1、分立式机载电子系统:由多个不同并且分别独立的子系统采用离散的形式构成,采用点对点的方式进行链接,各个子系统间无法交互大量通信信息;
2、联合式机载电子系统:开始通过总线传递信息,相对更便于维护保养,易于对功能进行更改与拓展;
3、综合式机载电子系统:各模块在结构与功能上都是独立的,由综合处理机根据各模块管理任务、调动算法、性能计算等因素综合考虑来运行,性能进一步提升;
4、先进综合式机载电子系统:使用统一的机载电子系统网络,与射频、光电与孔径传感器系统综合,是高度综合化的机载电子系统,性能较前几代有了显著提高,已成为现代机载电子系统的主要形式,如著名的“宝石台”计划。
机载电子系统的数据总线作为数据通信最为重要的纽带,是现代机载系统的“中枢神经”,系统内各设备之间的数据交互和通信都是通过数据总线实现的,能够有效帮助各个设备通过对资源进行共享和管理,实现终端设备功能最大化,同时提高系统内部通信的稳定性和可靠性,所以研究机载电子系统的核心和关键课题就是研究机载电子系统的总线技术。
航空电子接口控制文件(Interface Control Document,ICD),作为系统规范中所定义的电器电子接口详细说明,定义了机载电子系统所属部分彼此之间及与非系统所属部分之间的接口,是机载电子系统规范的重要组成部分,能够作为直接评价机载电子系统优劣的依据,用于确保飞机各系统之间的兼容性与一致性,能够有效规避飞行风险。ICD具体在飞机中的体现有:用于通信的ICD总线及用于测试与验证的ICD工具。
ICD通常是十分庞杂的,所有被管理的子系统之间接口的综合报告作为格式化的ICD,能够为特殊的自动软件编码、布线清单检查、接口验证、更改建议等生成各种形式的ICD。机载电子系统的ICD可分为三个部分:2组数字数据与1组物理接口介绍,包含ICD总线上的数据流和各类离散线上的信号,且数据与信号之间具有一定关联性;格式上表现为两大类基本数据:块(Blocks)与信号(Signals),是多对多的关系。
仿真技术是随着20世纪40年代后期计算机技术的发展逐渐形成的一种技术,由于其安全性、高效率、可控性、无损性、经济性与环保自由度已得到广泛应用。尤其从经济性角度出发,根据相关统计数据显示,机载电子系统仿真的使用能够降低30%—60%的开发成本,减少10%—40%的食盐数量,缩短30%—40%的开发周期,使项目的研制开发效率得到极高提升。将仿真与ICD相结合,便能够通过验证消息数据一致性来完成现实中成本高昂的子系统测试。
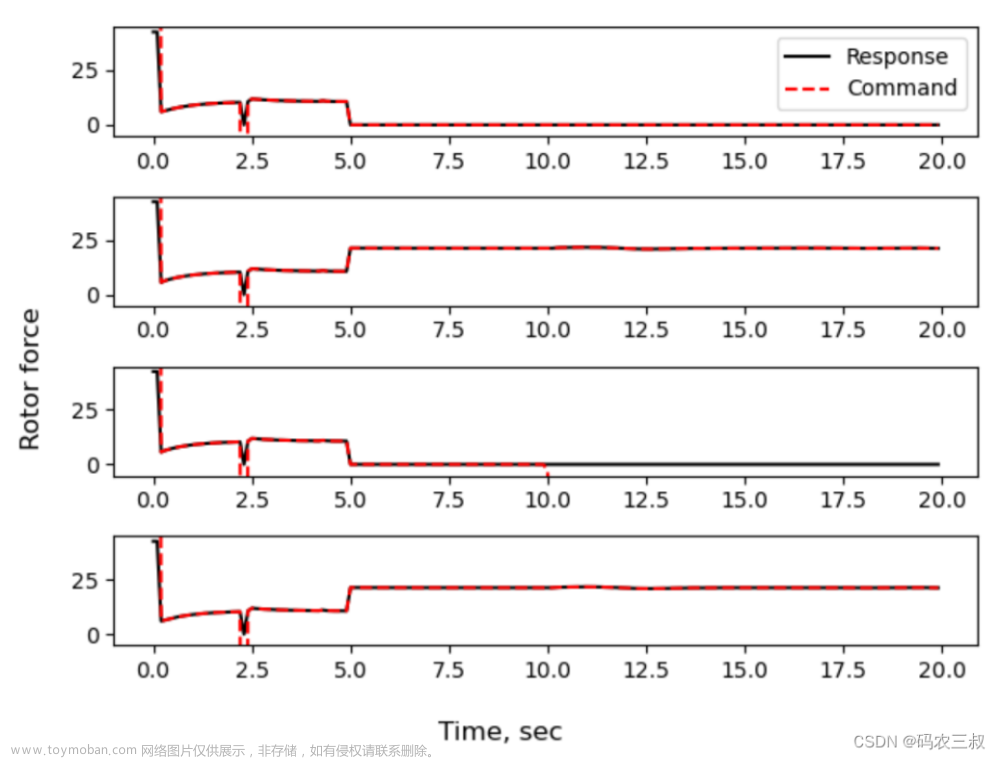
下文所示案例主要涉及集成了ICD工具的测试上位机与基于天目全数字实时仿真软件SkyEye搭建的子系统仿真模型。上位机与仿真模型通过ICD数据总线进行数据交互。在具体操作上,用户可通过自定义ICD工具报文字段的方式来测试所需验证的子系统,实现基于SkyEye的飞机各子功能针对性测试,具体如下图所示:

▲SkyEye飞机ICD工具测试案例
在实际操作中,提前对子系统进行仿真不仅能够完成高安全、高效率、低成本的子系统测试,还能够对后续的过程分析与故障排除提供帮助。
机载电子系统仿真在近几十年的中国航空工业的发展中发挥了重要作用,其应用技术的发展已成为提高飞机综合性能最重要也是最高效的方式。
参考文献
[1] 夏庆梅,徐亚军,熊华钢."航空电子接口控制文件的数据库管理." 航空计算技术 .03(2001):39-42+45.
[2] 杨鑫,and 张孟."基于MBSE方法论的ICD设计思想".第九届中国航空学会青年科技论坛论文集.Ed.中国航空学会. 中航出版传媒有限责任公司(China Aviation Publishing & Media CO.,LTD.), 2020, 612-615.文章来源:https://www.toymoban.com/news/detail-741829.html
[3] 徐士博.基于FC协议的航电任务系统仿真.2018.电子科技大学,MA thesis.文章来源地址https://www.toymoban.com/news/detail-741829.html
到了这里,关于基于仿真的飞机ICD工具测试的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!