在STM32中HAL库使用PWM功能需要配置什么函数文章来源地址https://www.toymoban.com/news/detail-742637.html
-
HAL_TIM_PWM_Init():初始化PWM定时器。 -
HAL_TIM_PWM_ConfigChannel():配置PWM输出通道的参数,如通道号、极性、占空比等。 -
HAL_TIM_PWM_Start():开始PWM输出。 -
HAL_TIM_PWM_Stop():停止PWM输出。 - 同时,还需要配置GPIO引脚的功能,将其配置为对应的PWM输出模式。
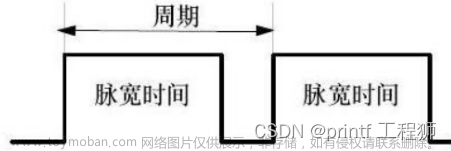
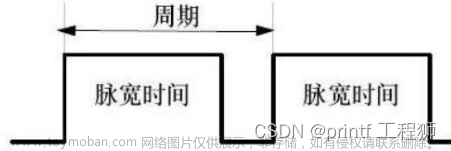
- __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__):修改占空比
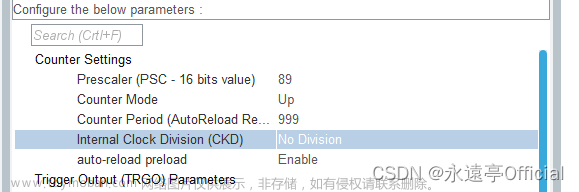
- __HAL_TIM_SET_PRESCALER(__HANDLE__, __PRESC__):修改PSC
文章来源:https://www.toymoban.com/news/detail-742637.html
到了这里,关于【STM32】HAL库配置PWM功能的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!