均值滤波算法是一种简单的图像滤波方法,它使用一个固定大小的滤波器来平滑图像。该滤波器由一个矩形的窗口组成,窗口中的像素值取平均值作为中心像素的新值。以下是均值滤波算法的步骤:
- 定义滤波器的大小(窗口大小),通常是一个正方形或矩形。
- 遍历图像中的每个像素。
- 对于每个像素,获取其周围邻域内所有像素的值。
- 计算邻域像素值的平均值。
- 将平均值赋给当前像素。
- 重复步骤2-5,直到遍历完整个图像。
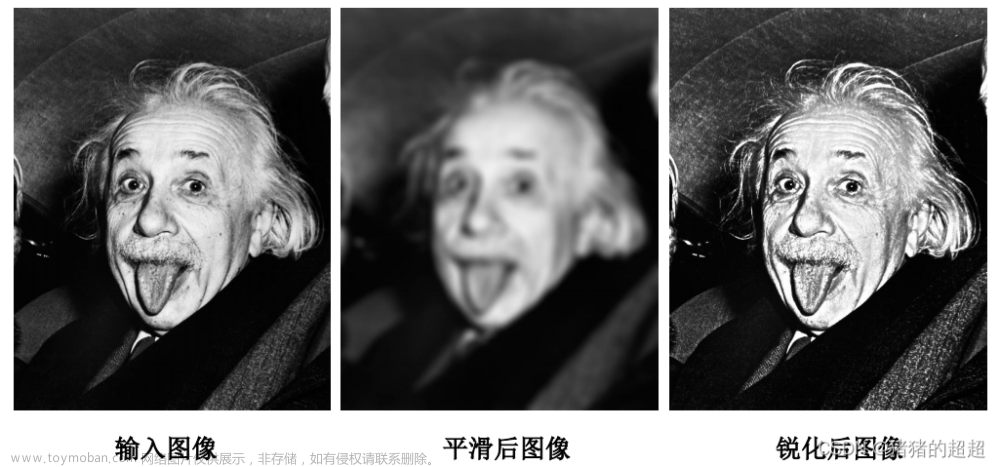
这样可以在一定程度上平滑图像并减少噪声的影响。然而,均值滤波器会模糊图像边缘和细节信息,因此在某些情况下可能不适用。在实际应用中,我们可以根据需求选择合适的滤波器大小,较小的滤波器尺寸可以更好地保留图像细节,但对噪声的抑制效果相对较差,而较大的滤波器尺寸可以更好地平滑图像,但可能模糊细节。
需要注意的是,上述步骤描述的是一种基本的二维均值滤波算法,还有其他变种如分块均值滤波等。实际应用中,也可以使用不同的滤波器权重来加权平均邻域像素的值,以进一步调整滤波效果。
下面是一个示例代码,展示了如何使用Python进行均值滤波:
import cv2
import numpy as np
def mean_filter(image, kernel_size):
# 获取图像的宽度和高度
height, width = image.shape[:2]
# 创建一个与原图像相同大小的空白图像
filtered_image = np.zeros_like(image)
# 计算均值滤波的卷积核大小
kernel_half = kernel_size // 2
# 对图像进行遍历
for i in range(height):
for j in range(width):
# 获取每个像素的周围邻域像素
neighborhood = image[max(0, i - kernel_half):min(height, i + kernel_half + 1),
max(0, j - kernel_half):min(width, j + kernel_half + 1)]
# 计算邻域像素的平均值,并赋值给当前像素
filtered_image[i, j] = np.mean(neighborhood)
return filtered_image
# 读取图像
image = cv2.imread('input.jpg', 0) # 以灰度图像方式读取
# 应用均值滤波器
filtered_image = mean_filter(image, kernel_size=3)
# 显示原图像和滤波后的图像
cv2.imshow('Original Image', image)
cv2.imshow('Filtered Image', filtered_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
在这个例程中,我们首先导入了cv2和numpy库,然后定义了一个名为mean_filter的函数,该函数接受一个图像和一个滤波器大小作为参数,并返回滤波后的图像。接下来,我们读取了输入图像,并使用mean_filter函数对图像进行均值滤波操作。最后,我们使用cv2.imshow函数显示原图像和滤波后的图像,并使用cv2.waitKey和cv2.destroyAllWindows等函数来管理窗口显示和关闭。文章来源:https://www.toymoban.com/news/detail-743861.html
请确保在运行示例代码前,将'input.jpg'替换为你自己的图像文件路径。文章来源地址https://www.toymoban.com/news/detail-743861.html
到了这里,关于均值滤波算法及例程的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!