之前写过VGA,其实HDMI也写过,但是没记笔记。
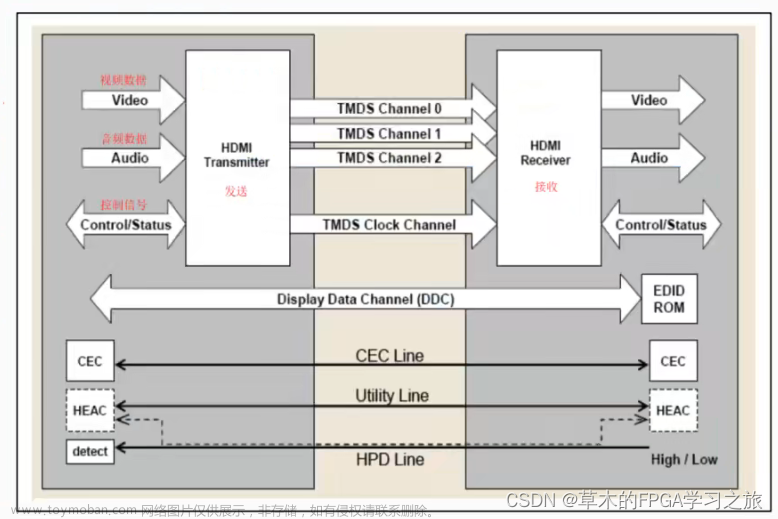
HDMI 是新一代的多媒体接口标准,英文全称是 High-Definition Multimedia Interface,即高清多媒体接 口。它能够同时传输视频和音频,简化了设备的接口和连线;同时提供了更高的数据传输带宽,可以传输 无压缩的数字音频及高分辨率视频信号。HDMI 1.0 版本于 2002 年发布,最高数据传输速度为 5Gbps;而 2017 年发布的 HDMI 2.1 标准的理论带宽可达 48Gbps。 HDMI 向下兼容 DVI,但是 DVI(数字视频接口)只能用来传输视频,而不能同时传输音频,这是两者最主要的差别。此外,DVI 接口的尺寸明显大于 HDMI 接口。
TMDS(Transition Minimized Differential Signaling,最小化传输差分信号)是美国 Silicon Image 公司开发的一项高速数据传输技术,在 DVI 和 HDMI 视频接口中使用差分信号传输高速串行数据。DVI 和 HDMI 接口协议在物理层使用 TMDS 标准传输音视频数据。
VGA时序

VGA Signal Timing (tinyvga.com)
介绍



规范:


小结:
VGA像素编码以后通过差分对端口以十倍像素时钟的速率地串行发送,就是HDMI协议(或者说DVI)。
我们通过VGA实现HDMI协议需要把其中输出的数据做:
1.Encode
2.Oserdese2
3.Obufds
分别对应:编码,并行转串行,差分输出。
官方例程
HDMI编码器
来自xaap460的编码器
//
//
// Xilinx, Inc. 2008 www.xilinx.com
//
//
//
// File name : encode.v
//
// Description : TMDS encoder
//
// Date - revision : Jan. 2008 - v 1.0
//
// Author : Bob Feng
//
// Disclaimer: LIMITED WARRANTY AND DISCLAMER. These designs are
// provided to you "as is". Xilinx and its licensors make and you
// receive no warranties or conditions, express, implied,
// statutory or otherwise, and Xilinx specifically disclaims any
// implied warranties of merchantability, non-infringement,or
// fitness for a particular purpose. Xilinx does not warrant that
// the functions contained in these designs will meet your
// requirements, or that the operation of these designs will be
// uninterrupted or error free, or that defects in the Designs
// will be corrected. Furthermore, Xilinx does not warrantor
// make any representations regarding use or the results of the
// use of the designs in terms of correctness, accuracy,
// reliability, or otherwise.
//
// LIMITATION OF LIABILITY. In no event will Xilinx or its
// licensors be liable for any loss of data, lost profits,cost
// or procurement of substitute goods or services, or for any
// special, incidental, consequential, or indirect damages
// arising from the use or operation of the designs or
// accompanying documentation, however caused and on any theory
// of liability. This limitation will apply even if Xilinx
// has been advised of the possibility of such damage. This
// limitation shall apply not-withstanding the failure of the
// essential purpose of any limited remedies herein.
//
// Copyright � 2006 Xilinx, Inc.
// All rights reserved
//
//
`timescale 1 ps / 1ps
module encode (
input clkin, // pixel clock input
input rstin, // async. reset input (active high)
input [7:0] din, // data inputs: expect registered
input c0, // c0 input
input c1, // c1 input
input de, // de input
output reg [9:0] dout // data outputs
);
// Counting number of 1s and 0s for each incoming pixel
// component. Pipe line the result.
// Register Data Input so it matches the pipe lined adder
// output
reg [3:0] n1d; //number of 1s in din
reg [7:0] din_q;
always @ (posedge clkin) begin
n1d <=#1 din[0] + din[1] + din[2] + din[3] + din[4] + din[5] + din[6] + din[7];
din_q <=#1 din;
end
///
// Stage 1: 8 bit -> 9 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
///
wire decision1;
assign decision1 = (n1d > 4'h4) | ((n1d == 4'h4) & (din_q[0] == 1'b0));
/*
reg [8:0] q_m;
always @ (posedge clkin) begin
q_m[0] <=#1 din_q[0];
q_m[1] <=#1 (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);
q_m[2] <=#1 (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);
q_m[3] <=#1 (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);
q_m[4] <=#1 (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);
q_m[5] <=#1 (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);
q_m[6] <=#1 (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);
q_m[7] <=#1 (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);
q_m[8] <=#1 (decision1) ? 1'b0 : 1'b1;
end
*/
wire [8:0] q_m;
assign q_m[0] = din_q[0];
assign q_m[1] = (decision1) ? (q_m[0] ^~ din_q[1]) : (q_m[0] ^ din_q[1]);
assign q_m[2] = (decision1) ? (q_m[1] ^~ din_q[2]) : (q_m[1] ^ din_q[2]);
assign q_m[3] = (decision1) ? (q_m[2] ^~ din_q[3]) : (q_m[2] ^ din_q[3]);
assign q_m[4] = (decision1) ? (q_m[3] ^~ din_q[4]) : (q_m[3] ^ din_q[4]);
assign q_m[5] = (decision1) ? (q_m[4] ^~ din_q[5]) : (q_m[4] ^ din_q[5]);
assign q_m[6] = (decision1) ? (q_m[5] ^~ din_q[6]) : (q_m[5] ^ din_q[6]);
assign q_m[7] = (decision1) ? (q_m[6] ^~ din_q[7]) : (q_m[6] ^ din_q[7]);
assign q_m[8] = (decision1) ? 1'b0 : 1'b1;
/
// Stage 2: 9 bit -> 10 bit
// Refer to DVI 1.0 Specification, page 29, Figure 3-5
/
reg [3:0] n1q_m, n0q_m; // number of 1s and 0s for q_m
always @ (posedge clkin) begin
n1q_m <=#1 q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7];
n0q_m <=#1 4'h8 - (q_m[0] + q_m[1] + q_m[2] + q_m[3] + q_m[4] + q_m[5] + q_m[6] + q_m[7]);
end
parameter CTRLTOKEN0 = 10'b1101010100;
parameter CTRLTOKEN1 = 10'b0010101011;
parameter CTRLTOKEN2 = 10'b0101010100;
parameter CTRLTOKEN3 = 10'b1010101011;
reg [4:0] cnt; //disparity counter, MSB is the sign bit
wire decision2, decision3;
assign decision2 = (cnt == 5'h0) | (n1q_m == n0q_m);
/
// [(cnt > 0) and (N1q_m > N0q_m)] or [(cnt < 0) and (N0q_m > N1q_m)]
/
assign decision3 = (~cnt[4] & (n1q_m > n0q_m)) | (cnt[4] & (n0q_m > n1q_m));
// pipe line alignment
reg de_q, de_reg;
reg c0_q, c1_q;
reg c0_reg, c1_reg;
reg [8:0] q_m_reg;
always @ (posedge clkin) begin
de_q <=#1 de;
de_reg <=#1 de_q;
c0_q <=#1 c0;
c0_reg <=#1 c0_q;
c1_q <=#1 c1;
c1_reg <=#1 c1_q;
q_m_reg <=#1 q_m;
end
///
// 10-bit out
// disparity counter
///
always @ (posedge clkin or posedge rstin) begin
if(rstin) begin
dout <= 10'h0;
cnt <= 5'h0;
end else begin
if (de_reg) begin
if(decision2) begin
dout[9] <=#1 ~q_m_reg[8];
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 (q_m_reg[8]) ? q_m_reg[7:0] : ~q_m_reg[7:0];
cnt <=#1 (~q_m_reg[8]) ? (cnt + n0q_m - n1q_m) : (cnt + n1q_m - n0q_m);
end else begin
if(decision3) begin
dout[9] <=#1 1'b1;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 ~q_m_reg;
cnt <=#1 cnt + {q_m_reg[8], 1'b0} + (n0q_m - n1q_m);
end else begin
dout[9] <=#1 1'b0;
dout[8] <=#1 q_m_reg[8];
dout[7:0] <=#1 q_m_reg[7:0];
cnt <=#1 cnt - {~q_m_reg[8], 1'b0} + (n1q_m - n0q_m);
end
end
end else begin
case ({c1_reg, c0_reg})
2'b00: dout <=#1 CTRLTOKEN0;
2'b01: dout <=#1 CTRLTOKEN1;
2'b10: dout <=#1 CTRLTOKEN2;
default: dout <=#1 CTRLTOKEN3;
endcase
cnt <=#1 5'h0;
end
end
end
endmodule
串转并
//
//
// Xilinx, Inc. 2007 www.xilinx.com
//
//
//
// File name : serdes_4b_10to1.v
//
// Description : 4-bit transmitter macro for Spartan 3A (uses ODDR2)
// Takes in 30 bits and serialises this to 4 bits DDR (4th bit is a regenerated clock)
//
// data is transmitted LSBs first
// 0, 3, 6, 9, 12, 15, 18, 21, 24, 27 - data
// 1, 4, 7, 10, 13, 16, 19, 22, 25, 28 - data
// 2, 5, 8, 11, 14, 17, 20, 23, 26, 29 - data
// 0, 0, 0, 0, 0, 1, 1, 1, 1, 1 - clock
//
//
// Author : Bob Feng
// Disclaimer: LIMITED WARRANTY AND DISCLAMER. These designs are
// provided to you "as is". Xilinx and its licensors make, and you
// receive no warranties or conditions, express, implied,
// statutory or otherwise, and Xilinx specifically disclaims any
// implied warranties of merchantability, non-infringement, or
// fitness for a particular purpose. Xilinx does not warrant that
// the functions contained in these designs will meet your
// requirements, or that the operation of these designs will be
// uninterrupted or error free, or that defects in the Designs
// will be corrected. Furthermore, Xilinx does not warrant or
// make any representations regarding use or the results of the
// use of the designs in terms of correctness, accuracy,
// reliability, or otherwise.
//
// LIMITATION OF LIABILITY. In no event will Xilinx or its
// licensors be liable for any loss of data, lost profits, cost
// or procurement of substitute goods or services, or for any
// special, incidental, consequential, or indirect damages
// arising from the use or operation of the designs or
// accompanying documentation, however caused and on any theory
// of liability. This limitation will apply even if Xilinx
// has been advised of the possibility of such damage. This
// limitation shall apply not-withstanding the failure of the
// essential purpose of any limited remedies herein.
//
// Copyright � 2007 Xilinx, Inc.
// All rights reserved
//
//
`timescale 1ns/1ps
module serdes_4b_10to1 (
input clk, // clock input
input clkx5, // 5x clock input
input clkx5not,
input [29:0] datain, // input data for serialisation
input rst, // reset
output [7:0] dataout) ; // out DDR data and clock
wire [4:0] syncp; // internal sync signals for rising edges
wire [4:0] syncn; // internal sync signals for falling edges
reg [3:0] p_mux; // muxes (+ve)
reg [3:0] n_mux; // muxes (-ve)
wire [29:0] dataint;
wire [29:0] db;
wire [3:0] wa; // RAM read address
reg [3:0] wa_d; // RAM read address
wire [3:0] ra; // RAM read address
reg [3:0] ra_d; // RAM read address
// Here we instantiate a 16x30 Dual Port RAM
// and fill first it with data aligned to
// clk domain
parameter ADDR0 = 4'b0000;
parameter ADDR1 = 4'b0001;
parameter ADDR2 = 4'b0010;
parameter ADDR3 = 4'b0011;
parameter ADDR4 = 4'b0100;
parameter ADDR5 = 4'b0101;
parameter ADDR6 = 4'b0110;
parameter ADDR7 = 4'b0111;
parameter ADDR8 = 4'b1000;
parameter ADDR9 = 4'b1001;
parameter ADDR10 = 4'b1010;
parameter ADDR11 = 4'b1011;
parameter ADDR12 = 4'b1100;
parameter ADDR13 = 4'b1101;
parameter ADDR14 = 4'b1110;
parameter ADDR15 = 4'b1111;
always@(wa) begin
case (wa)
ADDR0 : wa_d = ADDR1 ;
ADDR1 : wa_d = ADDR2 ;
ADDR2 : wa_d = ADDR3 ;
ADDR3 : wa_d = ADDR4 ;
ADDR4 : wa_d = ADDR5 ;
ADDR5 : wa_d = ADDR6 ;
ADDR6 : wa_d = ADDR7 ;
ADDR7 : wa_d = ADDR8 ;
ADDR8 : wa_d = ADDR9 ;
ADDR9 : wa_d = ADDR10;
ADDR10 : wa_d = ADDR11;
ADDR11 : wa_d = ADDR12;
ADDR12 : wa_d = ADDR13;
ADDR13 : wa_d = ADDR14;
ADDR14 : wa_d = ADDR15;
default : wa_d = ADDR0;
endcase
end
FDC fdc_wa0 (.C(clk), .D(wa_d[0]), .CLR(rst), .Q(wa[0]));
FDC fdc_wa1 (.C(clk), .D(wa_d[1]), .CLR(rst), .Q(wa[1]));
FDC fdc_wa2 (.C(clk), .D(wa_d[2]), .CLR(rst), .Q(wa[2]));
FDC fdc_wa3 (.C(clk), .D(wa_d[3]), .CLR(rst), .Q(wa[3]));
//Dual Port fifo to bridge data through
DRAM16XN #(.data_width(30))
fifo_u (
.DATA_IN(datain),
.ADDRESS(wa),
.ADDRESS_DP(ra),
.WRITE_EN(1'b1),
.CLK(clk),
.O_DATA_OUT(),
.O_DATA_OUT_DP(dataint));
/
// Here starts clk5x domain for fifo read out
// FIFO read is set to be once every 5 cycles of clk5x in order
// to keep up pace with the fifo write speed
// Also FIFO read reset is delayed a bit in order to avoid
// underflow.
/
always@(ra) begin
case (ra)
ADDR0 : ra_d = ADDR1 ;
ADDR1 : ra_d = ADDR2 ;
ADDR2 : ra_d = ADDR3 ;
ADDR3 : ra_d = ADDR4 ;
ADDR4 : ra_d = ADDR5 ;
ADDR5 : ra_d = ADDR6 ;
ADDR6 : ra_d = ADDR7 ;
ADDR7 : ra_d = ADDR8 ;
ADDR8 : ra_d = ADDR9 ;
ADDR9 : ra_d = ADDR10;
ADDR10 : ra_d = ADDR11;
ADDR11 : ra_d = ADDR12;
ADDR12 : ra_d = ADDR13;
ADDR13 : ra_d = ADDR14;
ADDR14 : ra_d = ADDR15;
default : ra_d = ADDR0;
endcase
end
wire rstsync, rstsync_q, rstp, rstn;
(* ASYNC_REG = "TRUE" *) FDP fdp_rst (.C(clkx5), .D(rst), .PRE(rst), .Q(rstsync));
FD fd_rstsync (.C(clkx5), .D(rstsync), .Q(rstsync_q));
FD fd_rstp (.C(clkx5), .D(rstsync_q), .Q(rstp));
FDRE fdc_ra0 (.C(clkx5), .D(ra_d[0]), .R(rstp), .CE(syncp[4]), .Q(ra[0]));
FDRE fdc_ra1 (.C(clkx5), .D(ra_d[1]), .R(rstp), .CE(syncp[4]), .Q(ra[1]));
FDRE fdc_ra2 (.C(clkx5), .D(ra_d[2]), .R(rstp), .CE(syncp[4]), .Q(ra[2]));
FDRE fdc_ra3 (.C(clkx5), .D(ra_d[3]), .R(rstp), .CE(syncp[4]), .Q(ra[3]));
//
// 5 Cycle Counter for clkx5
// Generate data latch and bit mux timing
//
wire [2:0] statep, staten;
reg [2:0] statep_d, staten_d;
parameter ST0 = 3'b000;
parameter ST1 = 3'b001;
parameter ST2 = 3'b011;
parameter ST3 = 3'b111;
parameter ST4 = 3'b110;
always@(statep) begin
case (statep)
ST0 : statep_d = ST1 ;
ST1 : statep_d = ST2 ;
ST2 : statep_d = ST3 ;
ST3 : statep_d = ST4 ;
default : statep_d = ST0;
endcase
end
FDR fdc_stp0 (.C(clkx5), .D(statep_d[0]), .R(rstp), .Q(statep[0]));
FDR fdc_stp1 (.C(clkx5), .D(statep_d[1]), .R(rstp), .Q(statep[1]));
FDR fdc_stp2 (.C(clkx5), .D(statep_d[2]), .R(rstp), .Q(statep[2]));
wire [4:0] syncp_d;
assign syncp_d[0] = (statep == ST0);
assign syncp_d[1] = (statep == ST1);
assign syncp_d[2] = (statep == ST2);
assign syncp_d[3] = (statep == ST3);
assign syncp_d[4] = (statep == ST4);
FD fd_syncp0 (.C(clkx5), .D(syncp_d[0]), .Q(syncp[0]));
FD fd_syncp1 (.C(clkx5), .D(syncp_d[1]), .Q(syncp[1]));
FD fd_syncp2 (.C(clkx5), .D(syncp_d[2]), .Q(syncp[2]));
FD fd_syncp3 (.C(clkx5), .D(syncp_d[3]), .Q(syncp[3]));
FD fd_syncp4 (.C(clkx5), .D(syncp_d[4]), .Q(syncp[4]));
//
// 5 Cycle Counter for clkx5not
// Generate data latch and bit mux timing
//
FD fd_rstn (.C(clkx5not), .D(rstsync_q), .Q(rstn));
always@(staten) begin
case (staten)
ST0 : staten_d = ST1 ;
ST1 : staten_d = ST2 ;
ST2 : staten_d = ST3 ;
ST3 : staten_d = ST4 ;
default : staten_d = ST0;
endcase
end
FDR fdc_stn0 (.C(clkx5not), .D(staten_d[0]), .R(rstn), .Q(staten[0]));
FDR fdc_stn1 (.C(clkx5not), .D(staten_d[1]), .R(rstn), .Q(staten[1]));
FDR fdc_stn2 (.C(clkx5not), .D(staten_d[2]), .R(rstn), .Q(staten[2]));
wire [4:0] syncn_d;
assign syncn_d[0] = (staten == ST0);
assign syncn_d[1] = (staten == ST1);
assign syncn_d[2] = (staten == ST2);
assign syncn_d[3] = (staten == ST3);
assign syncn_d[4] = (staten == ST4);
FD fd_syncn0 (.C(clkx5not), .D(syncn_d[0]), .Q(syncn[0]));
FD fd_syncn1 (.C(clkx5not), .D(syncn_d[1]), .Q(syncn[1]));
FD fd_syncn2 (.C(clkx5not), .D(syncn_d[2]), .Q(syncn[2]));
FD fd_syncn3 (.C(clkx5not), .D(syncn_d[3]), .Q(syncn[3]));
FD fd_syncn4 (.C(clkx5not), .D(syncn_d[4]), .Q(syncn[4]));
// Latch data out of FIFO
// clkx5 setup time: 5 cycles since syncp[4] is used as CE
// clkx5not setup time: 4.5 cycles since syncn[4] is used as CE
// syncn[4] is set to be 0.5 cycle earlier than syncp[4]
FDE fd_db0 (.C(clkx5not), .D(dataint[0]), .CE(syncn[4]), .Q(db[0]));
FDE fd_db1 (.C(clkx5not), .D(dataint[1]), .CE(syncn[4]), .Q(db[1]));
FDE fd_db2 (.C(clkx5not), .D(dataint[2]), .CE(syncn[4]), .Q(db[2]));
FDE fd_db3 (.C(clkx5), .D(dataint[3]), .CE(syncp[4]), .Q(db[3]));
FDE fd_db4 (.C(clkx5), .D(dataint[4]), .CE(syncp[4]), .Q(db[4]));
FDE fd_db5 (.C(clkx5), .D(dataint[5]), .CE(syncp[4]), .Q(db[5]));
FDE fd_db6 (.C(clkx5not), .D(dataint[6]), .CE(syncn[4]), .Q(db[6]));
FDE fd_db7 (.C(clkx5not), .D(dataint[7]), .CE(syncn[4]), .Q(db[7]));
FDE fd_db8 (.C(clkx5not), .D(dataint[8]), .CE(syncn[4]), .Q(db[8]));
FDE fd_db9 (.C(clkx5), .D(dataint[9]), .CE(syncp[4]), .Q(db[9]));
FDE fd_db10(.C(clkx5), .D(dataint[10]), .CE(syncp[4]), .Q(db[10]));
FDE fd_db11(.C(clkx5), .D(dataint[11]), .CE(syncp[4]), .Q(db[11]));
FDE fd_db12(.C(clkx5not), .D(dataint[12]), .CE(syncn[4]), .Q(db[12]));
FDE fd_db13(.C(clkx5not), .D(dataint[13]), .CE(syncn[4]), .Q(db[13]));
FDE fd_db14(.C(clkx5not), .D(dataint[14]), .CE(syncn[4]), .Q(db[14]));
FDE fd_db15(.C(clkx5), .D(dataint[15]), .CE(syncp[4]), .Q(db[15]));
FDE fd_db16(.C(clkx5), .D(dataint[16]), .CE(syncp[4]), .Q(db[16]));
FDE fd_db17(.C(clkx5), .D(dataint[17]), .CE(syncp[4]), .Q(db[17]));
FDE fd_db18(.C(clkx5not), .D(dataint[18]), .CE(syncn[4]), .Q(db[18]));
FDE fd_db19(.C(clkx5not), .D(dataint[19]), .CE(syncn[4]), .Q(db[19]));
FDE fd_db20(.C(clkx5not), .D(dataint[20]), .CE(syncn[4]), .Q(db[20]));
FDE fd_db21(.C(clkx5), .D(dataint[21]), .CE(syncp[4]), .Q(db[21]));
FDE fd_db22(.C(clkx5), .D(dataint[22]), .CE(syncp[4]), .Q(db[22]));
FDE fd_db23(.C(clkx5), .D(dataint[23]), .CE(syncp[4]), .Q(db[23]));
FDE fd_db24(.C(clkx5not), .D(dataint[24]), .CE(syncn[4]), .Q(db[24]));
FDE fd_db25(.C(clkx5not), .D(dataint[25]), .CE(syncn[4]), .Q(db[25]));
FDE fd_db26(.C(clkx5not), .D(dataint[26]), .CE(syncn[4]), .Q(db[26]));
FDE fd_db27(.C(clkx5), .D(dataint[27]), .CE(syncp[4]), .Q(db[27]));
FDE fd_db28(.C(clkx5), .D(dataint[28]), .CE(syncp[4]), .Q(db[28]));
FDE fd_db29(.C(clkx5), .D(dataint[29]), .CE(syncp[4]), .Q(db[29]));
//
// Data OUT Multiplexers: clk5x and clk5xnot
//
always @ (*)
begin
casex (1'b1) // synthesis parallel_case full_case
syncn[0]: begin
n_mux[0] = db[0];
n_mux[1] = db[1];
n_mux[2] = db[2];
n_mux[3] = 1'b0;
end
syncn[1]: begin
n_mux[0] = db[6];
n_mux[1] = db[7];
n_mux[2] = db[8];
n_mux[3] = 1'b0;
end
syncn[2]: begin
n_mux[0] = db[12];
n_mux[1] = db[13];
n_mux[2] = db[14];
n_mux[3] = 1'b0;
end
syncn[3]: begin
n_mux[0] = db[18];
n_mux[1] = db[19];
n_mux[2] = db[20];
n_mux[3] = 1'b1;
end
syncn[4]: begin
n_mux[0] = db[24];
n_mux[1] = db[25];
n_mux[2] = db[26];
n_mux[3] = 1'b1;
end
endcase
end
FD muxn0(.D(n_mux[0]), .C(clkx5not), .Q(dataout[4])) ;
FD muxn1(.D(n_mux[1]), .C(clkx5not), .Q(dataout[5])) ;
FD muxn2(.D(n_mux[2]), .C(clkx5not), .Q(dataout[6])) ;
FD muxn3(.D(n_mux[3]), .C(clkx5not), .Q(dataout[7])) ;
always @ (*)
begin
casex (1'b1) // synthesis parallel_case full_case
syncp[0]: begin
p_mux[0] = db[3];
p_mux[1] = db[4];
p_mux[2] = db[5];
p_mux[3] = 1'b0;
end
syncp[1]: begin
p_mux[0] = db[9];
p_mux[1] = db[10];
p_mux[2] = db[11];
p_mux[3] = 1'b0;
end
syncp[2]: begin
p_mux[0] = db[15];
p_mux[1] = db[16];
p_mux[2] = db[17];
p_mux[3] = 1'b1;
end
syncp[3]: begin
p_mux[0] = db[21];
p_mux[1] = db[22];
p_mux[2] = db[23];
p_mux[3] = 1'b1;
end
syncp[4]: begin
p_mux[0] = db[27];
p_mux[1] = db[28];
p_mux[2] = db[29];
p_mux[3] = 1'b1;
end
endcase
end
FD muxp0(.D(p_mux[0]), .C(clkx5), .Q(dataout[0])) ;
FD muxp1(.D(p_mux[1]), .C(clkx5), .Q(dataout[1])) ;
FD muxp2(.D(p_mux[2]), .C(clkx5), .Q(dataout[2])) ;
FD muxp3(.D(p_mux[3]), .C(clkx5), .Q(dataout[3])) ;
endmodule
原语OSERDESE2
两个OSERDESE2的串联方法
 文章来源:https://www.toymoban.com/news/detail-734036.html
文章来源:https://www.toymoban.com/news/detail-734036.html
 文章来源地址https://www.toymoban.com/news/detail-734036.html
文章来源地址https://www.toymoban.com/news/detail-734036.html
OSERDESE2_Master (
.CLK (serial_clk_5x), // 串行数据时钟,5倍时钟频率
.CLKDIV (paralell_clk), // 并行数据时钟
.RST (reset), // 1-bit input: Reset
.OCE (1'b1), // 1-bit input: Output data clock enable
.OQ (serial_data_out), // 串行输出数据
.D1 (paralell_data[0]), // D1 - D8: 并行数据输入
.D2 (paralell_data[1]),
.D3 (paralell_data[2]),
.D4 (paralell_data[3]),
.D5 (paralell_data[4]),
.D6 (paralell_data[5]),
.D7 (paralell_data[6]),
.D8 (paralell_data[7]),
.SHIFTIN1 (cascade1), // SHIFTIN1 用于位宽扩展
.SHIFTIN2 (cascade2), // SHIFTIN2
.SHIFTOUT1 (), // SHIFTOUT1: 用于位宽扩展
.SHIFTOUT2 (), // SHIFTOUT2
.OFB (), // 以下是未使用信号
.T1 (1'b0),
.T2 (1'b0),
.T3 (1'b0),
.T4 (1'b0),
.TBYTEIN (1'b0),
.TCE (1'b0),
.TBYTEOUT (),
.TFB (),
.TQ ()
);
//例化OSERDESE2原语,实现并串转换,Slave模式
OSERDESE2 #(
.DATA_RATE_OQ ("DDR"), // 设置双倍数据速率
.DATA_RATE_TQ ("SDR"), // DDR, BUF, SDR
.DATA_WIDTH (10), // 输入的并行数据宽度为10bit
.SERDES_MODE ("SLAVE"), // 设置为Slave,用于10bit宽度扩展
.TBYTE_CTL ("FALSE"), // Enable tristate byte operation (FALSE, TRUE)
.TBYTE_SRC ("FALSE"), // Tristate byte source (FALSE, TRUE)
.TRISTATE_WIDTH (1) // 3-state converter width (1,4)
)
OSERDESE2_Slave (
.CLK (serial_clk_5x), // 串行数据时钟,5倍时钟频率
.CLKDIV (paralell_clk), // 并行数据时钟
.RST (reset), // 1-bit input: Reset
.OCE (1'b1), // 1-bit input: Output data clock enable
.OQ (), // 串行输出数据
.D1 (1'b0), // D1 - D8: 并行数据输入
.D2 (1'b0),
.D3 (paralell_data[8]),
.D4 (paralell_data[9]),
.D5 (1'b0),
.D6 (1'b0),
.D7 (1'b0),
.D8 (1'b0),
.SHIFTIN1 (), // SHIFTIN1 用于位宽扩展
.SHIFTIN2 (), // SHIFTIN2
.SHIFTOUT1 (cascade1), // SHIFTOUT1: 用于位宽扩展
.SHIFTOUT2 (cascade2), // SHIFTOUT2
.OFB (), // 以下是未使用信号
.T1 (1'b0),
.T2 (1'b0),
.T3 (1'b0),
.T4 (1'b0),
.TBYTEIN (1'b0),
.TCE (1'b0),
.TBYTEOUT (),
.TFB (),
.TQ ()
); 原语OBUFDS
用例
//
//
// Xilinx, Inc. 2007 www.xilinx.com
//
// XAPP xyz
//
//
//
// File name : dvi_encoder.v
//
// Description : dvi_encoder
//
// Date - revision : Feb. 2008 - 1.0.0
//
// Author : Bob Feng
//
// Disclaimer: LIMITED WARRANTY AND DISCLAMER. These designs are
// provided to you "as is". Xilinx and its licensors makeand you
// receive no warranties or conditions, express, implied,
// statutory or otherwise, and Xilinx specificallydisclaims any
// implied warranties of merchantability, non-infringement,or
// fitness for a particular purpose. Xilinx does notwarrant that
// the functions contained in these designs will meet your
// requirements, or that the operation of these designswill be
// uninterrupted or error free, or that defects in theDesigns
// will be corrected. Furthermore, Xilinx does not warrantor
// make any representations regarding use or the results ofthe
// use of the designs in terms of correctness, accuracy,
// reliability, or otherwise.
//
// LIMITATION OF LIABILITY. In no event will Xilinx or its
// licensors be liable for any loss of data, lost profits,cost
// or procurement of substitute goods or services, or forany
// special, incidental, consequential, or indirect damages
// arising from the use or operation of the designs or
// accompanying documentation, however caused and on anytheory
// of liability. This limitation will apply even if Xilinx
// has been advised of the possibility of such damage. This
// limitation shall apply not-withstanding the failure ofthe
// essential purpose of any limited remedies herein.
//
// Copyright � 2004 Xilinx, Inc.
// All rights reserved
//
//
`timescale 1 ps / 1ps
module dvi_encoder # (
parameter SDATAINVERT = "FALSE" //Invert or not SDATA before serilize it
)(
input clkin, // system clock
input clkx5in, // system clock x5
input clkx5notin, // system clock x5 not
input rstin, // reset
input [7:0] blue_din, // Blue data in
input [7:0] green_din, // Green data in
input [7:0] red_din, // Red data in
input hsync, // hsync data
input vsync, // vsync data
input de, // data enable
output [7:0] tmds_data) ; // data outputs to ddr in IOB, bit 3(and 7) is clock
wire [9:0] red ;
wire [9:0] green ;
wire [9:0] blue ;
wire [29:0] s_data ;
encode encb (
.clkin (clkin),
.rstin (rstin),
.din (blue_din),
.c0 (hsync),
.c1 (vsync),
.de (de),
.dout (blue)) ;
encode encr (
.clkin (clkin),
.rstin (rstin),
.din (green_din),
.c0 (1'b0),
.c1 (1'b0),
.de (de),
.dout (green)) ;
encode encg (
.clkin (clkin),
.rstin (rstin),
.din (red_din),
.c0 (1'b0),
.c1 (1'b0),
.de (de),
.dout (red)) ;
assign s_data = {red[9], green[9], blue[9], red[8], green[8], blue[8],
red[7], green[7], blue[7], red[6], green[6], blue[6],
red[5], green[5], blue[5], red[4], green[4], blue[4],
red[3], green[3], blue[3], red[2], green[2], blue[2],
red[1], green[1], blue[1], red[0], green[0], blue[0]} ;
reg [29:0] s_data_q;
always @ (posedge clkin) begin
if(SDATAINVERT == "TRUE")
s_data_q <= ~s_data;
else
s_data_q <= s_data;
end
serdes_4b_10to1 serialise (
.clk (clkin),
.clkx5 (clkx5in),
.clkx5not (clkx5notin),
.datain (s_data_q),
.rst (rstin),
.dataout (tmds_data)) ;
endmodule
到了这里,关于Hdmi接口与XAPP460的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!








![[桌面运维]PC常用的视频接口,显示器VGA、DVI、HDMI、DP、USB-C接口的认识和应用](https://imgs.yssmx.com/Uploads/2024/02/731510-1.gif)



