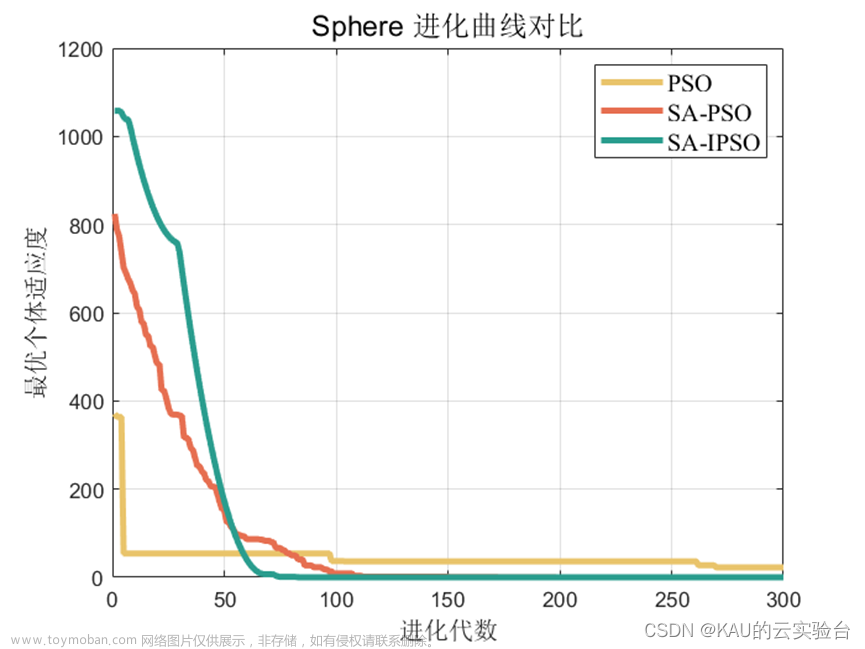
整理了一个路径规划demo,当然图是改进的效果 demo分别有对应的开源 可以在网上搜到,我觉得已经介绍的很详细了,所以不做过多的解释,传送门在下面
(写的不好 轻喷)
粒子群算法
粒子群本质是参数寻优问题,也就是说在运用到路径规划这块需要对规划的路径进行模型建立,这块的demo当时是从一个b站up那块了解的,我记得好像有个up做了这个的讲解 但是我没找到QAQ

传送门
b站up的链接:
粒子群算法,路径规划,星际穿越_哔哩哔哩_bilibili
开源的粒子群路径规划demo链接(要感谢上面up的分享):
Optimal Robot Path Planning using PSO in MATLAB - Yarpiz
(多说一嘴:咱就是说要有点学术态度吧,别直接照搬照抄一点改进都没有,直接拿来用就发论文,看到了真感觉很恶心 说的是这篇论文:Verification and Analysis of Two-dimensional Path Planning Objective Function Optimization Based on Classical Particle Swarm Optimization Algorithm)
话说回来,对路径建立数学模型(适应度函数),那么首要的任务是确定要量化哪些信息,demo写在了MyCost.m里面 包含两部分:1.路径长度 2.碰撞惩罚

在确定了适应度函数之后,就可以用粒子群算法进行寻优了,寻优过程在pso.m中进行。
在初始化时需要确定粒子群的维度n,这个维度可以理解为路径中间节点的个数,节点越多需要迭代的次数也就越多,生成最优路径的可能性也就越大。
%% Problem Definition
model=CreateModel(); %环境初始化
%@(x) 变量名 = @(输入参数列表)运算表达式 既是一种可用于传参和赋值的变量,又可以作为函数名使用。
%这个x是 第x个粒子群
CostFunction=@(x) MyCost(x,model); % CostFunction 适应度函数 做了一个声明
nVar=model.n; % Number of Decision Variables 决策变量数量 10个位置点
VarSize=[1 nVar]; %[1 10] % Size of Decision Variables Matrix 决策变量矩阵的大小
%设置边界
VarMin.x=model.xmin;
VarMax.x=model.xmax;
VarMin.y=model.ymin;
VarMax.y=model.ymax;
%% PSO Parameters
%迭代次数
MaxIt=500; % Maximum Number of Iterations 500
%种群规模
nPop=150; % Population Size (Swarm Size)
%粒子群的三个系数 w为惯性权重系数 c1、c2分别为向个体和群体最优飞行速度
%wdamp的设置是为了降低惯性,提升后期局部搜索能力
w=1; % Inertia Weight
wdamp=0.98; % Inertia Weight Damping Ratio
c1=1.5; % Personal Learning Coefficient
c2=1.5; % Global Learning Coefficient
%定义速度可行域
alpha=0.1;
VelMax.x=alpha*(VarMax.x-VarMin.x); % Maximum Velocity
VelMin.x=-VelMax.x; % Minimum Velocity
VelMax.y=alpha*(VarMax.y-VarMin.y); % Maximum Velocity
VelMin.y=-VelMax.y; % Minimum Velocity
%% Initialization 种群初始化
% Create Empty Particle Structure
empty_particle.Position=[];
empty_particle.Velocity=[];
empty_particle.Cost=[];
empty_particle.Sol=[];
%结构体里的结构体
empty_particle.Best.Position=[];
empty_particle.Best.Cost=[];
empty_particle.Best.Sol=[];
% Initialize Global Best 因为是找最优(短)距离,所以在一开始置为无穷大
GlobalBest.Cost=inf;
% Create Particles Matrix 创建粒子矩阵 维度(nPop,1)
particle=repmat(empty_particle,nPop,1);
% Initialization Loop
for i=1:nPop
%i = 1的时候 等距离生成10个点 后面的就随机生成
% Initialize Position
if i > 1 %安排后面那些位置信息
particle(i).Position=CreateRandomSolution(model);
else
% Straight line from source to destination 从源到目标的直线
%linspace ==> 在初始点目标点之间等距离生成 n+2(12个点包括初始点和目标点)
xx = linspace(model.xs, model.xt, model.n+2);
yy = linspace(model.ys, model.yt, model.n+2);
%把10个点的信息传给particle
particle(i).Position.x = xx(2:end-1);
particle(i).Position.y = yy(2:end-1);
end
% Initialize Velocity 速度赋0 VarSize=[1,10] zeros(VarSize) ==> zeros(1,10)
% 相当于返回一个1X10的全零矩阵
particle(i).Velocity.x=zeros(VarSize);
particle(i).Velocity.y=zeros(VarSize);
%Evaluation返回路径长度 Cost 和 Sol(拟合点 距离 容忍度 可靠性)
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best 更新个体数据
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best 更新全局数据(选择cost小的值)
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
% Array to Hold Best Cost Values at Each Iteration 在每次迭代中保持最优值的阵列
BestCost=zeros(MaxIt,1); %迭代矩阵初始化 每一次的最优值
%% PSO Main Loop 主函数
for it=1:MaxIt(迭代次数)
for i=1:nPop(粒子个数)
%x方向
% 更新速度(粒子群的基本公式)
particle(i).Velocity.x = w*particle(i).Velocity.x ...
+ c1*rand(VarSize).*(particle(i).Best.Position.x-particle(i).Position.x) ...
+ c2*rand(VarSize).*(GlobalBest.Position.x-particle(i).Position.x);
% Update Velocity Bounds 速度边界约束(如果超过边界 那么等于边界)
particle(i).Velocity.x = max(particle(i).Velocity.x,VelMin.x);
particle(i).Velocity.x = min(particle(i).Velocity.x,VelMax.x);
% Update Position 更新位置(上一时刻位置+这这一时刻速度)
particle(i).Position.x = particle(i).Position.x + particle(i).Velocity.x;
% Velocity Mirroring 速度镜像(我感觉不到这块有啥用)
OutOfTheRange=(particle(i).Position.x<VarMin.x | particle(i).Position.x>VarMax.x);
particle(i).Velocity.x(OutOfTheRange)=-particle(i).Velocity.x(OutOfTheRange);
% Update Position Bounds 位置边界约束
particle(i).Position.x = max(particle(i).Position.x,VarMin.x);
particle(i).Position.x = min(particle(i).Position.x,VarMax.x);
%y方向(与x方向原理一致)
% Update Velocity
particle(i).Velocity.y = w*particle(i).Velocity.y ...
+ c1*rand(VarSize).*(particle(i).Best.Position.y-particle(i).Position.y) ...
+ c2*rand(VarSize).*(GlobalBest.Position.y-particle(i).Position.y);
% Update Velocity Bounds
particle(i).Velocity.y = max(particle(i).Velocity.y,VelMin.y);
particle(i).Velocity.y = min(particle(i).Velocity.y,VelMax.y);
% Update Position
particle(i).Position.y = particle(i).Position.y + particle(i).Velocity.y;
% Velocity Mirroring
OutOfTheRange=(particle(i).Position.y<VarMin.y | particle(i).Position.y>VarMax.y);
particle(i).Velocity.y(OutOfTheRange)=-particle(i).Velocity.y(OutOfTheRange);
% Update Position Bounds
particle(i).Position.y = max(particle(i).Position.y,VarMin.y);
particle(i).Position.y = min(particle(i).Position.y,VarMax.y);
% Evaluation 评价 循环 返回路径长度Cost和 Sol(拟合点 距离 容忍度 可靠性)
[particle(i).Cost, particle(i).Sol]=CostFunction(particle(i).Position);
% Update Personal Best 更新个体最优(如果本次迭代cost小,那么记录该粒子的位置、cost、和sol信息)
if particle(i).Cost<particle(i).Best.Cost
particle(i).Best.Position=particle(i).Position;
particle(i).Best.Cost=particle(i).Cost;
particle(i).Best.Sol=particle(i).Sol;
% Update Global Best 更新全局最优(如果本次迭代cost比全局cost要小,那么保留本次cost为全局cost)
if particle(i).Best.Cost<GlobalBest.Cost
GlobalBest=particle(i).Best;
end
end
end
% Update Best Cost Ever Found
BestCost(it)=GlobalBest.Cost; %每次迭代都把种群最优路径加到BestCost中 以便生成适应度曲线
% Inertia Weight Damping
w=w*wdamp; %降低惯性 wdamp = 0.98
% Show Iteration Information 显示迭代信息
if GlobalBest.Sol.IsFeasible
Flag=' *';
else
Flag=[', Violation = ' num2str(GlobalBest.Sol.Violation)];
end
disp(['Iteration ' num2str(it) ': Best Cost = ' num2str(BestCost(it)) Flag]);
% Plot Solution
figure(1);
PlotSolution(GlobalBest.Sol,model);
pause(0.01);
endCreateModel.m
function model=CreateModel()
% Source 初始点
xs=-50;
ys=-50;
% Target 目标点
xt=45;
yt=36;
%三个障碍物
% xobs=[1.5 4.0 1.2 40];
% yobs=[4.5 3.0 1.5 32];
% robs=[1.5 1.0 0.8 1.2];
%随机生成100个障碍物
xobs=(rand(100,1)*2-1)*50; %障碍物x坐标
yobs=(rand(100,1)*2-1)*50; %障碍物y坐标
robs=rand(100,1)*3; %障碍物半径
for i=1:size(robs) %约束一下半径都大于1
if robs(i) < 2
robs(i) =robs(i)+ 1;
end
%10个中间节点
n=10;
%位置的可行域范围
xmin=-50;
xmax= 50;
ymin=-50;
ymax= 50;
%赋值给model结构体
model.xs=xs;
model.ys=ys;
model.xt=xt;
model.yt=yt;
model.xobs=xobs;
model.yobs=yobs;
model.robs=robs;
model.n=n;
model.xmin=xmin;
model.xmax=xmax;
model.ymin=ymin;
model.ymax=ymax;
endParseSolution.m
function sol2=ParseSolution(sol1,model)
%把生成的10个点的位置信息传进去
x=sol1.x;
y=sol1.y;
%初始点目标点
xs=model.xs;
ys=model.ys;
xt=model.xt;
yt=model.yt;
%障碍物
xobs=model.xobs;
yobs=model.yobs;
robs=model.robs;
XS=[xs x xt];
YS=[ys y yt];
k=numel(XS); %numel 返回 数组元素个数
TS=linspace(0,1,k); %在 0 - 1 之间等距离生成k个点(包括0 1)
tt=linspace(0,1,100); %(0,1,5000)的意思是通过样条曲线将tt(5个点)转换成5000个点
xx=spline(TS,XS,tt); %spline 三次样条插值 就是说每两个节点之间进行一次三次样条插值,插入的个数是tt(tt越大,生成的轨迹越慢,但也越详细)
yy=spline(TS,YS,tt);
%前后相邻元素之差 维度降1 用于计算距离
dx=diff(xx);
dy=diff(yy);
L=sum(sqrt(dx.^2+dy.^2)); %计算每一小段距离再求和
nobs = numel(xobs); % Number of Obstacles numel返回数组元素个数 (几个障碍物)
Violation = 0;
for k=1:nobs
d=sqrt((xx-xobs(k)).^2+(yy-yobs(k)).^2); %计算三次样条插值的 每一个点到第k个障碍物的距离之和
v=max(1-d/robs(k),0); %从 1-d/robs(k)或0 中返回最大值 返回0说明d>robs(k) 路径可行
Violation=Violation+mean(v); %mean 计算每列的平均值 大于0说明路径与障碍物相遇
end
%sol的一些数据
sol2.TS=TS;
sol2.XS=XS;
sol2.YS=YS;
sol2.tt=tt;
sol2.xx=xx;
sol2.yy=yy;
sol2.dx=dx;
sol2.dy=dy;
sol2.L=L;
sol2.Violation=Violation;
sol2.IsFeasible=(Violation==0); %Violation==0 返回 1 sol2.IsFeasible=1 证明可靠
end也没啥了吧 还有就是障碍物绘制填充什么的,在此基础上在pso中加入模拟退火算法,就形成了模拟退火粒子群算法
模拟退火-粒子群算法:
自适应模拟退火粒子群算法BSAPSO(学习笔记_03)_自适应模拟退火算法_Cloud-Lii的博客-CSDN博客自适应模拟退火粒子群算法BSAPSO(学习笔记_3)https://blog.csdn.net/weixin_49647278/article/details/122549504?utm_medium=distribute.pc_relevant.none-task-blog-2~default~baidujs_baidulandingword~default-1-122549504-blog-127769197.pc_relevant_aa&spm=1001.2101.3001.4242.2&utm_relevant_index=4

DWA算法
DWA算法就是把动态因素考虑进去的,最简单的方法就是在上面的基础上,设置一些动态障碍物,在全局路径规划完成后,进行DWA避障。DWAdemo好像挺久了,这个人写的比较全面,用的也是这个代码,只不过是加到了上面里,所以直接参考他这个自己写一份也是可以的。
DWA算法:
DWA动态窗口法的原理及应用_动态窗口法原理_gophae的博客-CSDN博客看了CSDN博客上面的各种介绍DWA的博客,就这辣鸡点击都能过万?完全是对学术的不尊重吧,还是我来写一下吧。DWA算法的核心:DWA的核心在于所谓的动态窗口,这个东西在sampling based method 中就是sampling. 对于sampling可以是去sample state,也可以sample action. 百度的lattice planner其实就是在sample sta...https://blog.csdn.net/gophae/article/details/105299926
在完成pso后,进行循环迭代DWA算法

%% 机器人的初期状态
x = [-50 -50 pi/4 0 0]';
% x下标宏定义 状态[x(m),y(m),yaw(Rad),v(m/s),w(rad/s)]
POSE_X = 1; %坐标 X
POSE_Y = 2; %坐标 Y
YAW_ANGLE = 3; %机器人航向角
V_SPD = 4; %机器人速度
W_ANGLE_SPD = 5; %机器人角速度
goal=[45 36]; %设置目标位置
global dt;
dt = 0.1;% 时间[s]
%最高速度m/s],最高旋转速度[rad/s],加速度[m/ss],旋转加速度[rad/ss],速度分辨率[m/s],转速分辨率[rad/s]]
Kinematic = [1.5,toRadian(20.0),0.2,toRadian(50.0),0.01,toRadian(1)];
%定义Kinematic的下标含义
MD_MAX_V = 1;% 最高速度m/s]
MD_MAX_W = 2;% 最高角速度[rad/s]
MD_ACC = 3;% 加速度[m/ss]
MD_VW = 4;% 旋转加速度[rad/ss]
MD_V_RESOLUTION = 5;% 速度分辨率[m/s]
MD_W_RESOLUTION = 6;% 转速分辨率[rad/s]]
% 评价函数参数 航向得分的比重、距离得分的比重、速度得分的比重、向前模拟轨迹的时间
evalParam = [0.045, 0.1 ,0.1, 3.0];
% 模拟实验的结果
result_x=[]; %累积存储走过的轨迹点的状态值
tic; % 估算程序运行时间开始
abc = 0; %循环第abc次
%% 设置纵向移动障碍物
%初始化障碍物的速度参数 在(-1,1)之间
flag_obstacle = [1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1)];
vel_obstacle = 0.1; %障碍物速度参数权值
%设置纵向障碍物的具体目标(9个)
obstacle=[model.xobs(8) model.yobs(8);
model.xobs(65) model.yobs(65);
model.xobs(63) model.yobs(63);
model.xobs(42) model.yobs(42);
model.xobs(30) model.yobs(30);
model.xobs(45) model.yobs(45);
model.xobs(37) model.yobs(37);
model.xobs(46) model.yobs(46);
model.xobs(10) model.yobs(10);];
%% 设置横向移动障碍物
%% 初始化横向移动障碍物速度参数 在(-1,1)之间
flag_obstacle_1 = [1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1) 1-2*rand(1)];
%设置横向障碍物具体目标(6个)
obstacle_1=[model.xobs(52) model.yobs(52);
model.xobs(29) model.yobs(29);
model.xobs(3) model.yobs(3);
model.xobs(2) model.yobs(2);
model.xobs(18) model.yobs(18);
model.xobs(61) model.yobs(61);];
psi_obs=ones(numel(flag_obstacle),1);
psi_obs_1=ones(numel(flag_obstacle_1),1);
%% 循环
for i = 1:5000
%对obstcle的移动计算
for j = 1:numel(flag_obstacle) %移动障碍物设定
if obstacle(j,2) > 36 && flag_obstacle(j) > 0 || obstacle(j,2) < -50 && flag_obstacle(j) < 0
flag_obstacle(j) = -flag_obstacle(j);
end
obstacle(j,2)=obstacle(j,2)+flag_obstacle(j)*vel_obstacle; %flag_obstacle(j)*vel_obstacle 变换速度
%添加obstcle的航向信息
if flag_obstacle(j)>0
psi_obs(j,1)=pi/2;
else
psi_obs(j,1)=pi*3/2;
end
end
model.yobs(8)=obstacle(1,2);
model.yobs(65)=obstacle(2,2);
model.yobs(63)=obstacle(3,2);
model.yobs(42)=obstacle(4,2);
model.yobs(30)=obstacle(5,2);
model.yobs(45)=obstacle(6,2);
model.yobs(37)=obstacle(7,2);
model.yobs(46)=obstacle(8,2);
model.yobs(10)=obstacle(9,2);
%对obstcle_1的移动计算
for j = 1:numel(flag_obstacle_1) %移动障碍物设定
if obstacle_1(j,1) > 45 && flag_obstacle_1(j) > 0 || obstacle_1(j,1) < -50 && flag_obstacle_1(j) < 0
flag_obstacle_1(j) = -flag_obstacle_1(j);
end
obstacle_1(j,1)=obstacle_1(j,1)+flag_obstacle_1(j)*vel_obstacle; %flag_obstacle(j)*vel_obstacle 变换速度
%添加obstacle_1的航向信息
if flag_obstacle_1(j)>0
psi_obs_1(j,1)=0;
else
psi_obs_1(j,1)=pi;
end
end
model.xobs(52)=obstacle_1(1,1);
model.xobs(29)=obstacle_1(2,1);
model.xobs(3)=obstacle_1(3,1);
model.xobs(2)=obstacle_1(4,1);
model.xobs(18)=obstacle_1(5,1);
model.xobs(61)=obstacle_1(6,1);
%撞上纵向移动障碍物
for l = 1:numel(flag_obstacle)
if norm(obstacle(l,:)-x(1:2)')-1 < 0
disp('==========Hit an obstacle!!=========='); %撞上障碍物
temp = 1;
break;
end
end
%撞上横向移动障碍物
for l = 1:numel(flag_obstacle_1)
if norm(obstacle_1(l,:)-x(1:2)')-1 < 0
disp('==========Hit an obstacle!!!=========='); %撞上障碍物
temp = 1;
break;
end
end
if temp == 1
break;
end
% DWA参数输入 返回控制量 u = [v(m/s),w(rad/s)] 和 轨迹
[u,traj] = DynamicWindowApproach(x,Kinematic,goal(k,:),evalParam,model,psi_obs,psi_obs_1,obstacle,obstacle_1);%算出下发速度u/当前速度u
x = f(x,u);% 机器人移动到下一个时刻的状态量 根据当前速度和角速度推导 下一刻的位置和角度
abc = abc+1;
% 历史轨迹的保存
result_x = [result_x; x']; %最新结果 以行的形式 添加到result.x, 保存的是所有状态参数值,包括坐标xy、朝向、线速度、角速度,其实应该是只取坐标就OK
% 是否到达目的地
if norm(x(POSE_X:POSE_Y)-goal(k,:)')<2 % norm函数来求得坐标上的两个点之间的距离
disp('==========Arrive Goal!!==========');break;
end
%导入PlotSolution_2绘制 动态障碍物 + 机器人模型
ArrowLength = 0.5; % 箭头长度
PlotSolution_2(traj,result_x,x,ArrowLength,GlobalBest.Sol,model);
disp(['time ' num2str(i)]); %打印
end
%% 航行时间 形式:时间已过 ** 秒。
toc;
%% 计算航迹总长度
lx_c=[-50;result_x(:,1);45];
ly_c=[-50;result_x(:,2);36];
dlx=diff(lx_c);
dly=diff(ly_c);
L_c=sum(sqrt(dlx.^2+dly.^2));
disp(['DWA航迹长度为: ' num2str(L_c)]); %打印DynamicWindowApproach.m
function [u,trajDB] = DynamicWindowApproach(x,model,goal,evalParam,model_1,psi_obs,psi_obs_1,obstacle,obstacle_1)
% Dynamic Window [vmin,vmax,wmin,wmax] 最小速度 最大速度 最小角速度 最大角速度速度
Vr = CalcDynamicWindow(x,model); % 根据当前状态 和 运动模型 计算当前的参数允许范围(最小速度 最大速度 最小角速度 最大角速度速度)
% 评价函数的计算 evalDB N*5 每行一组可用参数 分别为 速度、角速度、航向得分、距离得分、速度得分
% trajDB 每5行一条轨迹 每条轨迹都有状态x点串组成
[evalDB,trajDB]= Evaluation(x,Vr,goal,model_1,model,evalParam,psi_obs,psi_obs_1,obstacle,obstacle_1); %evalParam 评价函数参数 [heading,dist,velocity,predictDT]
if isempty(evalDB)
disp('no path to goal!!');
u=[0;0];return;
end
% 各评价函数正则化
evalDB = NormalizeEval(evalDB);
% 最终评价函数的计算
feval=[];
for id=1:length(evalDB(:,1))
feval = [feval;evalParam(1:3)*evalDB(id,3:5)']; %根据评价函数参数 前三个参数分配的权重 计算每一组可用的路径参数信息的得分 评价参数前三个指标 航向得分比重、距离得分比重、速度得分比重 X evalDB的 第三个到第五个指标 航向、距离、速度
end
evalDB = [evalDB feval]; % 最后一组;加最后一列,每一组速度的最终得分
[maxv,ind] = max(feval);% 选取评分最高的参数 对应分数返回给 maxv 对应下标返回给 ind
u = evalDB(ind,1:2)';% 返回最优参数的速度、角速度
endEvaluation.m(这块把接口写上了以便后续为所欲为 包括障碍物角度以及障碍物位置)
function [evalDB,trajDB] = Evaluation(x,Vr,goal,model_1,model,evalParam,psi_obs,psi_obs_1,obstacle,obstacle_1)
evalDB = [];
trajDB = [];
for vt = Vr(1):model(5):Vr(2) %根据速度分辨率遍历所有可用速度: 最小速度和最大速度 之间 速度分辨率 递增
for ot=Vr(3):model(6):Vr(4) %根据角度分辨率遍历所有可用角速度: 最小角速度和最大角速度 之间 角度分辨率 递增
% 轨迹推测; 得到 xt: 机器人向前运动后的预测位姿; traj: 当前时刻 到 预测时刻之间的轨迹(由轨迹点组成)
[xt,traj] = GenerateTrajectory(x,vt,ot,evalParam(4)); %evalParam(4),前向模拟时间; 得到运动后的位姿 + 这段路径
% 各评价函数的计算
heading = CalcHeadingEval(xt,goal); % 前项预测终点的航向得分 偏差越小分数越高
[dist,Flag] = CalcDistEval(xt,model_1); % 前项预测终点 距离最近障碍物的间隙得分 距离越远分数越高
vel = abs(vt); % 速度得分 速度越快分越高
stopDist = CalcBreakingDist(vel,model); % 制动距离的计算
if dist > stopDist && Flag == 0 % 如果可能撞到最近的障碍物 则舍弃此路径 (到最近障碍物的距离 大于 刹车距离 才取用)
% if Flag == 0 % 如果可能撞到最近的障碍物 则舍弃此路径 (到最近障碍物的距离 大于 刹车距离 才取用)
evalDB = [evalDB;[vt ot heading dist vel]];
trajDB = [trajDB;traj]; % 每5行 一条轨迹
end
end
end
end其他内容基本就跟上面博主写的一样了,算法很简单,一看就懂
这块说一下障碍物移动,也是参考了DWA算法的demo
在PSO随机生成障碍物的基础上,将障碍物信息保存到Excel中,然后读取的Excel数据,以便更改具体障碍物,障碍物的迭代移动demo在PlotSolution_2.m中
function PlotSolution_2(traj,result_x,x,ArrowLength,sol,model)
xs=model.xs;
ys=model.ys;
xt=model.xt;
yt=model.yt;
xobs=model.xobs;
yobs=model.yobs;
robs=model.robs;
XS=sol.XS;
YS=sol.YS;
xx=sol.xx;
yy=sol.yy;
theta=linspace(0,2*pi,100);
for k=1:numel(xobs) %填充障碍物(应该是)
fill(xobs(k)+robs(k)*cos(theta),yobs(k)+robs(k)*sin(theta),[0.5 0.7 0.8]);
hold on;
end
fill(xobs(8)+robs(8)*cos(theta),yobs(8)+robs(8)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(65)+robs(65)*cos(theta),yobs(65)+robs(65)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(63)+robs(63)*cos(theta),yobs(63)+robs(63)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(42)+robs(42)*cos(theta),yobs(42)+robs(42)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(30)+robs(30)*cos(theta),yobs(30)+robs(30)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(45)+robs(45)*cos(theta),yobs(45)+robs(45)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(37)+robs(37)*cos(theta),yobs(37)+robs(37)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(46)+robs(46)*cos(theta),yobs(46)+robs(46)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(10)+robs(10)*cos(theta),yobs(10)+robs(10)*sin(theta),[0.9373 0.4353 0.4235]);
hold on;
fill(xobs(52)+robs(52)*cos(theta),yobs(52)+robs(52)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
fill(xobs(29)+robs(29)*cos(theta),yobs(29)+robs(29)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
fill(xobs(3)+robs(3)*cos(theta),yobs(3)+robs(3)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
fill(xobs(2)+robs(2)*cos(theta),yobs(2)+robs(2)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
fill(xobs(18)+robs(18)*cos(theta),yobs(18)+robs(18)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
fill(xobs(61)+robs(61)*cos(theta),yobs(61)+robs(61)*sin(theta),[0.9294, 0.6941, 0.5137]);
hold on;
POSE_X=x(1);
POSE_Y=x(2);
YAW_ANGLE=x(3);
V_SPD=x(4);
W_ANGLE_SPD=x(5);
n=0.02;
long = 150; %船长
width = 50; %船宽
l = n*long; %n是比例
w = n*width;
% psi = psi*pi/180;
YAW_ANGLE_1 = YAW_ANGLE ;
y1 = POSE_X - (l/2)*cos(YAW_ANGLE_1);%1
x1 = POSE_Y - (l/2)*sin(YAW_ANGLE_1);
y2 = POSE_X + (l/6)*cos(YAW_ANGLE_1);%2
x2 = POSE_Y + (l/6)*sin(YAW_ANGLE_1);
y3 = POSE_X + (l/2)*cos(YAW_ANGLE_1);%3
x3 = POSE_Y + (l/2)*sin(YAW_ANGLE_1);
y5 = y1 - (w/2)*sin(YAW_ANGLE_1);%5
x5 = x1 + (w/2)*cos(YAW_ANGLE_1);
y6 = y1 + (w/2)*sin(YAW_ANGLE_1);%6
x6 = x1 - (w/2)*cos(YAW_ANGLE_1);
y4 = y2 - (w/2)*sin(YAW_ANGLE_1);%4
x4 = x2 + (w/2)*cos(YAW_ANGLE_1);
y7 = y2 + (w/2)*sin(YAW_ANGLE_1);%7
x7 = x2 - (w/2)*cos(YAW_ANGLE_1);
x = [x3 x4 x5 x6 x7 x3];
y = [y3 y4 y5 y6 y7 y3];
plot(y,x,'g','LineWidth',0.5); %画船
quiver(POSE_X, POSE_Y, ArrowLength*cos(YAW_ANGLE), ArrowLength*sin(YAW_ANGLE),'ok'); %画圆
% 绘制走过的所有位置 所有历史数据的 X、Y坐标
plot(result_x(:,1),result_x(:,2),'-b');
% 探索轨迹 画出待评价的轨迹
if ~isempty(traj) %轨迹非空
for it=1:length(traj(:,1))/5 %计算所有轨迹数 traj 每5行数据 表示一条轨迹点
ind = 1+(it-1)*5; %第 it 条轨迹对应在traj中的下标
plot(traj(ind,:),traj(ind+1,:),'-g'); hold on; %根据一条轨迹的点串画出轨迹 traj(ind,:) 表示第ind条轨迹的所有x坐标值 traj(ind+1,:)表示第ind条轨迹的所有y坐标值
end
end
plot(xx,yy,'k','LineWidth',2);
plot(XS,YS,'ro');
plot(xt,yt,'kp','MarkerSize',16,'MarkerFaceColor','g'); %终点
hold off;
grid on;
axis equal;
drawnow limitrate;
end整体demo打包到一起发吧,在此再次感谢前面几个博主的分享
代码传送门:
https://download.csdn.net/download/weixin_53293018/87679985?spm=1001.2014.3001.5503文章来源:https://www.toymoban.com/news/detail-739616.html
版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。
本文链接:https://blog.csdn.net/weixin_53293018/article/details/129802545
文章来源地址https://www.toymoban.com/news/detail-739616.html
到了这里,关于模拟退火-粒子群全局路径规划+DWA局部路径规划的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!