1.xacro简介
URDF文件不具备代码复用的特性(在上一篇文章也能发现,其实左右轮是极其相似的但还是要单独描述),一个复杂的机器人模型会拥有大量了的传感器和关节组件,这时候使用URDF文件就太难阅读了。精简化、可复用、模块化的xacro文件来了。
1.优势:
·精简模型代码:xacro是一个精简版本的URDF文件,在xacro中可以通过宏定义来复用代码(这就跟c语言和python一样模块化)。
·提供可编程接口:xacro语法支持可编程接口,包括常量、变量、数学公式等。
使用xacro文件需要在<robot>标签中添加xacro的声名

2.xacro文件常用语法
1.使用常量定义
·定义:<xacro:property name="PI" value="3.14"/>
·调用:<origin xyz="0 0 0" rpy="${PI/2} 0 0">
2.调用数学公式
·在"${}"中,可以调用数学公式,包括加、减、乘、除等
·<origin xyz="0 ${(motor_length+wheel_length)/2} 0" rpy="0 0 0"/>
·数学公式是浮点数计算
3.宏定义(这里我是引用书籍的)
定义支撑柱:
调用的时候只需要输入参数:
<mrobot_standoff_2in parent="base_link" number="4" x_loc="${standoff_x/2}" y__loc="${standoff_y}" z_loc="${plate_height/2}">

4. xacro文件引用

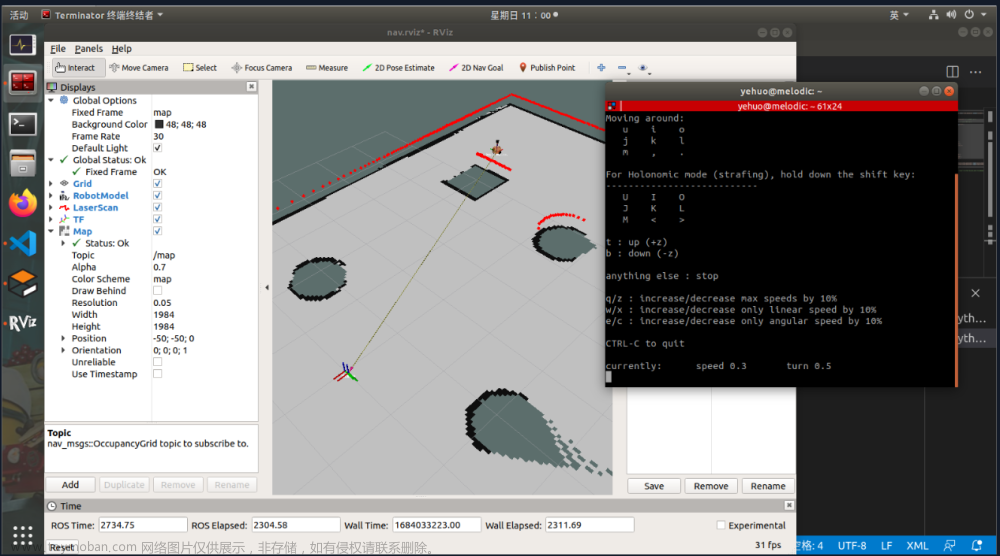
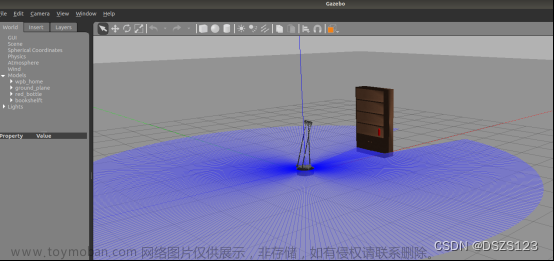
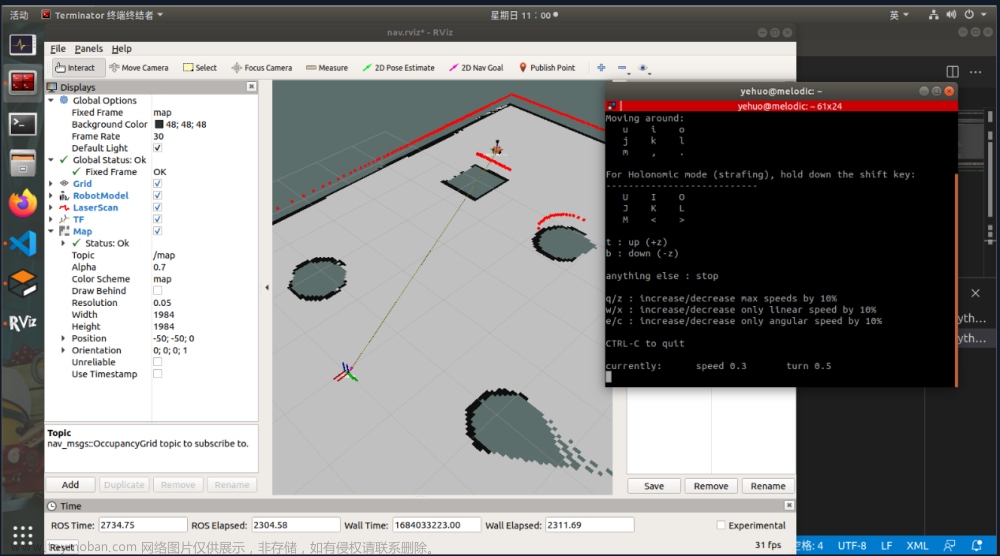
2.添加传感器
Gazebo - Docs: Sensors (gazebosim.org)文章来源:https://www.toymoban.com/news/detail-736128.html
在gazebo官方的教程中有大量的传感器部署可以让我们去参考,后续会大量参考官方的文档。文章来源地址https://www.toymoban.com/news/detail-736128.html
到了这里,关于机器人仿真-gazebo学习笔记(4)xacro和传感器添加的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!