目录
电机和驱动器
直流电机
有刷电机驱动器
无刷电机驱动器
步进电机
步进电机驱动器
伺服电机
伺服电机驱动器
舵机
电机和驱动器
电机是一种可以在电能和机械能间相互转换的设备。(发电机是将机械能转换为电能,电动机是将电能转换为机械能)。
主要有直流电机、步进电机、伺服电机、舵机。
直流电机
直流有刷电机
直流有刷减速电机
直流无刷电机
直流无刷减速电机
直流电机的结构由定子和转子组成。
直流电机运行时静止的部分为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。
直流电机运行时转动的部分为转子(电枢),转子的主要作用是产生电磁转矩和感应电动势,是直流电机进行能量转换的枢纽,由转轴、电枢铁芯、电枢绕组、换向器和风扇等组成。
直流电机和直流减速电机的区别在于:直流减速电机拥有减速齿轮组。
普通的直流电机空载时,电机转速由电压决定;
直流减速电机直流减速电机,电机转速由减速齿轮组和电压决定。
减速齿轮组的作用是提供较低的转速,较大的力矩。不同的减速比提供不同的转速和力矩。
直流有刷电机和直流无刷电机的区别:直流有刷电机有碳刷。
直流有刷电机工作时需要线圈和换向器旋转,碳钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换向器和电刷完成。
直流无刷电机是采用半导体开关器件来实现电子换向,使用电子开关器件代替传统的接触式换向器和电刷。

有刷电机驱动器
本质上是使用H桥电路进行驱动,核心电路H桥加上一些必要的外围电路,共同组成直流有刷电机的驱动器。H桥本身可作为集成电路使用,也可由分立元件构成。
集成电路形式的H桥一般用于中小功率需求的应用,或者是对电路面积有要求的场合。
分立元件形式的H桥一般用于大、超大功率需求的应用,主要由MOSFET或IGBT晶体管组成。
MCU的引脚是无法直接驱动MOS管等元件的,需要加上专用的MOS管驱动芯片。如直流有刷电机驱动芯片L298N,内部集成了两个H桥。
无刷电机驱动器
无刷电机也是使用H桥电路进行驱动的,只不过是电机的每一相都用一个半桥电路驱动,一个三相无刷电机总共需要三个半桥,而不像直流有刷电机驱动使用全桥电路。
H桥本身可作为集成电路使用,也可由分立元件构成。但因为无刷电机需要换相操作,就算是分立元件形式也只是把半桥电路给独立了出来。
步进电机
步进电机是一种可以将脉冲信号转换为角位移或线位移的开环控制电机。在空载低频时,一个脉冲就是一步,可以精准的控制旋转角度。
| 构造方式 | 特性 |
| 反应式 | 结构简单、成本低、步矩角小,可达1.2°。但动态性能差、效率低、发热大、可靠性难保证 |
| 永磁式 | 动态性能好、输出力矩大。但电机精度差,步矩角大(一般为7.5°或15°) |
| 混合式 | 动态性能好、输出力矩大,步矩角小。但结构复杂、成本相对较高 |
按照定子的绕组可分为二相、三相、五相等系列。主流是两相混合式步进电机(基本上占据整个市场)。
42、57、86步进电机,数字代表步进的尺寸。混合式步进电机一般都是正方形。如42步进电机外框尺寸为42mm*42mm。
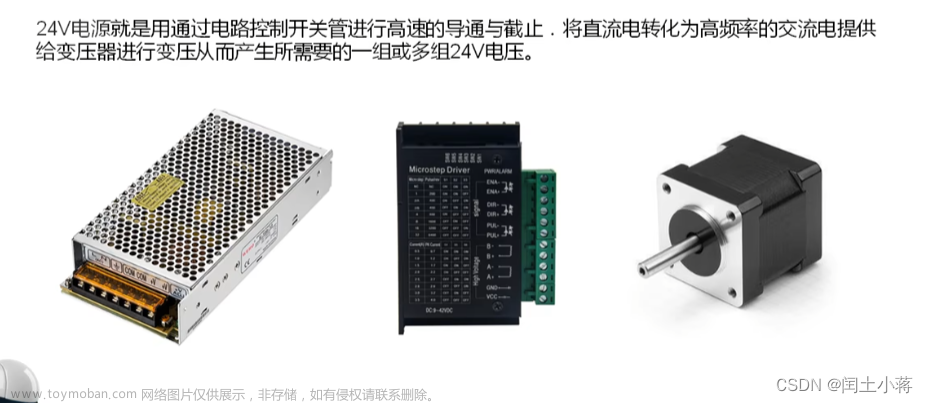
步进电机驱动器
步进电机不能直接接到直流或交流电源上工作,必须接入专用的驱动器才能正常使用。
控制器将步进脉冲和方向信号发送到步进电机驱动器,驱动器将控制器发来的步进脉冲信号转换为激励步进电动机旋转所需的功率信号。
步进电机驱动器通常都带有细分功能,可以对步距角和电流进行细分,从而实现更精准的控制和更低的噪声震动。
伺服电机
伺服电机是指在伺服系统中被控制的电机。如果单指一个电机,那只能算一个被控的机械元件,加上闭环系统可以称为伺服系统中的电机。
主要特点:当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
直流伺服电机
交流伺服电机
直流伺服电机特性:
机械特性:在输入的电枢电压保持不变时,电机的转速随电磁转矩变化而变化的规律。
调节特性:直流电机在一定的电磁转矩(或负载转矩)下电机的稳态转速随电枢的控制电压变化而变化。
动态特性(直流电机):从原来的稳定状态到新的稳定状态,存在一个过渡过程。
交流伺服电机特性:
无电刷和换向器,因此工作可靠,对维护和保养要求低。
定子绕组散热比较方便。
惯量小,易于提高系统的快速性。
适应于高速大力矩工作状态。
伺服电机驱动器
一种用来驱动和控制伺服电机的控制器,属于伺服系统的一部分。
伺服电机驱动器接收和放大来自控制系统的命令信号,并将电流传输给伺服电机,以产生与命令信号成比例的运动。这些命令信号通常对伺服电机的位置、速度和力矩等参数进行控制,实现高精度的传动系统定位。附在伺服电机上的传感器将电机的实际状态反馈给伺服驱动器,驱动器将实际电机状态与来自控制系统的命令状态进行比较。然后驱动器改变传给电机的电压、频率或脉冲宽度,以纠正任何偏离命令的状态。
舵机
常见的伺服电机,由小型直流电机、控制电路板、电位计和齿轮组构成。舵机分90°、180°、270°、360°,180°的舵机最为常见
按照信号类型划分:模拟信号舵机、数字信号舵机。
模拟信号舵机:无MCU微控制器,电路为模拟电路,同样的舵机间会有性能差异。
数字信号舵机:有MCU微控制器,一般内部采用算法优化,性能比模拟信号舵机好。
按照齿轮类型划分:金属齿轮舵机、塑料齿轮舵机。
金属齿轮舵机:适用于大扭矩和高速场合。文章来源:https://www.toymoban.com/news/detail-741706.html
塑料齿轮舵机:适用于中低扭矩场合,成本低。文章来源地址https://www.toymoban.com/news/detail-741706.html
到了这里,关于电机应用-电机与驱动器简介的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!