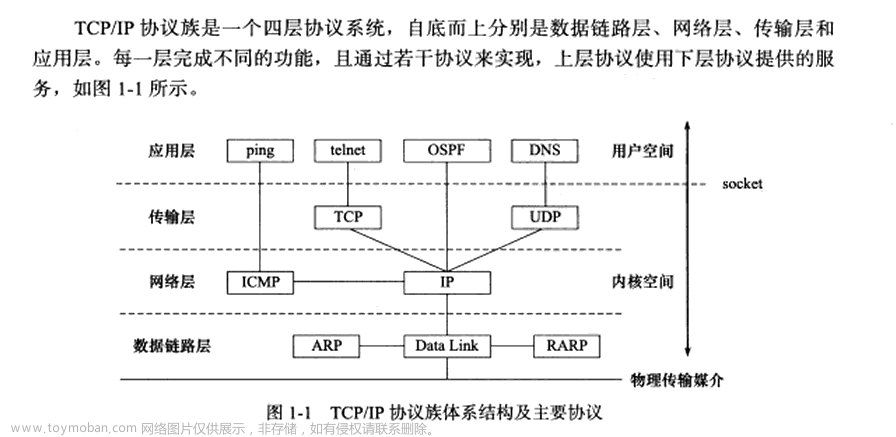
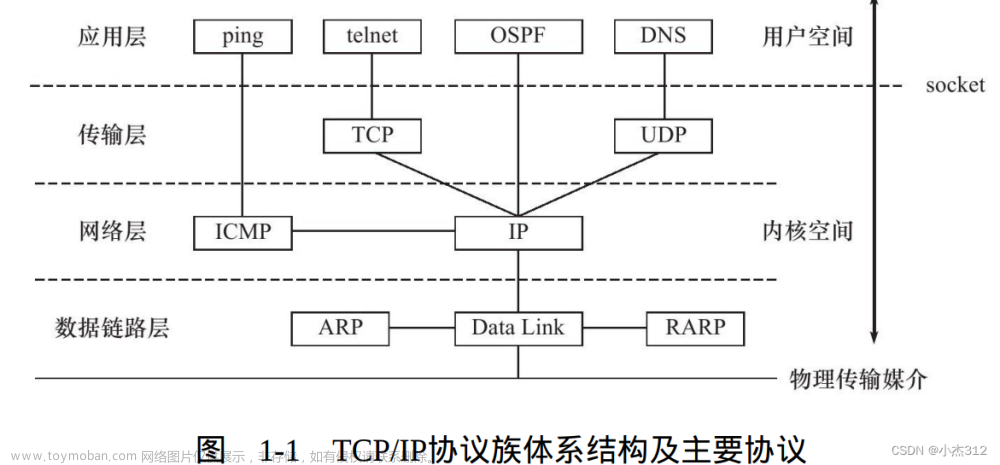
第10章 信号
信号是由用户、系统或者进程发送给目标进程的信息,以通知目标进程某个状态的改变或系统异常。
10.1 Linux信号概述
:::tips
int kill(pid_t pid, int sig);
:::
kill函数:一个进程给其他进程发送信号的API。
sig一般大于0,如果设为0则表示不发送信号,可以用来检测进程或进程组是否存在。由于进程PID的回绕(当进程被启动的时候,系统将按照顺序选择下一个没有被使用的数字作为它的PID(2~32768),当数字已经回绕一圈的时候,新的PID重新从2开始),可能导致被检测的PID不是我们期望的;另一方面,这种检测方法不是原子操作。
:::tips
typedef void (*__sighandler_t) (int);
:::
信号处理函数是可重入的,避免引发竞态条件。
如果程序在执行处于阻塞状态的系统调用时接收到信号,并且为该信号设置了信号处理函数,则默认情况下系统调用将被中断,并且errno被设置为EINTR。
10.2 信号函数
:::tips
_sighandler_t signal(int sig, _sighandler_t _handler);
:::
signal函数:为一个信号设置处理函数。
:::tips
int sigaction(int sig, const struct sigaction* act, struct sigaction* oact);
:::
sigaction函数:设置信号处理函数的更健壮的接口。可以为信号设置标志来自动重启被该信号中断的系统调用。
信号掩码:指定哪些信号不能发送给本进程。
10.3 信号集
sigset_t实际上是一个长整型数组,数组的每个元索的每个位表示一个信号。与文件描述符集fd_set类似。
:::tips
int sigprocmask(Int _how, _const sigset_t * _set, sigset_t* _oset);
:::
sigprocmask函数:设置或查看进程的信号掩码。
:::tips
int sigpending(sigset_t* set);
:::
sigpending函数:信号掩码使得被屏蔽的信号不能被进程接收,此时该信号被挂起,通过sigpending函数获得被挂起的信号集。此时通过sigprocmask函数可以使能被挂起的信号。
10.4 统一事件源
信号是一种异步事件:信号处理函数和程序的主循环是两条不同的执行路线。
为了尽快执行信号处理函数,可以把信号的主要处理逻辑放到程序的主循环中。信号处理函数往管道的写端写入信号值,主循环则从管道的读端读出该信号值。使用I/O复用来监听,信号事件就能和其他I/O事件一样被处理,即统一事件源。文章来源:https://www.toymoban.com/news/detail-736365.html
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <assert.h>
#include <stdio.h>
#include <signal.h>
#include <unistd.h>
#include <errno.h>
#include <string.h>
#include <fcntl.h>
#include <stdlib.h>
#include <sys/epoll.h>
#include <pthread.h>
#define MAX_EVENT_NUMBER 1024
static int pipefd[2];
int setnonblocking(int fd)
{
int old_option = fcntl(fd, F_GETFL);
int new_option = old_option | O_NONBLOCK;
fcntl(fd, F_SETFL, new_option);
return old_option;
}
void addfd(int epollfd, int fd)
{
epoll_event event;
event.data.fd = fd;
event.events = EPOLLIN | EPOLLET;
epoll_ctl(epollfd, EPOLL_CTL_ADD, fd, &event);
setnonblocking(fd);
}
/* 信号处理函数 */
void sig_handler(int sig)
{
/* 保留原来的errno, 在函数最后恢复, 以保证函数的可重入性 */
int save_errno = errno;
int msg = sig;
send(pipefd[1], (char *)&msg, 1, 0); /* 将信号写入管道,以通知主循环 */
errno = save_errno;
}
/* 设置信号的处理函数 */
void addsig(int sig)
{
struct sigaction sa;
memset(&sa, '\0', sizeof(sa));
sa.sa_handler = sig_handler;
sa.sa_flags |= SA_RESTART;
sigfillset(&sa.sa_mask);
assert(sigaction(sig, &sa, NULL) != -1);
}
int main(int argc, char *argv[])
{
if (argc <= 2)
{
printf("usage: %s ip_address port_number\n", basename(argv[0]));
return 1;
}
const char *ip = argv[1];
int port = atoi(argv[2]);
int ret = 0;
struct sockaddr_in address;
bzero(&address, sizeof(address));
address.sin_family = AF_INET;
inet_pton(AF_INET, ip, &address.sin_addr);
address.sin_port = htons(port);
int listenfd = socket(PF_INET, SOCK_STREAM, 0);
assert(listenfd > 0);
ret = bind(listenfd, (struct sockaddr *)&address, sizeof(address));
assert(ret != -1);
ret = listen(listenfd, 5);
assert(ret != -1);
epoll_event events[MAX_EVENT_NUMBER];
int epollfd = epoll_create(5);
assert(epollfd != -1);
addfd(epollfd, listenfd);
/* 使用socketpair创建管道,注册pipefd[0]上的可读事件 */
ret = socketpair(PF_UNIX, SOCK_STREAM, 0, pipefd);
assert(ret != -1);
setnonblocking(pipefd[1]);
addfd(epollfd, pipefd[0]);
/* 设置一些信号的处理函数 */
addsig(SIGHUP);
addsig(SIGCHLD);
addsig(SIGTERM);
addsig(SIGINT);
bool stop_server = false;
while (!stop_server)
{
int number = epoll_wait(epollfd, events, MAX_EVENT_NUMBER, -1);
if ((number < 0) && (errno != EINTR))
{
printf("epoll failure\n");
break;
}
for (int i = 0; i < number; ++i)
{
int sockfd = events[i].data.fd;
/* 如果就绪的文件描述符是listenfd, 则处理新的连接 */
if (sockfd == listenfd)
{
struct sockaddr_in client_address;
socklen_t client_addrlength = sizeof(client_address);
int sockfd = accept(listenfd, (struct sockaddr *)&client_address,
&client_addrlength);
addfd(epollfd, sockfd);
}
/* 如果就绪的文件描述符是pipefd[0], 则处理信号 */
else if ((sockfd == pipefd[0]) && (events[i].events & EPOLLIN))
{
char signals[1024];
ret = recv(pipefd[0], signals, sizeof(signals), 0);
if (ret == -1)
{
continue;
}
else if (ret == 0)
{
continue;
}
else
{
/* 因为每个信号值占1字节,所以按字节来逐个接收信号,我们以SIGTREM
* 为例,来说明如何安全地终止服务器主循环 */
for (int i = 0; i < ret; ++i)
{
switch(signals[i])
{
case SIGCHLD:
case SIGHUP:
{
continue;
}
case SIGTERM:
case SIGINT:
{
stop_server = true;
}
}
}
}
}
else
{
}
}
}
printf("close fds\n");
close(listenfd);
close(pipefd[1]);
close(pipefd[0]);
return 0;
}
10.5 网络编程相关信号
SIGHUP:当挂起进程的控制终端时,SIGHUP信号将被触发。对于没有控制终端的网络后台程序而言,它们通常利用SIGHUP信号来强制服务器重读配置文件,例如xinetd超级服务程序。
xinetd处理SIGHUP的流程:
1)程序接收到SIGHUP信号时,信号处理函数便用管道通知主程序该信号的到来。信号处理函数往管道的写端写入SIGHUP信号,而主程序使用poll检测到管道的读端上有可读事件,就将管道上的数据读入;
2)xinetd重新读取一个子配置文件;3或4;
3)xinetd给子进程发送SIGTERM信号来终止该子进程,并调用waitpid来等待该子进程结束;(停止echo服务)
4)xinetd启动telnet服务的过程:创建一个流服务 socket 并将其绑定到端口上,然后监听该端口;(开启telnet服务)
SIGPIPE:往一个读端关闭的管道或socket连接中写数据将引发SIGPIPE信号,程序接收到后默认结束进程。以poll为例检测是否关闭:当管道的读端关闭时,写端文件描述符上的POLLHUP事件将被触发;当socket连接被对方关闭时,socket的POLLRDHUP事件将被触发。
SIGURG:内核通知应用程序带外数据到达。另一种方法是I/O复用技术,select等系统调用在接收到带外数据时将返回,并向应用程序报告socket上的异常事件。文章来源地址https://www.toymoban.com/news/detail-736365.html
#include <sys/types.h>
#include <sys/socket.h>
#include <netinet/in.h>
#include <arpa/inet.h>
#include <assert.h>
#include <stdio.h>
#include <unistd.h>
#include <stdlib.h>
#include <errno.h>
#include <string.h>
#include <signal.h>
#include <fcntl.h>
#define BUF_SIZE 1024
static int connfd;
/* SIGURG信号的处理函数 */
void sig_urg(int sig)
{
int save_errno = errno;
char buffer[BUF_SIZE];
memset(buffer, '\0', BUF_SIZE);
int ret = recv(connfd, buffer, BUF_SIZE - 1, MSG_OOB); /* 接收带外数据 */
printf("got %d bytes os oob data '%s'\n", ret, buffer);
errno = save_errno;
}
void addsig(int sig, void (*sig_handler)(int))
{
struct sigaction sa;
memset(&sa, '\0', sizeof(sa));
sa.sa_handler = sig_handler;
sa.sa_flags |= SA_RESTART;
sigfillset(&sa.sa_mask);
assert(sigaction(sig, &sa, NULL) != -1);
}
int main(int argc, char *argv[])
{
if (argc <= 2)
{
printf("usage: %s ip_address port_number \n", basename(argv[0]));
return 1;
}
const char *ip = argv[1];
int port = atoi(argv[2]);
struct sockaddr_in address;
bzero(&address, sizeof(address));
address.sin_family = AF_INET;
inet_pton(AF_INET, ip, &address.sin_addr);
address.sin_port = htons(port);
int sockfd = socket(PF_INET, SOCK_STREAM, 0);
assert(sockfd > 0);
int ret = bind(sockfd, (struct sockaddr *)&address, sizeof(address));
assert(ret != -1);
ret = listen(sockfd, 5);
assert(ret != -1);
struct sockaddr_in client;
socklen_t client_addrlength = sizeof(client);
connfd = accept(sockfd, (struct sockaddr *)&client, &client_addrlength);
if (connfd < 0)
{
printf("errno is : %d\n", errno);
}
else
{
addsig(SIGURG, sig_urg);
/* 使用SIGURG信号之前,我们必须设置socket的宿主进程或进程组 */
fcntl(connfd, F_SETOWN, getpid());
char buffer[BUF_SIZE];
while (1)
{
/* 循环接收普通数据 */
memset(buffer, '\0', BUF_SIZE);
ret = recv(connfd, buffer, BUF_SIZE - 1, 0);
if (ret <= 0)
{
break;
}
printf("get %d bytes of normal data '%s'\n", ret, buffer);
}
close(connfd);
}
close(sockfd);
return 0;
}
到了这里,关于Linux高性能服务器编程——ch10笔记的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!