一、硬件设计
1.直流减速电机
直流减速电机,即齿轮减速电机,是在普通直流电机的基础上,加上配套齿轮减速箱。齿轮减速箱的作用是,提供较低的转速,较大的力矩。
简单的来说,STM32分配两个IO口给一个直流减速电机,并给予高低电平,来使得电机进行正转或反转。

我用的电机为GM25-370直流减速电机(带霍尔编码器),工作电压:6-24VDC,额定电压12V,额定电流0.65A,空载转速350RPM,额定功率5W,最大精度,1496CPR,配备 CPR霍尔AB两相编码器,减速后输出单圈374个正交脉冲。
2.TB6612FNG电机驱动芯片
要实现小车的转向与前进后退控制,我们可以使用STM32实现,但是STM32的IO口带负载能力较弱,而直流电机是大电流感性负载,所以我们需要功率放大器件,在这里,我选择使用TB6612FNG这款电机驱动芯片。
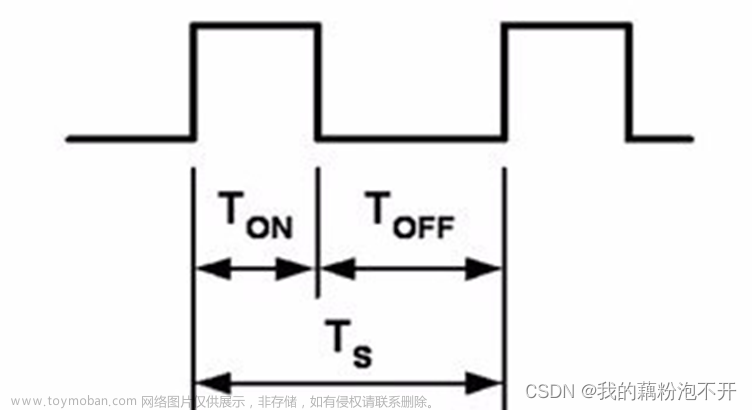
TB6612FNG 是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H 桥结构,双通道电路输出,可同时驱动 2 个电机。相比于 L298N的热耗性和外围二极管续流电路,TB6612FNG无需外加散热片,外围电路简单,只需外接电源滤波电容就可以直接驱动电机,利于减小系统尺寸。对于PWM信号输入频率范围,我采用10KHz的频率,并通过改变占空比调节电机的速度。
平衡小车中使用到的引脚:
电机1——PB12/PB13
电机2——PB14/PB15
PWM1——PA8
PWM2——PA11


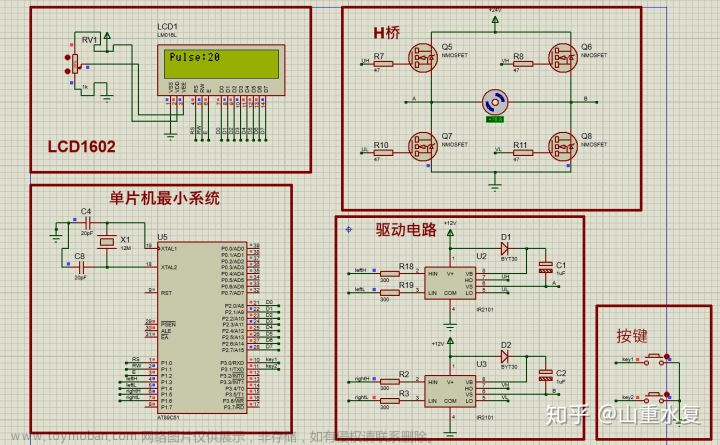
3.H桥驱动电路
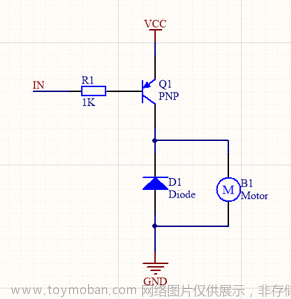
上面说到TB6612FNG 具有大电流MOSFET-H桥结构,那么很多小伙伴想问:什么是H桥结构呢?我以下面两张图举例,帮助大家简单化理解H桥电路结构。
注:图中的电路Q1,Q2,Q3,Q4为三极管,而TB6612内部集成的是四个MOSFET,我以下图举例,大家不可把下图看做是TB6612内部电路,其内部电路可查看TB6612的参考手册。
① 当Q1,Q4导通,Q2,Q3关断时,电流从Q1,从电机正极通过电机负极,再从Q4流出,完成一条回路,电机Motor正转。

① 当Q2,Q3导通,Q1,Q4关断时,电流从Q3,从电机负极通过电机正极,再从Q2流出,完成一条回路,电机Motor反转。

二、软件编程
1.电机驱动函数——motor.c
1)电机GPIO初始化函数
入口参数:无
- 初始化GPIO–PB12、PB13、PB14、PB15为推挽输出
void Motor_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);// 开启时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_Out_PP;// 初始化GPIO--PB12、PB13、PB14、PB15为推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_12 | GPIO_Pin_13 | GPIO_Pin_14 | GPIO_Pin_15;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
}
2)限幅函数
入口参数:电机A脉冲个数,电机B脉冲个数
- 限制电机的脉冲个数在规定范围内,有个最值,即自动重装载值(我设置的是PWM_MAX = 7200,PWM_MIN = -7200)
void Limit(int *motoA,int *motoB)
{
if(*motoA>PWM_MAX)*motoA=PWM_MAX;
if(*motoA<PWM_MIN)*motoA=PWM_MIN;
if(*motoB>PWM_MAX)*motoB=PWM_MAX;
if(*motoB<PWM_MIN)*motoB=PWM_MIN;
}
3)绝对值函数(非常通用,建议保存!!)
入口参数:常规变量
- 通过与0比较,大于0则返回不变的值,小于0则返回相反的值。
int abs(int p)
{
int q;
q=p>0?p:(-p);
return q;
}
4)赋值函数
入口参数:电机A脉冲个数,电机B脉冲个数
- 入口参数即为PID运算完成后的最终PWM值(后续会讲解PID算法的实现)
void Load(int moto1,int moto2)
{
//1.研究正负号,对应正反转
if(moto1>0)
Ain1=1,Ain2=0;//正转
else
Ain1=0,Ain2=1;//反转
//2.研究PWM值
TIM_SetCompare1(TIM1,abs(moto1));
//1.研究正负号,对应正反转
if(moto2>0)
Bin1=1,Bin2=0;
else
Bin1=0,Bin2=1;
//2.研究PWM值
TIM_SetCompare4(TIM1,abs(moto2));
}
2.电机驱动函数头文件——motor.h
#ifndef _MOTOR_H
#define _MOTOR_H
#include "sys.h"
#define Ain1 PBout(14)
#define Ain2 PBout(15)
#define Bin1 PBout(13)
#define Bin2 PBout(12)
void Motor_Init(void);
void Limit(int *motoA,int *motoB);
int abs(int p);
void Load(int moto1,int moto2);
#endif
3.PWM函数——pwm.c
1. 定时器初始化函数
入口参数:预分频值,自动重装载值
- PA8,PA11复用推挽输出
- 对应定时器1通道1和通道4
- 开启MOE主输出使能(高级定时器特有!!!)
void PWM_Init_TIM1(u16 Psc,u16 Per)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_TIM1 | RCC_APB2Periph_AFIO,ENABLE);//开启时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_AF_PP; // 初始化GPIO--PA8、PA11为复用推挽输出
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_8 | GPIO_Pin_11;
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&GPIO_InitStruct);
TIM_TimeBaseStructInit(&TIM_TimeBaseInitStruct); // 初始化定时器。
TIM_TimeBaseInitStruct.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period=Per;
TIM_TimeBaseInitStruct.TIM_Prescaler=Psc;
TIM_TimeBaseInit(TIM1,&TIM_TimeBaseInitStruct); // TIM1
TIM_OCInitStruct.TIM_OCMode=TIM_OCMode_PWM1; // 初始化输出比较
TIM_OCInitStruct.TIM_OCPolarity=TIM_OCPolarity_High;
TIM_OCInitStruct.TIM_OutputState=TIM_OutputState_Enable;
TIM_OCInitStruct.TIM_Pulse=0;
TIM_OC1Init(TIM1,&TIM_OCInitStruct);
TIM_OC4Init(TIM1,&TIM_OCInitStruct);
TIM_CtrlPWMOutputs(TIM1,ENABLE);// 高级定时器专属!!!--MOE主输出使能
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);// OC1预装载寄存器使能
TIM_OC4PreloadConfig(TIM1,TIM_OCPreload_Enable);// OC4预装载寄存器使能
TIM_ARRPreloadConfig(TIM1,ENABLE);// TIM1在ARR上预装载寄存器使能
TIM_Cmd(TIM1,ENABLE); // 开定时器。
}
4.PWM函数头文件——pwm.h文章来源:https://www.toymoban.com/news/detail-736709.html
#ifndef _PWM_H
#define _PWM_H
#include "sys.h"
void PWM_Init_TIM1(u16 Psc,u16 Per);
#endif
以上就是平衡小车系列文章第二讲——电机驱动,包括硬件结构讲解和STM32软件编程的讲解,文章中出现错误或者小伙伴对以上内容有所疑问,欢迎大家在评论区留言,小政看到后会尽快回复大家!文章来源地址https://www.toymoban.com/news/detail-736709.html
到了这里,关于(二)【平衡小车制作】电机驱动(超详解)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!