一、串口通信实验1
上位机给开发板发送数据,开发板将收到的数据发回给上位机
串口设置的一般步骤可以总结为如下几个步骤:
- 串口时钟使能,GPIO 时钟使能。
- 设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
- GPIO 初始化设置:要设置模式为复用功能。
- 串口参数初始化:设置波特率,字长,奇偶校验等参数。
- 开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
- 使能串口。
- 编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
- 获取相应中断状态
- 串口数据发送与接收
直接在主函数下编写代码如下:
#include "delay.h"
void uart_test()
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//1) 串口时钟和 GPIO 时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口时钟UART1使能,串口是挂载在 APB2 下面的外设
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//GPIO 时钟使能, 串口1 GPIO对应芯片引脚PA9,PA10
//2) 设置引脚复用器映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1);
//3) GPIO 端口模式设置:PA9 和 PA10 要设置为复用功能
GPIO_InitStructure.GPIO_Pin = (GPIO_Pin_9 | GPIO_Pin_10);//GPIOA9 与 GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Fast_Speed;//速度 50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化 PA9,PA10
//4) 串口参数初始化:设置波特率,字长,奇偶校验等参数
USART_InitStructure.USART_BaudRate = 115200;//波特率设置为115200
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//硬件流控制选择无
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//字长为 8 位数据格式
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//6) 使能串口
USART_Cmd(USART1, ENABLE); //使能串口1
//5) 开启中断并且初始化 NVIC,使能相应中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开启中断,接收到数据中断
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//串口1中断通道,在顶层头文件stm32f4xx.h中第223行定义
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;//IRQ 通道使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级 3
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
}
//7) 中断服务函数(在启动文件startup_stm32f40_41xxx.s中124行已定义好,不可自定义名字)
void USART1_IRQHandler()
{
//8) 获取相应中断状态
if( USART_GetITStatus(USART1, USART_IT_RXNE))//使能了一个中断,判断中断标志位,中断是否发生
{
u8 res;
//9) 串口数据发送与接收
res = USART_ReceiveData(USART1);//收到数据后读出来
USART_SendData(USART1,res);//读到数据后立刻发送出去
}
}
int main()
{
delay_init(168); //初始化延时函数
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2, 实验开启了串口中断,所以我们在系统初始化的时候需要先设置系统的中断优先级分组
uart_test();//初始化
while(1);
}
编译后报错…\OBJ\Template.axf: Error: L6200E: Symbol USART1_IRQHandler multiply defined (by usart.o and main.o).
因为在uart.c中同样定义了中断服务函数,报错重定义,在uart.c中注释掉中断服务函数即可
编译完成后烧录进开发板,打开XCOM上位机软件,上位机串口的设置与步骤四代码中串口参数初始化设置相同,勾选上发送新行,可以看到上位机发送的数据都被发送回来了
二、串口通信实验2
直接编译正点原子串口通信实验例程,主要关注main函数和USART1_IRQHandler中断服务函数的逻辑,不太好理解,主要关注下USART_RX_STA这个16位的变量做到类似于标志位的作用与 0x0a换行符0x0d为回车符的处理过程。USART_RX_STA的前13位作为数据长度,第14位收到0x0d后置位0x4000,第15位收到0x0a后置位0x8000后在主函数中发送接收到的数据,这些可以理解为自己定的协议。uart_init()函数与实验1中基本一致。
主函数代码如下:
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "beep.h"
#include "key.h"
int main(void)
{
u8 t;
u8 len;
u16 times=0;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
delay_init(168); //延时初始化
uart_init(115200); //串口初始化波特率为115200
LED_Init(); //初始化与LED连接的硬件接口
while(1)
{
if(USART_RX_STA&0x8000)//当USART_RX_STA值为0x8000时表示收完上位机数据
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
printf("\r\n您发送的消息为:\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART1, USART_RX_BUF[t]); //向串口1发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束 再正点原子库函数文档中这两行是直接操作寄存器的
}
printf("\r\n\r\n");//插入换行
USART_RX_STA=0;//在此处清零后才能继续接收上位机数据不然一直都是0x8000
}else//在没有收到数据时打印信息提示系统在运行
{
times++;
if(times%5000==0)
{
printf("\r\nALIENTEK 探索者STM32F407开发板 串口实验\r\n");
printf("正点原子@ALIENTEK\r\n\r\n\r\n");
}
if(times%200==0)printf("请输入数据,以回车键结束\r\n");
if(times%30==0)LED0=!LED0;//闪烁LED,提示系统正在运行.
delay_ms(10);
}
}
}
中断服务函数代码如下:文章来源:https://www.toymoban.com/news/detail-738012.html
void USART1_IRQHandler(void) //串口1中断服务程序
{
u8 Res;
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntEnter();
#endif
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收到数据产生中断(接收到的数据必须是0x0d 0x0a结尾) 0x0a为换行符 0x0d为回车符
{
Res =USART_ReceiveData(USART1);//(USART1->DR); //读取接收到的数据
if((USART_RX_STA&0x8000)==0)//接收未完成
{
if(USART_RX_STA&0x4000)//接收到了0x0d
{
if(Res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x8000; //下一次接受的的数据为0x0a表示接收完成了,将USART_RX_STA赋值为0x8000在主函数中发送数据
}
else //还没收到0X0D,数据还在一直发
{
if(Res==0x0d)USART_RX_STA|=0x4000;//当收到0X0D时将USART_RX_STA值置为0x4000
else
{
USART_RX_BUF[USART_RX_STA&0X3FFF]=Res ;//将每次收到的数据存在数组中,0X3FFF表示前13位是数据长度
USART_RX_STA++;//计算数据长度,收到一个数据累加1
if(USART_RX_STA>(USART_REC_LEN-1))USART_RX_STA=0;//当接收到的数据大于规定的长度时视为接收数据错误,重新开始接收 USART_REC_LEN为自定义的长度
}
}
}
}
#if SYSTEM_SUPPORT_OS //如果SYSTEM_SUPPORT_OS为真,则需要支持OS.
OSIntExit();
#endif
}
烧录进开发板后通过上位机发送数据如下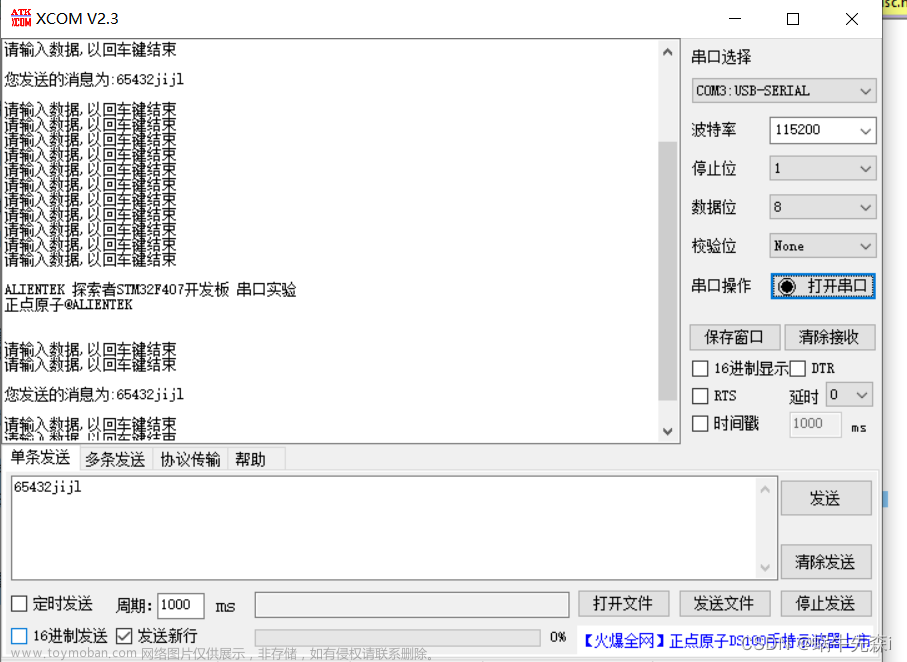
要记得勾选发送新行,如果不勾选上位机收不到发到设备的数据,因为没有收到0x0a和0x0d数据就不会发,如果不勾选一直发就会存在数组中直到超过数组长度重新接收。文章来源地址https://www.toymoban.com/news/detail-738012.html
到了这里,关于正点原子stm32F407学习笔记5——串口通信实验的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!