无人机山地路径规划算法:改进的A*算法
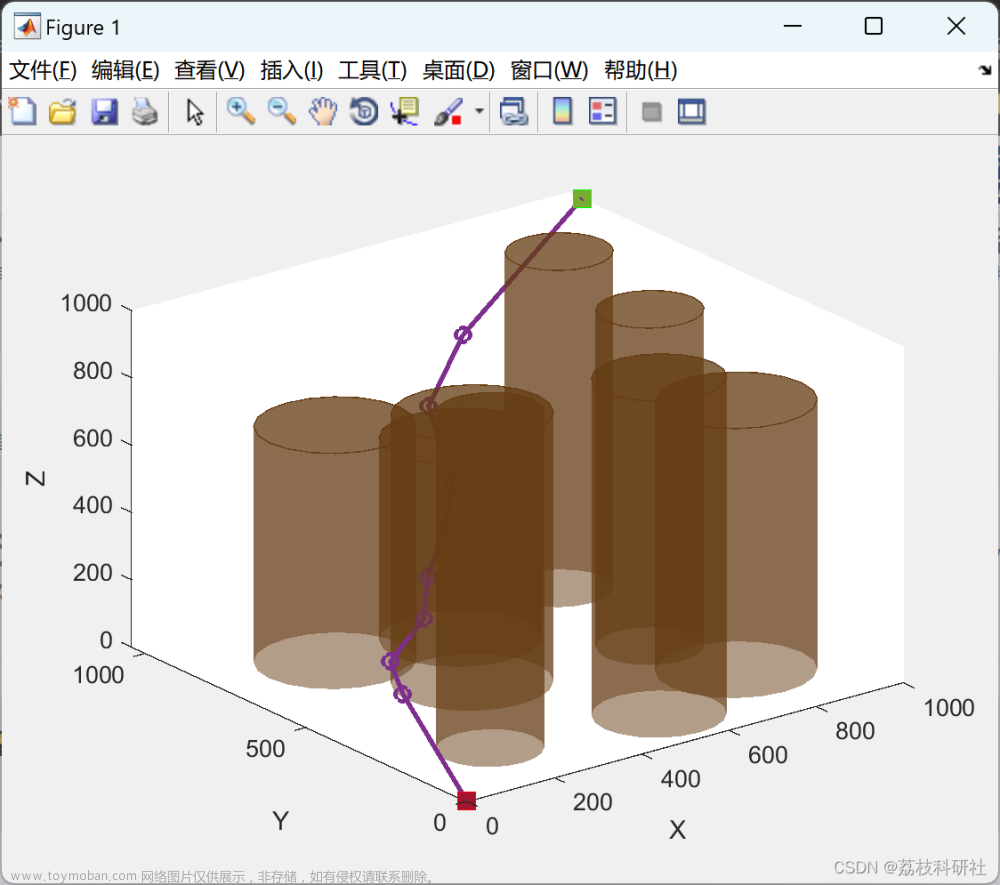
无人机在山地环境中的路径规划是一个具有挑战性的问题,因为山地地形的复杂性和不可预测性。为了有效地规划无人机在山地中的路径,我们可以采用改进的A*算法。
A*算法是一种常用的启发式搜索算法,它能够找到从起点到目标点的最短路径。该算法在每一步选择下一步的扩展节点时,综合考虑了节点的代价和启发式函数的估计值。在无人机山地路径规划中,我们可以将地形的高度作为代价,并结合启发式函数来估计下一步的最佳选择。文章来源:https://www.toymoban.com/news/detail-742397.html
以下是使用MATLAB实现的改进A*算法的源代码:文章来源地址https://www.toymoban.com/news/detail-742397.html
function path = A_star(start, goal, map)
[height, width] = size(map)到了这里,关于无人机山地路径规划算法:改进的A*算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!




](https://imgs.yssmx.com/Uploads/2024/04/861235-1.png)