一、简介
由于工作关系,本人最近使用到了海康的网口及USB3.0接口的工业相机。现将相关内容进行整理记录。
二、开发环境
64位VS2013 +C#
Halcon12
海康MVS3.0.0
三、项目搭建
1、添加引用
引用海康相机动态库(MvCameraControl.Net.dll)
在VS项目文件中添加添加引用,如下图
引用MVS安装目录下MVS\Development\DotNet\MvCameraControl.Net.dll这个文件。
2、创建相机类
鼠标右键单击工程项目–添加–类,选择“类”,输入类的名称,例如Hikvision,点击右下角的“添加”。
在项目中使用海康相机时,为便于程序编写,可引入如下的命名空间:
using MvCamCtrl.NET;
1.创建需要用到的全局变量
public MyCamera myCamera;//相机对象
private MyCamera.MV_CC_DEVICE_INFO_LIST deviceList;//设备列表
private MyCamera.MV_CC_DEVICE_INFO deviceInfo;//设备对象
private string seriesStr;//接收相机序列号
private MyCamera.MVCC_INTVALUE stParam;//用于接收特定的参数
//为读取、保存图像创建的数组
UInt32 m_nBufSizeForDriver = 4096 * 3000;
byte[] m_pBufForDriver = new byte[4096 * 3000];
UInt32 m_nBufSizeForSaveImage = 4096 * 3000 * 3 + 3000;
byte[] m_pBufForSaveImage = new byte[4096 * 3000 * 3 + 3000];
创建相关函数
1.创建构造函数文章来源:https://www.toymoban.com/news/detail-738960.html
//在构造函数中实例化设备列表对象
public Hikvision()
{
deviceList = new MyCamera.MV_CC_DEVICE_INFO_LIST();
}
2.创建改变相机IP的函数
//成功返回0失败返回-1
//调用函数时可以传入需要改变的目标IP,如过没有传入则将相机IP设置为其所连接的网卡地址+1或-1
public int changeIP(string IP = "")
{
try
{
//获取相机相关信息,例如相机所连接网卡的网址
IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(deviceInfo.SpecialInfo.stGigEInfo, 0);
MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));
IPAddress cameraIPAddress;
string tempStr = "";
if (IP.Trim().Equals("") || !(IPAddress.TryParse(IP, out cameraIPAddress)))
{
//当前网卡的IP地址
UInt32 nNetIp1 = (gigeInfo.nNetExport & 0xFF000000) >> 24;
UInt32 nNetIp2 = (gigeInfo.nNetExport & 0x00FF0000) >> 16;
UInt32 nNetIp3 = (gigeInfo.nNetExport & 0x0000FF00) >> 8;
UInt32 nNetIp4 = (gigeInfo.nNetExport & 0x000000FF);
//根据网卡IP设定相机IP,如果网卡ip第四位小于252,则相机ip第四位+1,否则相机IP第四位-1
UInt32 cameraIp1 = nNetIp1;
UInt32 cameraIp2 = nNetIp2;
UInt32 cameraIp3 = nNetIp3;
UInt32 cameraIp4 = nNetIp4;
if (nNetIp4 < 252)
{
cameraIp4++;
}
else
{
cameraIp4--;
}
tempStr = cameraIp1 + "." + cameraIp2 + "." + cameraIp3 + "." + cameraIp4;
}
else
{
tempStr = IP;
}
IPAddress.TryParse(tempStr, out cameraIPAddress);
long cameraIP = IPAddress.NetworkToHostOrder(cameraIPAddress.Address);
//设置相机掩码
uint maskIp1 = (gigeInfo.nCurrentSubNetMask & 0xFF000000) >> 24;
uint maskIp2 = (gigeInfo.nCurrentSubNetMask & 0x00FF0000) >> 16;
uint maskIp3 = (gigeInfo.nCurrentSubNetMask & 0x0000FF00) >> 8;
uint maskIp4 = (gigeInfo.nCurrentSubNetMask & 0x000000FF);
IPAddress subMaskAddress;
tempStr = maskIp1 + "." + maskIp2 + "." + maskIp3 + "." + maskIp4;
IPAddress.TryParse(tempStr, out subMaskAddress);
long maskIP = IPAddress.NetworkToHostOrder(subMaskAddress.Address);
//设置网关
uint gateIp1 = (gigeInfo.nDefultGateWay & 0xFF000000) >> 24;
uint gateIp2 = (gigeInfo.nDefultGateWay & 0x00FF0000) >> 16;
uint gateIp3 = (gigeInfo.nDefultGateWay & 0x0000FF00) >> 8;
uint gateIp4 = (gigeInfo.nDefultGateWay & 0x000000FF);
IPAddress gateAddress;
tempStr = gateIp1 + "." + gateIp2 + "." + gateIp3 + "." + gateIp4;
IPAddress.TryParse(tempStr, out gateAddress);
long gateIP = IPAddress.NetworkToHostOrder(gateAddress.Address);
int temp = myCamera.MV_GIGE_ForceIpEx_NET((UInt32)(cameraIP >> 32), (UInt32)(maskIP >> 32), (UInt32)(gateIP >> 32));//执行更改相机IP的命令
if (temp == 0)
//强制IP成功
return 0;
//强制IP失败
return -1;
}
catch
{
return -1;
}
}
3.创建相机连接函数
public int connectCamera(string id)//连接相机,返回-1为失败,0为成功
{
this.seriesStr = id;
string m_SerialNumber = "";//接收设备返回的序列号
int temp;//接收命令执行结果
myCamera = new MyCamera();
try
{
temp = MyCamera.MV_CC_EnumDevices_NET(MyCamera.MV_GIGE_DEVICE | MyCamera.MV_USB_DEVICE, ref deviceList);//更新设备列表
if (temp != 0)
{
//设备更新成功接收命令的返回值为0,返回值不为0则为异常
return -1;
}
//强制相机IP
for (int i = 0; i < deviceList.nDeviceNum; i++)
{
/*******该部分用于获取相机名称、序列号等,从而对指定的相机进行IP更改******/
//更改IP的函数中也有该部分,重叠部分程序可进行相应的简化,本文暂不做处理
deviceInfo = (MyCamera.MV_CC_DEVICE_INFO)Marshal.PtrToStructure(deviceList.pDeviceInfo[i], typeof(MyCamera.MV_CC_DEVICE_INFO));//获取设备信息
IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(deviceInfo.SpecialInfo.stGigEInfo, 0);
MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));
/*****************************************************************/
m_SerialNumber = gigeInfo.chUserDefinedName;
if(deviceInfo.nTLayerType == MyCamera.MV_GIGE_DEVICE)
{
//判断是否为网口相机
if (seriesStr.Equals(m_SerialNumber))
{
//如果相机用户名正确则修改IP
temp = myCamera.MV_CC_CreateDevice_NET(ref deviceInfo);//更改IP前需要创建设备对象
forceIP();
}
}
}
//更改IP后需要重新刷新设备列表,否则打开相机时会报错
temp = MyCamera.MV_CC_EnumDevices_NET(MyCamera.MV_GIGE_DEVICE | MyCamera.MV_USB_DEVICE, ref deviceList);//更新设备列表
for (int i = 0; i < deviceList.nDeviceNum; i++)
{
deviceInfo = (MyCamera.MV_CC_DEVICE_INFO)Marshal.PtrToStructure(deviceList.pDeviceInfo[i], typeof(MyCamera.MV_CC_DEVICE_INFO));//获取设备
if (deviceInfo.nTLayerType == MyCamera.MV_GIGE_DEVICE)
{
IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(deviceInfo.SpecialInfo.stGigEInfo, 0);
MyCamera.MV_GIGE_DEVICE_INFO gigeInfo = (MyCamera.MV_GIGE_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_GIGE_DEVICE_INFO));
//m_SerialNumber = gigeInfo.chSerialNumber;//获取序列号
m_SerialNumber = gigeInfo.chUserDefinedName;//获取用户名
}
else if (deviceInfo.nTLayerType == MyCamera.MV_USB_DEVICE)
{
IntPtr buffer = Marshal.UnsafeAddrOfPinnedArrayElement(deviceInfo.SpecialInfo.stUsb3VInfo, 0);
MyCamera.MV_USB3_DEVICE_INFO usbInfo = (MyCamera.MV_USB3_DEVICE_INFO)Marshal.PtrToStructure(buffer, typeof(MyCamera.MV_USB3_DEVICE_INFO));
m_SerialNumber = usbInfo.chUserDefinedName;
}
if (seriesStr.Equals(m_SerialNumber))
{
temp = myCamera.MV_CC_CreateDevice_NET(ref deviceInfo);
if (MyCamera.MV_OK != temp)
{
//创建相机失败
return -1;
}
temp = myCamera.MV_CC_OpenDevice_NET();//
if (MyCamera.MV_OK != temp)
{
//打开相机失败
return -1;
}
return 0;
}
continue;
}
}
catch
{
return -1;
}
return 0;
}
4.创建开始采集、停止采集、关闭相机函数
public int startCamera()//相机开始采集,返回0为成功,-1为失败
{
int temp = myCamera.MV_CC_StartGrabbing_NET();
if (MyCamera.MV_OK != temp)
return -1;
return 0;
}
public int stopCamera()//停止相机采集,返回0为成功,-1为失败
{
int temp = myCamera.MV_CC_StopGrabbing_NET();
if (MyCamera.MV_OK != temp )
return -1;
return 0;
}
public int closeCamera()//关闭相机,返回0为成功,-1为失败
{
int temp = stopCamera();//停止相机采集
if (MyCamera.MV_OK != temp )
return -1;
temp = myCamera.MV_CC_CloseDevice_NET();
if (MyCamera.MV_OK != temp )
return -1;
temp = myCamera.MV_CC_DestroyDevice_NET();
if (MyCamera.MV_OK != temp )
return -1;
return 0;
}
5.创建发送软触发函数
//发送成功返回0,失败返回-1
public int softTrigger()
{
int temp = myCamera.MV_CC_SetCommandValue_NET("TriggerSoftware");
if (MyCamera.MV_OK != temp )
return -1;
return 0;
}
6.创建读取图像函数
函数返回Halcon图像库可以处理的Himage格式。
如何添加halcon图像库请自行百度,网上教程非常多
//读取成功返回Himage图像,失败返回NULL
public HImage readImage()
{
UInt32 nPayloadSize = 0;
int temp = myCamera.MV_CC_GetIntValue_NET("PayloadSize", ref stParam);
if (MyCamera.MV_OK != temp)
{
return null;
}
nPayloadSize = stParam.nCurValue;
if (nPayloadSize > m_nBufSizeForDriver)
{
m_nBufSizeForDriver = nPayloadSize;
m_pBufForDriver = new byte[m_nBufSizeForDriver];
m_nBufSizeForSaveImage = m_nBufSizeForDriver * 3 + 2048;
m_pBufForSaveImage = new byte[m_nBufSizeForSaveImage];
}
IntPtr pData = Marshal.UnsafeAddrOfPinnedArrayElement(m_pBufForDriver, 0);
MyCamera.MV_FRAME_OUT_INFO_EX stFrameInfo = new MyCamera.MV_FRAME_OUT_INFO_EX();
temp = myCamera.MV_CC_GetOneFrameTimeout_NET(pData, m_nBufSizeForDriver, ref stFrameInfo, 1000);//获取一帧图像,超时时间设置为1000
if (MyCamera.MV_OK != temp)
{
return null;
}
HImage image = new HImage();
if (IsMonoData(stFrameInfo.enPixelType))//判断是否为黑白图像
{
//如果是黑白图像,则利用Halcon图像库中的GenImage1算子来构建图像
image .GenImage1("byte", (int)stFrameInfo.nWidth, (int)stFrameInfo.nHeight, pData);
}
else
{
if (stFrameInfo.enPixelType == MyCamera.MvGvspPixelType.PixelType_Gvsp_RGB8_Packed)
{
//如果彩色图像是RGB8格式,则可以直接利用GenImageInterleaved算子来构建图像
image .GenImageInterleaved(pData, "rgb", (int)stFrameInfo.nWidth, (int)stFrameInfo.nHeight, 0, "byte", (int)stFrameInfo.nWidth, (int)stFrameInfo.nHeight, 0, 0, -1, 0);
}
else
{
//如果彩色图像不是RGB8格式,则需要将图像格式转换为RGB8。
IntPtr pBufForSaveImage = IntPtr.Zero;
if (pBufForSaveImage == IntPtr.Zero)
{
pBufForSaveImage = Marshal.AllocHGlobal((int)(stFrameInfo.nWidth * stFrameInfo.nHeight * 3 + 2048));
}
MyCamera.MV_PIXEL_CONVERT_PARAM stConverPixelParam = new MyCamera.MV_PIXEL_CONVERT_PARAM();
stConverPixelParam.nWidth = stFrameInfo.nWidth;
stConverPixelParam.nHeight = stFrameInfo.nHeight;
stConverPixelParam.pSrcData = pData;
stConverPixelParam.nSrcDataLen = stFrameInfo.nFrameLen;
stConverPixelParam.enSrcPixelType = stFrameInfo.enPixelType;
stConverPixelParam.enDstPixelType = MyCamera.MvGvspPixelType.PixelType_Gvsp_RGB8_Packed;//在此处选择需要转换的目标类型
stConverPixelParam.pDstBuffer = pBufForSaveImage;
stConverPixelParam.nDstBufferSize = (uint)(stFrameInfo.nWidth * stFrameInfo.nHeight * 3 + 2048);
myCamera.MV_CC_ConvertPixelType_NET(ref stConverPixelParam);
image .GenImageInterleaved(pBufForSaveImage, "rgb", (int)stFrameInfo.nWidth, (int)stFrameInfo.nHeight, 0, "byte", (int)stFrameInfo.nWidth, (int)stFrameInfo.nHeight, 0, 0, -1, 0);
//释放指针
Marshal.FreeHGlobal(pBufForSaveImage);
}
}
return image ;
}
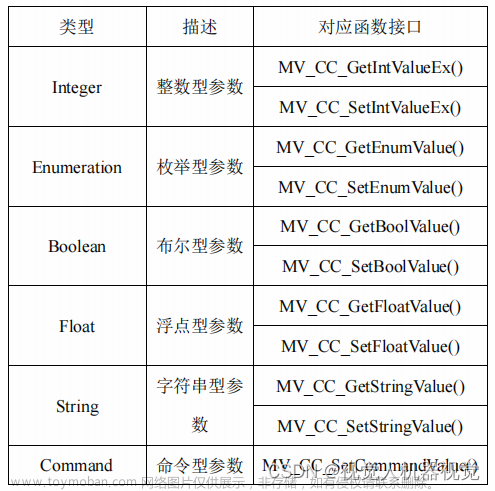
7.在海康MVS安装目录下MVS\Development\Documentations\MvCameraNode.xlsx是一个关于参数设置的文档,可以参考MVS并结合该文档进行相应参数的设置,非常方便。
8.实例化相机对象,并通过软触发采集图像
Hikvision camera = new Hikvision();//创建相机对象并实例化
camera.connectCamera("123456");//连接相机,传入相机序列号123456
camera.startCamera();//开启相机采集
camera.setExposureTime(10000);//设置曝光时间为10ms
camera.softTrigger();//发送软触发采集图像
Himage image=camera.readImage();//获取采集到且转换后的图像
camera.stopCamera();//停止相机采集
camera.closeCamera();//关闭相机
————————————————
版权声明:本文为CSDN博主「大_樱_桃」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/biggestcherry/article/details/87011094文章来源地址https://www.toymoban.com/news/detail-738960.html
到了这里,关于C# 获取海康相机的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!