✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
⛄ 内容介绍
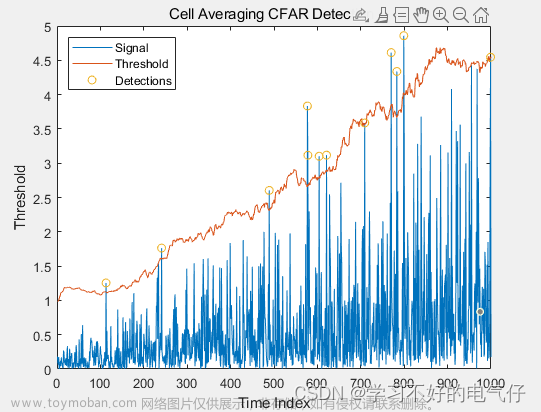
虚警检测是一种在雷达系统中广泛应用的技术,用于识别并剔除由于噪声或其他干扰引起的虚警信号。在本文中,我们将介绍三种常用的恒虚警检测算法:CA-CFAR、GO-CFAR和SO-CFAR,并提供相应的Matlab代码。
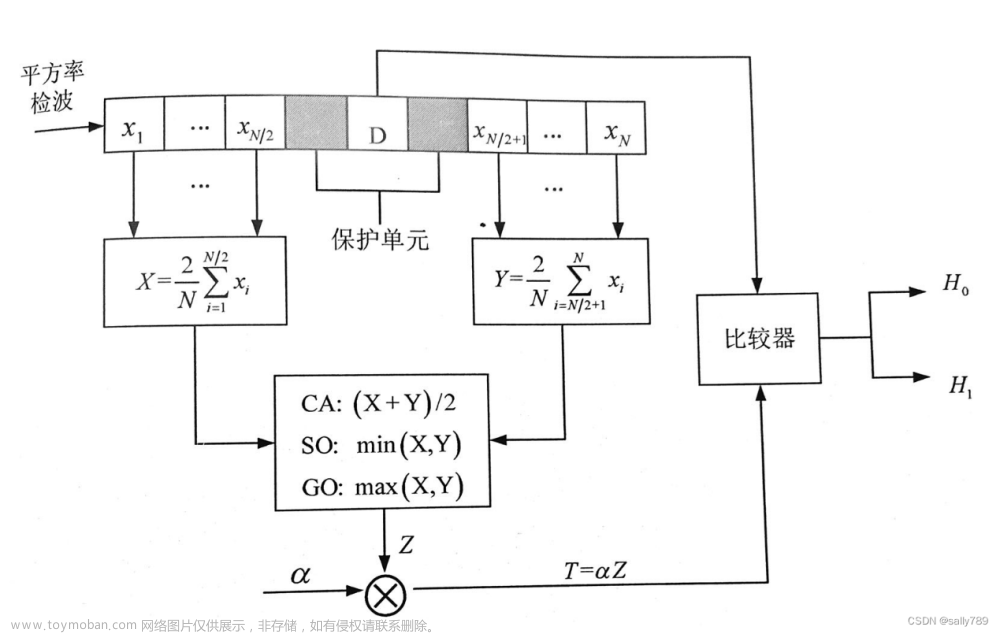
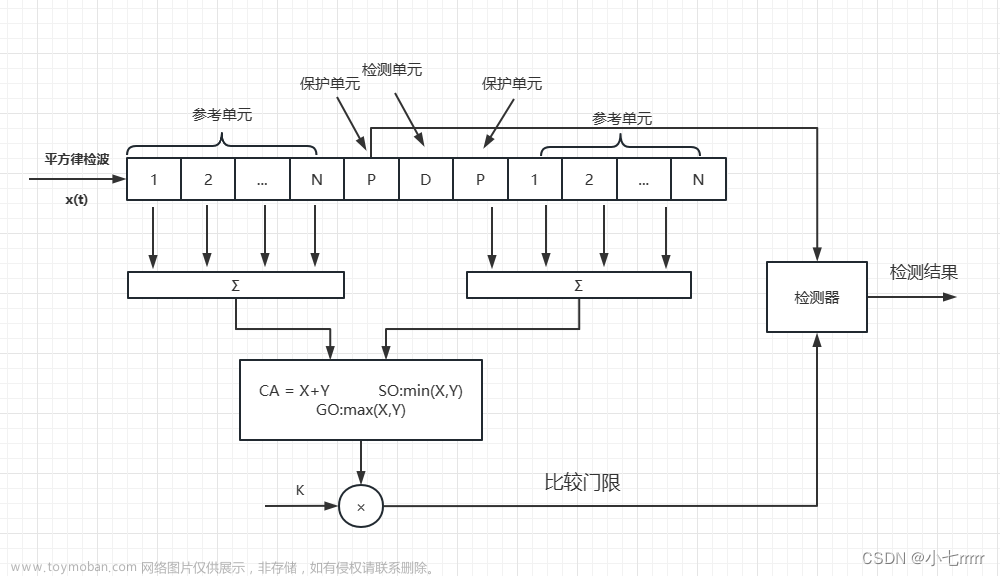
CA-CFAR(Constant False Alarm Rate)算法是最常见的虚警检测算法之一。该算法通过计算邻域内的信号功率的平均值,然后与目标信号的功率进行比较,从而确定是否存在虚警信号。CA-CFAR算法的优点是简单易实现,但对于非均匀背景噪声的情况下可能存在一定的误报率。
GO-CFAR(Greatest of CFAR)算法是一种改进的虚警检测算法,它通过选择邻域内信号功率的最大值作为参考值,并与目标信号的功率进行比较。相比于CA-CFAR算法,GO-CFAR算法能够更好地适应非均匀背景噪声的情况,并减少误报率。
SO-CFAR(Smallest of CFAR)算法是另一种改进的虚警检测算法,它选择邻域内信号功率的最小值作为参考值,并与目标信号的功率进行比较。SO-CFAR算法在一些特定的应用场景中表现出色,但在存在强干扰的情况下可能会导致较高的误报率。
为了帮助读者更好地理解这些算法,我们提供了基于Matlab的代码示例。通过运行这些代码,读者可以自行实验并观察不同算法在不同情况下的表现。代码中包含了详细的注释,以帮助读者理解算法的实现细节。
总结起来,虚警检测是一项重要的技术,用于剔除雷达系统中的虚警信号。CA-CFAR、GO-CFAR和SO-CFAR是常用的恒虚警检测算法,每种算法都适用于不同的应用场景。通过本文提供的Matlab代码示例,读者可以更好地理解和应用这些算法。
⛄ 部分代码
function [ index, XT ] = cfar_ac( xc, N, pro_N, PAD)% 假设回波服从高斯分布%alpha=N.*(PAD.^(-1./N)-1);index=1+N/2+pro_N/2:length(xc)-N/2-pro_N/2;XT=zeros(1,length(index));for i=indexcell_left=xc(1,i-N/2-pro_N/2:i-pro_N/2-1);cell_right=xc(1,i+pro_N/2+1:i+N/2+pro_N/2);Z=(sum(cell_left)+sum(cell_right))./N;XT(1,i-N/2-pro_N/2)=Z.*alpha;endend
⛄ 运行结果



⛄ 参考文献
[1] 郝程鹏,侯朝焕,王维建.基于改进的VI-CFAR算法的分布式CFAR检测[J].系统仿真学报, 2007, 19(4):830-832.DOI:10.3969/j.issn.1004-731X.2007.04.034.
[2] 宋俊福.基于杂波图和变换域的恒虚警率处理[D].大连海事大学,2013.文章来源:https://www.toymoban.com/news/detail-739407.html
[3] 周根祥.某些修正型单元平均恒虚警处理器在多目标环境下的性能分析[J].现代雷达, 1983(2):94-109.DOI:CNKI:SUN:XDLD.0.1983-02-010.文章来源地址https://www.toymoban.com/news/detail-739407.html
⛳️ 代码获取关注我
❤️部分理论引用网络文献,若有侵权联系博主删除
❤️ 关注我领取海量matlab电子书和数学建模资料
🍅 仿真咨询
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化
2 机器学习和深度学习方面
卷积神经网络(CNN)、LSTM、支持向量机(SVM)、最小二乘支持向量机(LSSVM)、极限学习机(ELM)、核极限学习机(KELM)、BP、RBF、宽度学习、DBN、RF、RBF、DELM、XGBOOST、TCN实现风电预测、光伏预测、电池寿命预测、辐射源识别、交通流预测、负荷预测、股价预测、PM2.5浓度预测、电池健康状态预测、水体光学参数反演、NLOS信号识别、地铁停车精准预测、变压器故障诊断
2.图像处理方面
图像识别、图像分割、图像检测、图像隐藏、图像配准、图像拼接、图像融合、图像增强、图像压缩感知
3 路径规划方面
旅行商问题(TSP)、车辆路径问题(VRP、MVRP、CVRP、VRPTW等)、无人机三维路径规划、无人机协同、无人机编队、机器人路径规划、栅格地图路径规划、多式联运运输问题、车辆协同无人机路径规划、天线线性阵列分布优化、车间布局优化
4 无人机应用方面
无人机路径规划、无人机控制、无人机编队、无人机协同、无人机任务分配
5 无线传感器定位及布局方面
传感器部署优化、通信协议优化、路由优化、目标定位优化、Dv-Hop定位优化、Leach协议优化、WSN覆盖优化、组播优化、RSSI定位优化
6 信号处理方面
信号识别、信号加密、信号去噪、信号增强、雷达信号处理、信号水印嵌入提取、肌电信号、脑电信号、信号配时优化
7 电力系统方面
微电网优化、无功优化、配电网重构、储能配置
8 元胞自动机方面
交通流 人群疏散 病毒扩散 晶体生长
9 雷达方面
卡尔曼滤波跟踪、航迹关联、航迹融合
到了这里,关于【虚警检测】基于CA-CFAR(单元平均恒虚警)、GO-CFAR(最大选择恒虚警)、SO-CFAR(最小选择恒虚警)算法的恒虚警检测附Matlab代码的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!