操作环境:
MATLAB 2022a
1、算法描述
动态窗口法(Dynamic Window Approach,DWA)是一种局部路径规划算法,常用于移动机器人的导航和避障。这种方法能够考虑机器人的动态约束,帮助机器人在复杂环境中安全、高效地移动。下面是DWA算法的详细描述:
1. 动态窗口的概念
动态窗口法的核心概念是“动态窗口”,这是在速度空间中划定的一个区域。这个窗口的大小和位置取决于机器人当前的速度以及其动态约束(如最大加速度、最大速度等)。动态窗口包含了机器人在下一时刻可能达到的所有速度状态。
2. 速度样本
算法在动态窗口内对速度进行采样,生成一系列可能的速度状态(线速度和角速度的组合)。每个速度样本对应一个可能的机器人运动轨迹。
3. 轨迹生成
对于每个速度样本,算法会生成一条预测的运动轨迹。这个轨迹是基于机器人的运动学模型计算得到的,它表示了如果机器人以这个速度状态移动,未来一段时间内它的位置和方向将如何变化。
4. 轨迹评价
生成的轨迹需要根据一定的标准进行评价。这些评价标准通常包括:
- 目标方向:轨迹是否朝向目标?
- 避障能力:轨迹是否能够避开障碍物?
- 速度:轨迹是否能够以较高的速度移动?
根据这些标准,算法会为每条轨迹分配一个评分。
5. 选择最优轨迹
根据轨迹评分,算法选择分数最高的轨迹,并将对应的速度状态作为机器人在下一时刻的控制命令。
6. 执行控制命令
机器人接收控制命令,调整其速度状态,向最优轨迹方向移动。
7. 循环迭代
DWA算法在机器人运动过程中不断重复上述步骤,以实现实时的路径规划和避障。
优点与缺点
优点:
- 能够考虑机器人的动态约束。
- 实时性好,适用于动态环境中的避障。
缺点:
- 依赖于准确的运动学模型和环境信息。
- 在某些复杂环境中可能会出现局部最优解问题。
总体来说,动态窗口法是一种高效且可靠的局部路径规划算法,适用于许多需要快速响应和避障的移动机器人应用场景。
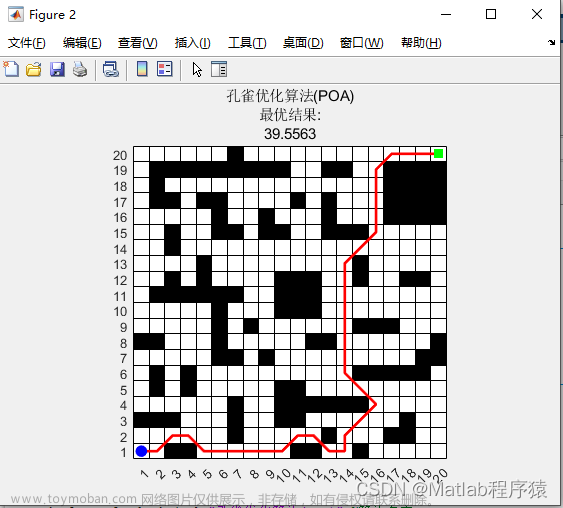
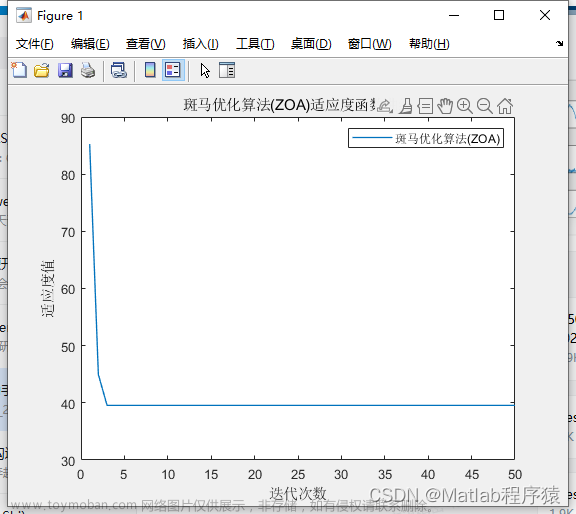
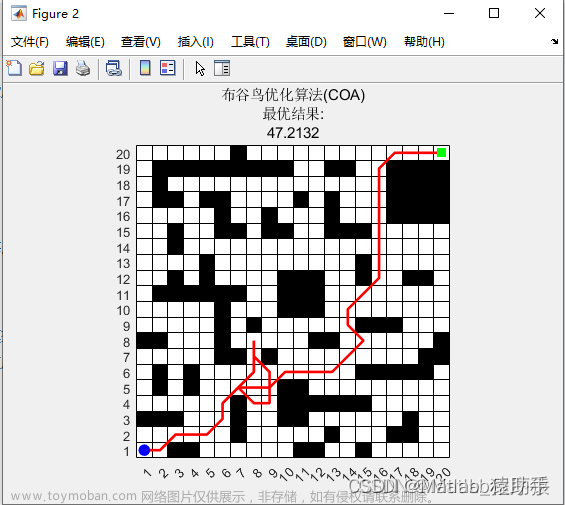
2、仿真结果演示

3、关键代码展示
略
4、MATLAB 源码获取
V 文章来源:https://www.toymoban.com/news/detail-742752.html
点击下方名片文章来源地址https://www.toymoban.com/news/detail-742752.html
到了这里,关于【MATLAB源码-第64期】matlab基于DWA算法的机器人局部路径规划包含动态障碍物和静态障碍物。的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!