智能小车入门
本文旨在收集整理linux系统、ROS系统、树莓派、ssh软件的相关基础知识。
重点是ROS系统相关的知识,根据该实验课程的要求,最后修改的代码,都是由ROS组织起来,运行在ROS环境下的。
1、ssh软件–mobaXterm
-
ssh:SSH通过在网络中创建安全隧道来实现SSH客户端与服务器之间的连接。
-
如何实现这种连接:2023年10款好用的SSH客户端软件推荐
-
mobaXterm:MobaXterm详细使用教程系列一
当然,直接通过虚拟机里面的ubuntu系统的终端,使用ssh EPRobot@192.168.12.1命令也是可以的,但是和小车之间传输文件不方便。
关于和小车之间的通信:通过无线wifi进行组网,把小车和pc(或者虚拟机里面的操作系统)放在同一个局域网下。
同一个局域网 等价于 IP地址在同一个网段,比如这里的是192.168.12.xxx。
ping:工作在 TCP/IP网络体系结构中应用层的一个服务命令, 主要是向特定的目的主机发送 ICMP(Internet Control Message Protocol 因特网报文控制协议)Echo 请求报文,测试目的站是否可达及了解其有关状态。(摘自百度百科)不用深究
arp:Arp命令用于显示和修改地址解析协议 (ARP)使用的“IP到物理”地址转换表。不用深究。
2、linux系统
- 操作系统:常见电脑操作系统有windows、linux、macOS、HarmonyOS、unix
- linux的发行版本:针对不同场景,有不同的linux发行版本,ubuntu是一种带有图形化界面的发行版本。centos是一种非图形化的,只能使用命令行工具,通常用在服务器上。
- 文件系统:操作系统管理文件的方法和数据结构。我们只需要理解目录和文件的概念即可。
- 文件属性:菜鸟教程——Linux 文件基本属性
- Linux 文件与目录管理以及常用命令:菜鸟教程——Linux 文件与目录管理
- vim:一种文本编辑器,和windows的记事本一个地位,只不过vim没有图形界面,程序员都爱用这种,和vim同样性质的还有一个工具叫emacs。简单学习一下,会打开文件,修改文件,保存文件就可以了。高级操作以后进公司上班了再学。转码必备佳品。菜鸟教程——Linux vi/vim
学习建议:把这些命令执行一遍,就能理解他们有什么用处了。另外,不建议学的太深入,感兴趣的或者想转码的同学,下个学期可以找相关的课程选修,这里面的知识点太多了。
最常用的命令:cd、ls、vim
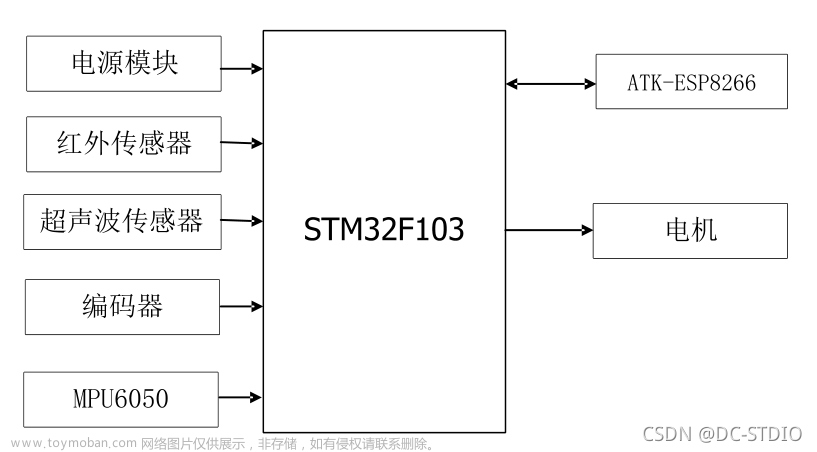
3、树莓派
树莓派就是一个小电脑,只不过没有显示器和键盘鼠标,如果外接上这些显示和输入设备,和大家手中的笔记本是同一个性质的东西。
这台小车的树莓派上面安装的是Linux系统,发行版本是ubuntu18.04,另外还安装了ROS相关的一些软件。
实际上树莓派可以安装ARM架构的其它操作系统。
了解一下即可,暂时不用深入学习。
4、ROS系统
一种机器人操作系统,但是它不同于传统意义上的操作系统,它和windos、linux不是一个级别的,你可以把它比作是图书管理系统,它只是用来统筹机器人各个程序的“大脑”,通常它运行在linux系统上面(这解释了为什么小车的树莓派是ubuntu系统)。
相关知识:仔细理解
- ROS的系统架构:https://zhuanlan.zhihu.com/p/337967765
- ROS的文件系统:https://zhuanlan.zhihu.com/p/338042120
- ROS的通信机制:https://zhuanlan.zhihu.com/p/338299938
这三块内容对于理解小车是如何工作的至关重要。文章来源:https://www.toymoban.com/news/detail-737300.html
学习建议:先跑通手册的例程,然后带着疑问来理解这几篇文章。边看文章,再一边运行例程,同时使用rostopic、rosnode等命令看看这些话题、这些节点究竟组织了一下什么数据在里面。文章来源地址https://www.toymoban.com/news/detail-737300.html
到了这里,关于嵌入式机器人系统ROS入门相关知识点介绍的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!