多机器人仓储巡逻路径规划——基于MATLAB的A*算法
概述:
多机器人仓储巡逻路径规划是一个重要的问题,涉及到如何利用多个机器人在仓储环境中进行高效的巡逻任务。本文将介绍如何使用MATLAB编程语言实现基于A*算法的多机器人仓储巡逻路径规划。
A算法简介:
A算法是一种常用的启发式搜索算法,用于在图形网络中找到两个节点之间的最短路径。它结合了广度优先搜索和贪婪最佳优先搜索的优点,通过评估函数来选择最有希望的节点进行搜索。
问题建模:
在多机器人仓储巡逻问题中,我们需要考虑以下因素:文章来源:https://www.toymoban.com/news/detail-742493.html
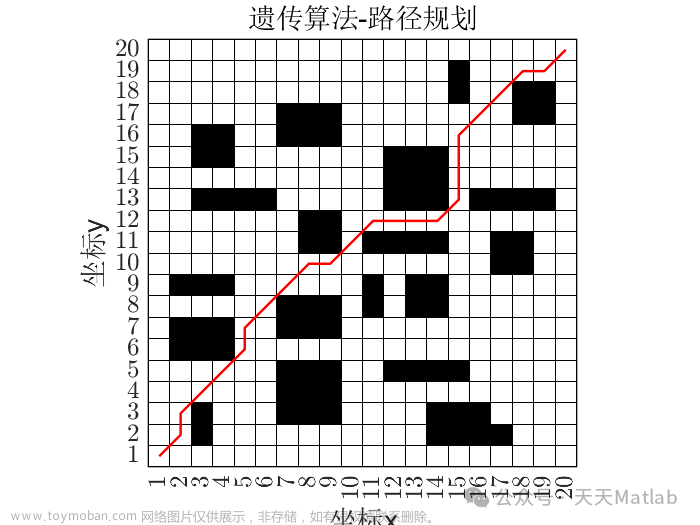
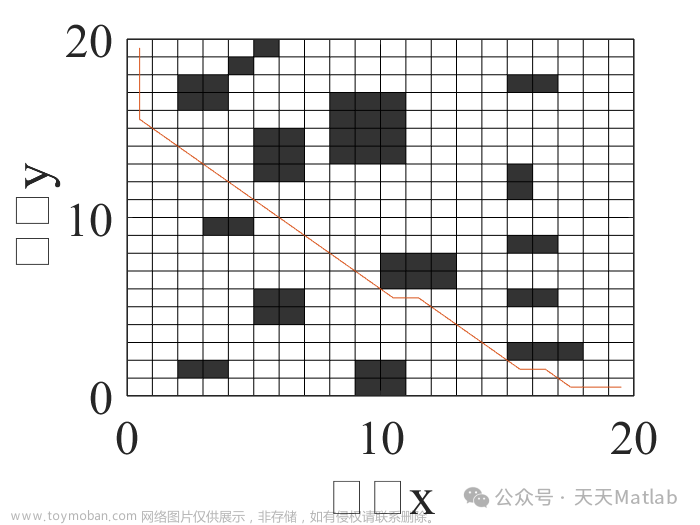
- 仓储环境:将整个仓储区域建模为一个二维网格图,每个网格单元表示一个可行走的位置。我们可以使用0/1矩阵表示地图,其中0表示可行走的位置,1表示障碍物。
- 机器人:每个机器人在地图上占据一个网格单元,机器人可以朝上、下、左、右四个方向移动,但不能穿越障碍物。
- 目标位置:每个机器人都有一个固定的目标位置,需要找到一条最短路径来从当前位置移动到目标位置。
MATLAB代码实现:
下面是基于MATLAB的A*算法的多机器人仓储巡逻路径规划的示例代码。文章来源地址https://www.toymoban.com/news/detail-742493.html
% 定义地图
map = [0, 0到了这里,关于多机器人仓储巡逻路径规划——基于MATLAB的A*算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!