文章来源地址https://www.toymoban.com/news/detail-737425.html
文章来源:https://www.toymoban.com/news/detail-737425.html
到了这里,关于RT-DERT:在实时目标检测上,DETRs打败了yolo的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
这篇具有很好参考价值的文章主要介绍了RT-DERT:在实时目标检测上,DETRs打败了yolo。希望对大家有所帮助。如果存在错误或未考虑完全的地方,请大家不吝赐教,您也可以点击"举报违法"按钮提交疑问。
文章来源地址https://www.toymoban.com/news/detail-737425.html
文章来源:https://www.toymoban.com/news/detail-737425.html
到了这里,关于RT-DERT:在实时目标检测上,DETRs打败了yolo的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处: 如若内容造成侵权/违法违规/事实不符,请点击违法举报进行投诉反馈,一经查实,立即删除!

3D目标检测是根据物体的形状、位置和方向来识别和定位物体的任务。在2D目标检测中,被检测到的物体仅表示为矩形边界框。3D目标检测任务通过预测物体周围的包围框,可以获取物体的三维位置信息。 3D目标检测在各行各业都有广泛的应用。一些常见的用途包括: 🎯 机器
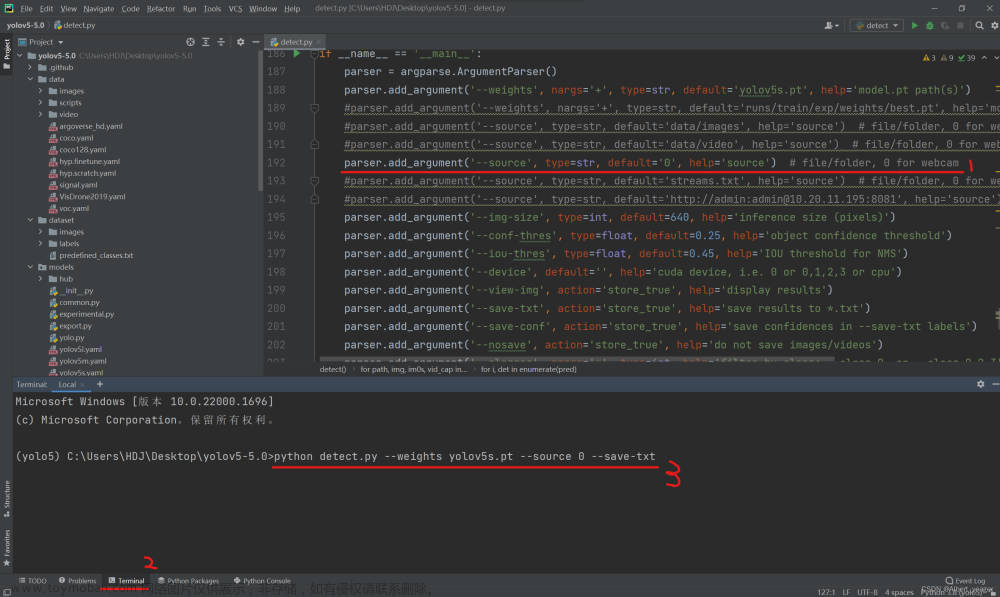
本文将分享保存实时目标检测结果的方法,包括将目标信息逐帧保存到.txt文件中、逐帧输出检测结果图片、以及如何保存所有检测图片(包括视野中无目标的帧)。 目录 0.准备 1.目标信息保存 2.检测图片保存 3.保存所有帧 本文以单摄像头实时目标检测进行演

paper:https://arxiv.org/pdf/2401.17270.pdf Github:GitHub - AILab-CVC/YOLO-World: Real-Time Open-Vocabulary Object Detection online demo:https://huggingface.co/spaces/stevengrove/YOLO-World 目录 0. 摘要 1. 引言 2. 相关工作 2.1. 传统目标检测 2.2. 开放词汇目标检测 3. 方法 3.1. 预训练范式:区域-文本对 3.2. 模型架构
摘要:在本教程中,我们将介绍YOLOv8的基本概念和原理,然后用Python实现一个简单的实时目标检测应用。 正文: 车牌识别视频 车辆识别视频 一、YOLOv8简介 YOLOv8(You Only Look Once v8)是一种快速、准确的实时目标检测算法。相较于前代YOLO版本,YOLOv8在检测速度和准确率上取得

ReadPaper https://readpaper.com/pdf-annotate/note?pdfId=4748421678288076801¬eId=1920373270663763712 在本报告中,我们提出了一种快速准确的目标检测方法,称为DAMO-YOLO,它比最先进的YOLO系列实现了更高的性能。DAMO-YOLO 通过一些新技术从 YOLO 扩展,包括神经架构搜索 (NAS)、高效的重新参数化广义

文章目录 系列文章目录 技术干货集锦 前言 一、摘要 二、正文分析 1.引入库 2.读入数据 总结 我们提出了YOLO,一种新的目标检测方法。之前的目标检测工作将分类器重新用于检测。相反,我们将目标检测视为一个回归问题,用于空间分离的边界框和相关类别概率。一个单一

这篇博客将在单摄像头目标检测的基础上,实现单网络多线程的实时目标检测。 在detect.py同级目录下新建streams.txt文件,每个视频流源单独成行: 本地摄像头填0 USB摄像头填1,2,3… IP摄像头要根据摄像头类型,按下面格式填写(我将在之后的博客中讲解实现) 0是电脑自带摄像

我将在上一节的基础上,一步一步展示如何实现单摄像头实时目标检测,其中包括我在配置过程中遇到的报错和解决方法。 将\\\'--source\\\'的默认值改为0 这里的\\\'0\\\'是指系统默认的第一个摄像头,通常是电脑自带的摄像头,所以一定要记得把摄像头打开再运行代码(有些电脑会有摄

- Colorimage: - Colorimage and depthimage: 1.一个可以运行YOLOv5的python环境 2.一个realsense相机和pyrealsense2库 在下面两个环境中测试成功 win10 python 3.8 Pytorch 1.10.2+gpu CUDA 11.3 NVIDIA GeForce MX150 ubuntu16.04 python 3.6 Pytorch 1.7.1+cpu 修改模型配置文件,以yolov5s为例。 如果使用自己训练的模型,需要进

参考博主hello689的教程,文中主要介绍了对于kitti的三维目标检测,本文对代码进行修改,添加旋转坐标轴的代码,以适配自己的雷达,可以参考这个博主的流程,再看本文对旋转参数的修改。 3.1 ros.py代码修改 3.2 pointpillar.launch代码修改 3.3 pointpillar.rviz代码修改 3.4 ros.py订阅话



