无人机路径规划算法在无人机领域具有重要的应用价值,可以帮助无人机在复杂的环境中高效、安全地完成任务。本文将介绍基于 MATLAB 的多种无人机路径规划算法,并提供相应的源代码。
一、无人机路径规划简介
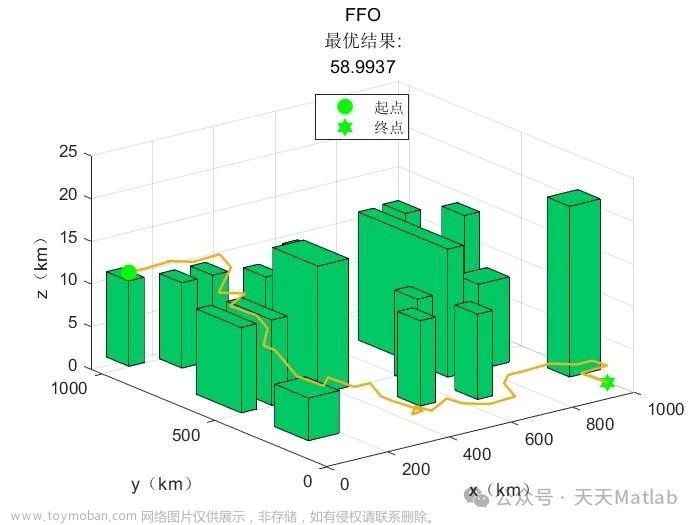
无人机路径规划是指在给定的环境中,通过算法确定无人机的航路,使其能够在不发生碰撞的情况下到达目标点。路径规划算法的目标是找到一条最优或次优路径,以满足任务需求,同时考虑因素如障碍物避免、航路长度和时间成本等。文章来源:https://www.toymoban.com/news/detail-736263.html
二、基于 MATLAB 的无人机路径规划算法文章来源地址https://www.toymoban.com/news/detail-736263.html
- A* 算法
A* 算法是一种基于图搜索的路径规划算法,它通过维护一个开放列表和一个关闭列表来搜索最优路径。该算法综合考虑了启发式评估函数和实际代价函数,以找到最短路径。下面是 A* 算法的 MATLAB 实现代码:
function path = AStar(start, goal, obstacles)
openList = PriorityQueue()到了这里,关于无人机路径规划算法在无人机领域具有重要的应用价值,可以帮助无人机在复杂的环境中高效、安全地完成任务的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!