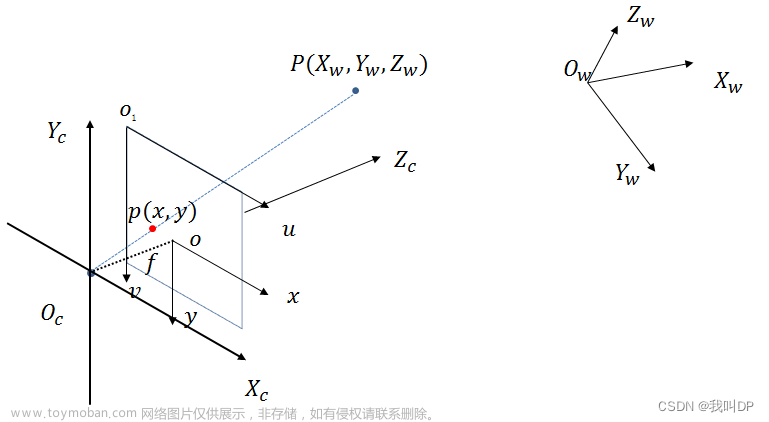
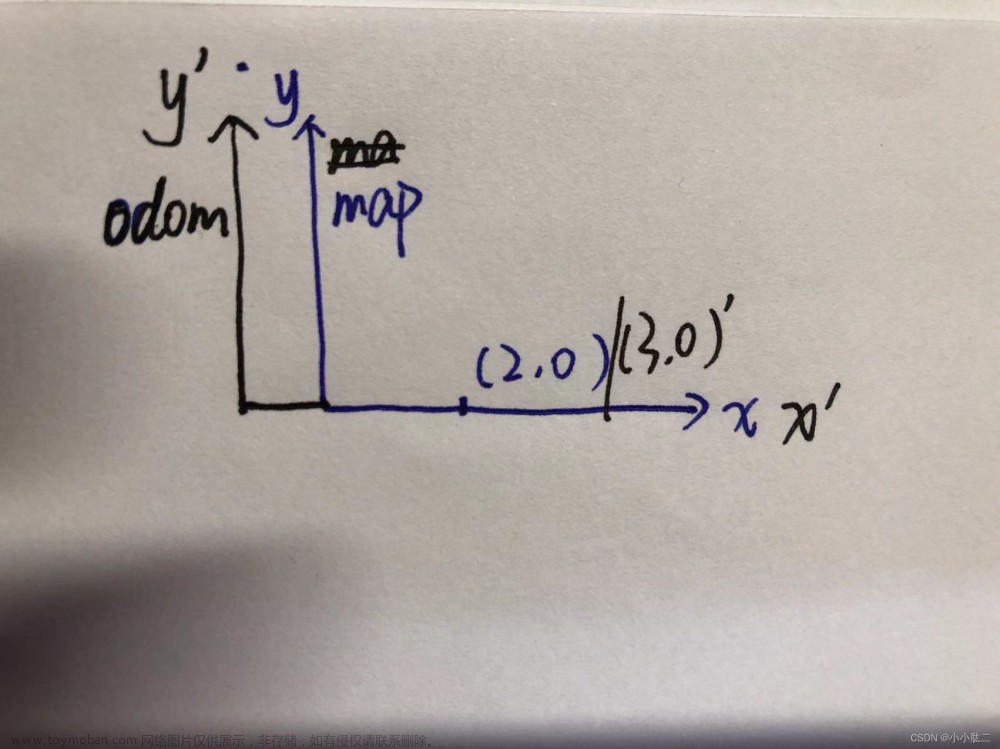
终于理清VMC控制方法了,对于很多新入门机器人的小伙伴,尤其像我这样做毕设前完全没有接触过机器人的本科生来说,坐标变换可谓是一大难,很多教材说的也是非常一本正经,非常不利于入门学习。本文对四足机器人坐标变换以及VMC控制方法作以简要介绍,力求简单易懂。
以下内容主要节选自我的毕业设计,迫不及待分享给大家,但涉及到毕业,禁止未经允许转载或抄袭,不要学术不端。






主要参考文献:
1.ETH机器人讲义文章来源:https://www.toymoban.com/news/detail-737696.html
2.《四足机器人对角小跑步态虚拟模型直觉控制方法研究》谢惠祥 国防科大文章来源地址https://www.toymoban.com/news/detail-737696.html
到了这里,关于机器人坐标系解读及四足机器人虚拟模型控制(VMC)控制方法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!