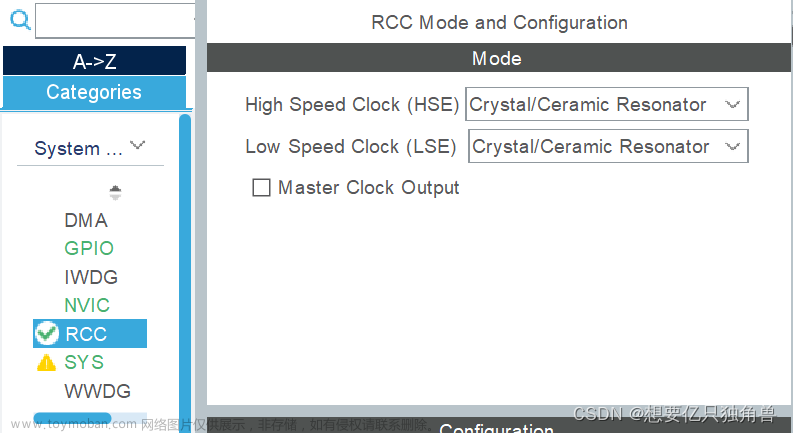
一.cubemx配置

我使用的板子是stm32f103rct6,这里我们使用串口1,选择异步模式,注意波特率的选择,一般是9600或者115200,如果波特率选择不对的话是不能进行通讯的(我小车怎么也动不了搞了好久最后发现是波特率选错了,气死了),我用的蓝牙模块是HC-05(ps:我的stm32f103rct6的板子的串口波特率时9600,stm32f407vgt6的板子的波特率是28800)


打开串口1的中断,中断优先级根据自己的实际需求选择。

这样就配置完了,连线的时候 ,注意蓝牙的RX连接PA9,TX连接PA10,不要连错了。
,注意蓝牙的RX连接PA9,TX连接PA10,不要连错了。
二.代码部分
代码直接从keil5里复制粘贴中文注释部分会乱码,过两天我再给修改一下,主函数循环前不要忘了开启串口1的接收中断。
HAL_UART_Receive_IT(&huart1,(uint8_t *)&USART1_NewData,1);Car_Move.c
#include "tim.h"
#include "Car_Move.h"
#include "gpio.h"
void Motor1Forward(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_1, speed);
}
void Motor2Forward(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_2);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_2, speed);
}
void Motor3Forward(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_3);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_3, speed);
}
void Motor4Forward(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_4);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_4, speed);
}
/************************************************/
void Motor1Stop(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8,0);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9,0);
}
void Motor2Stop(void)
{
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4,0);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5,0);
}
void Motor3Stop(void)
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13,0);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12,0);
}
void Motor4Stop(void)
{
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0,0);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1,0);
}
/*********************************************/
void Motor1Back(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_1);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_1, speed);
}
void Motor2Back(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_2);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_4,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_2, speed);
}
void Motor3Back(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_3);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_12,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_3, speed);
}
void Motor4Back(int16_t speed)
{
HAL_TIM_PWM_Start(&htim8, TIM_CHANNEL_4);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_0,GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim8, TIM_CHANNEL_4, speed);
}
/*********************************************/
void Move_Forward(uint16_t speed)
{
Motor1Forward(speed);
Motor2Forward(speed);
Motor3Forward(speed);
Motor4Forward(speed);
}
void Move_Back(uint16_t speed)
{
Motor1Back(speed);
Motor2Back(speed);
Motor3Back(speed);
Motor4Back(speed);
}
void TurnLeft(uint16_t speed)
{
Motor1Back(speed);
Motor2Forward(speed);
Motor3Back(speed);
Motor4Forward(speed);
}
void TurnRight(uint16_t speed)
{
Motor1Forward(speed);
Motor2Back(speed);
Motor3Forward(speed);
Motor4Back(speed);
}
void Move_Stop(void)
{
Motor1Stop();
Motor2Stop();
Motor3Stop();
Motor4Stop();
}
void Move_Right(uint16_t speed)
{
Motor1Forward(speed);
Motor2Back(speed);
Motor3Back(speed);
Motor4Forward(speed);
}
void Move_Left(uint16_t speed)
{
Motor1Back(speed);
Motor2Forward(speed);
Motor3Forward(speed);
Motor4Back(speed);
}
void Move_UpRight(uint16_t speed)
{
Motor1Forward(speed);
Motor4Forward(speed);
}
void Move_UpLeft(int16_t speed)
{
Motor2Forward(speed);
Motor3Forward(speed);
}
void Move_DownLeft(int16_t speed)
{
Motor1Back(speed);
Motor4Back(speed);
}
void Move_DownRight(int16_t speed)
{
Motor2Back(speed);
Motor3Back(speed);
}

Car_Move.h
#ifndef __car_move_h__
#define __car_move_h__
void Motor1Forward(int16_t speed);
void Motor2Forward(int16_t speed);
void Motor3Forward(int16_t speed);
void Motor4Forward(int16_t speed);
void Motor1Stop(void);
void Motor2Stop(void);
void Motor3Stop(void);
void Motor4Stop(void);
void Motor1Back(int16_t speed);
void Motor2Back(int16_t speed);
void Motor3Back(int16_t speed);
void Motor4Back(int16_t speed);
void Move_Forward(uint16_t speed);
void Move_Back(uint16_t speed);
void TurnLeft(uint16_t speed); //ÆÕͨÂÖ×Ó
void TurnRight(uint16_t speed); //ÆÕͨÂÖ×Ó
void Move_Stop(void);
/*Âó¿ËÄÉÄ·ÂÖ*/
void Move_Right(uint16_t speed);
void Move_Left(uint16_t speed);
void Move_UpRight(uint16_t speed);
void Move_UpLeft(int16_t speed);
void Move_DownLeft(int16_t speed);
void Move_DownRight(int16_t speed);
#endifbluetooth.c
#include "bluetooth.h"
#include "control.h"
uint8_t USART1_RX_BUF[USART1_REC_LEN];//接收缓冲,最大USART1_REC_LEN个字节
uint16_t USART1_RX_STA=0;//接收状态标记//bit15:接收完成标志,bit14~0:接收到的有效数字
uint8_t USART1_NewData;//当前串口中断接收的1个字节数据缓存
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)//串口中断回调函数
{
if(huart ==&huart1)
{
if((USART1_RX_STA&0x8000)==0)//接收未完成
{
if(USART1_NewData==0x5A)//接收到了0x5A
{
USART1_RX_STA|=0x8000; //接收完成了,将USART1_RX_STA中的bit15置1
}
else
{
USART1_RX_BUF[USART1_RX_STA&0X7FFF]=USART1_NewData; //将接收到的数据放入数组
USART1_RX_STA++; //数据长度计数加1
if(USART1_RX_STA>(USART1_REC_LEN-1))USART1_RX_STA=0;//接收数据错误,重新开始接收
}
}
HAL_UART_Receive_IT(&huart1,(uint8_t *)&USART1_NewData,1); //因为每执行完一次中断回调函数会将接收功能关闭,所以最后要再次开启中断
}
if(USART1_RX_STA&0x8000) //判断中断接受标志位(蓝牙模块使用USART1)
{
if((USART1_RX_STA&0x7FFF)==5 //判断接收数量
&& USART1_RX_BUF[0]==0xA5 //判断接接收第一个数据是不是包头0xA5
&& USART1_RX_BUF[4]==(USART1_RX_BUF[1]+USART1_RX_BUF[2]+USART1_RX_BUF[3])%0x100) //判断接受校验码是不是原数据之和低8位
{
X=USART1_RX_BUF[1]; //接受并读取蓝牙发送过来的数据
Y=USART1_RX_BUF[2];
Z=USART1_RX_BUF[3];
}
USART1_RX_STA=0; //标志位清0,准备下一次接收
}
}
bluetooth.h
#ifndef __BLUETOOTH_H__
#define __BLUETOOTH_H__
#include "main.h" //HAL库文件声明
extern UART_HandleTypeDef huart1;//声明USART2的HAL库结构体
#define USART1_REC_LEN 200//定义USART2最大接收字节数
extern uint8_t USART1_RX_BUF[USART1_REC_LEN];//接收缓冲,最大USART_REC_LEN个字节.末字节为校验和
extern uint16_t USART1_RX_STA;//接收状态标记
extern uint8_t USART1_NewData;//当前串口中断接收的1个字节数据的缓存
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart);//串口中断回调函数声明
#endif 蓝牙部分代码参考自这篇文章蓝牙小车(基于stm32f103c8t6/HAL库/CubeMX/超详细,包含代码讲解和原理图)
Control.c
#include "gpio.h"
#include "Car_Move.h"
#include "Control.h"
#include "bluetooth.h"
int X,Y,Z;
void Control(void)
{
if(Y==1)
{
Move_Forward(3000);
}
else if(Y==2)
{
Move_Back(3000);
}
else if(Z==1)
{
TurnRight(3000);
}
else if(Z==2)
{
TurnLeft(3000);
}
else if(X==1)
{
Move_Right(3000);
}
else if(X==2)
{
Move_Left(3000);
}
else
{
Move_Stop();
}
}
Control.h
#ifndef __CONTROL_H
#define __CONTROL_H
extern int X,Y,Z;
void Control(void);
#endif以上就是主要的代码了,主要我还是新手,代码有很多要改进的地方,后期我会再慢慢修改完善代码。
三.手机蓝牙调试app使用方法
蓝牙小车(基于stm32f103c8t6/HAL库/CubeMX/超详细,包含代码讲解和原理图)
还是这篇文章,文章后半部分详细地讲解了app的使用方法。文章来源:https://www.toymoban.com/news/detail-739711.html
(本片文章主要用于记录我的代码和其他一些东西以提醒我自己)文章来源地址https://www.toymoban.com/news/detail-739711.html
到了这里,关于stm32蓝牙遥控小车(hal库)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!