
break;
}
}
}
}
····································
if(KEY=setlongitude)//is longitude?
{
display_longimde(Lloc);
while(1)
{
disp_buf[i]=disp buif[i] 0x40;//秒首先闪烁
ZLG7290_ SendBuf(&disp_buf[0],i+1);
if(KEY_INT==0)
{
KEY=ZLG7290_ GetKeY0;
if(KEY==up)//加l
{
disp_buf[i]=disp_butli]+l;
if((disp_buf[i]&0x0f)==10)
{
disp bur[i]=disp_buf[i]&0x40;
}
}
if(KEY= down)
{
disp_bul[i]=disp butli]-l;
if((disp_buflil&OxOf)==OxOF)
{
disp_buf[i]=0x49;
}
}
if(KEY=left)
{
disp_but[i]=disp_buf[i]&0XBF;//stop flash
i=i+l;
if(i>6)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=0:
}
}
if(KEY=ok)//确认
{
Disp_buf[i]=disp_buf[i]&0XBF;//Stop flash
Lloc.Iongtitudesec=disp_butf[l]*10+disp_buf[0];
Lloc.1ongtitudemin=disp_butf[3]*10+disp_buf[2];
Lloc.longtitudehour=disp_buf[6]*100+disp_buf[5]*10+disp_buf[4];
i=0:
break;
}
}
}
}
// 设置纬度
····································
if(KEY=etlatitude)//is set latimde?
{
display_latitude(1atitude);
while(1)
{
disp_buf[i]=disp_buf[i] 0x40;//秒首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);
If(KEY_INT==0)
{
KEY =ZLG7290_GetKeY0;
if(KEY==up)//加l
{
disp_butf[i]=disp_buf[i]+l;
if((disp_buf[i]&0xof)=l0)
{
disp_buf[i]=disp_buf[i]&0x40;
}
}
if(KEY==down)
{
disp_buf[i]=disp_butf[i]+1;
if((disp_buf[i]&OxOf)=20x0F)
{
disp_buf[i]=0x49;
}
}
If(KEY=left)
{
disp_buf[i]=disp_buf[i]&OXBF;//stop flash
i=i+l;
if(i>5)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=O;
}
}
If(KEY==6)//确认
{
disp_buf[i]=disp_butIi]&0XBF;//stop flash
latitude[2]=disp_buf[1]*10+disp_buf[0];
latitude[1]=disp_butl3]*10+disp_but[2];
latitude[0]=disp_buf[5]*10+disp_butl4];
i=0;
break;
}
}
}
}
·时间调整子程序
····································
if(KEY= =settime) //is settime?
{
IRcvStr(PCF8563,RDADDR,rd,0x3);//读现在的时、分、秒
display_timeset(rd);
while(1)
{
disp_buf[i]=disp_buf[i]0x40;//秒首先闪烁
ZLG7290_SendBuf(&disp_butl0],i+1);
if(KEY_INT= =0)
{
KEY=ZLG7290_GetKeY();
If(KEY= =up)//加1
{
disp_buf[i]=disp_butf[i]+1;
if((disp_but[i]&0x0f)= = 10)
{
disp_buf[i]=disp_buf[i]&0x40;
}
}
If(KEY= =down)
{
disp_buf[i]=disp_butIi]-1;
if((disp_buf[i]&0x0f)= =0x0F)
{
disp_bufIi]=0x49;
}
}
If(KEY==left)
{
disp_buf[i]=disp_buf[i]&0XBF;//stop flash
i=i+l:
if(i>7)
{
ZLG7290_SendBuf(&disp_buf[0],8);
i=0;
}
}
if(KEY==ok)//确认
{
disp_buf[i]=disp_buf[i]&0XBF;//stop flash
ZLG7290_SendBuf(&disp_buf[i],1);
tdl[0]=disp_buf[1]*16+(disp_butl0]&0XOF);
tdl[1]=disp_butf[4]*16+disp_buf[3];
tdl[2]=disp_buf[7]*16+disp_buf[6];
ISendStr(PCF8563,WRADDR+2,td l,0x3);
i=0;
break;
}
}
}
}
}
四、结论
本设计开发了以AT89C51RC为核心的硬件控制电路,硬件接口电路主要包括复位电路,I2C串行通信电路和步进电机驱动电路;同时进行了软件部分的设计,由以上软硬件构成的控制系统,实现了在地平坐标系下对太阳的二维跟踪。
本课题研究方向的一些展望:
1.采用步进电机驱动聚光器转动虽可有效控制累积误差,但也存在电能消耗多和负载增大时(如大风天气)容易出现丢步等问题。采用直流电机作为动力机械,通过开环闭环相结合的控制方式消除系统累积误差的跟踪方式更具前景,但’反应速度快,精度高的光电传感器造价高,跟踪系统成本的控制依赖于低成本,高性能的光电传感器的研制和开发。
2.考虑到太阳能跟踪控制系统的实际应用环境(多为沙漠地区)的恶劣,提高控制电路的抗干扰性势在必行。随着电子技术的发展,提高元器件及芯片性能和系统组成的模块化程度,是控制领域发展的大趋势。文章来源:https://www.toymoban.com/news/detail-733780.html
五、 文章目录
目 录
摘要 I
Abstract II
1 绪论 1
1.1课题背景及意义 1
1.1.1太阳能热发电技术是最有前途的可再生能源发电方式 1
1.1.2几种主要太阳能热发电方式的前景 2
1.2我国的太阳能资源 3
1.3国内外现状 4
1.4本论文设计的主要内容 5
2 系统硬件的设计 6
2.1跟踪控制方案的选择 6
2.1.1跟踪系统坐标系的选择 6
2.1.2跟踪方式及跟踪系统的选择 6
2.2系统总体设计及相关硬件介绍 7
2.2.1复位电路的硬件设计 9
2.2.2 I2C通信模块 10
2.2.3步进电机模块 14
2.3本章小结 15
3 软件设计 17
3.1 I2C串行通信简介及其软件设计 19
3.1.1 I2C总线设计 19
3.2.2 I2C总线连接器件的设计 21
3.2步进电机模块的软件设计 27
3.3本章小结 27
4 结 论 30
参考文献 31
致谢 32
附录 33
附录1:原理图 33
附录2:程序 34文章来源地址https://www.toymoban.com/news/detail-733780.html
到了这里,关于基于单片机的太阳跟踪系统的设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!