李雅普诺夫稳定性 Lyapunov Stability
2023年10月29日
1. 简介
平衡状态 描述系统状态的随时间的运动可以用以下的式子:
x
˙
=
f
(
x
,
t
)
\dot x=f(x,t)
x˙=f(x,t)
式中
x
x
x 是状态向量,
f
(
x
,
t
)
f(x,t)
f(x,t) 是关于状态与时间的函数。当系统状态不再变化的时候,状态变量的导数应为0,即:
x
˙
=
0
=
f
(
x
e
,
t
)
\dot x=0=f(x_e,t)
x˙=0=f(xe,t)
状态运动方程的解可以写为:
x
(
t
)
=
ϕ
(
t
;
x
0
,
t
0
)
x(t)=\phi(t; x_0,t_0 )
x(t)=ϕ(t;x0,t0)
表示系统从初始状态
x
0
x_0
x0 开始的一条轨迹。
对于线性定常系统
x
˙
=
A
x
\dot x=Ax
x˙=Ax ,其平衡状态方程是
A
x
e
=
0
Ax_e=0
Axe=0。这时联想一下矩阵方程解的情况:当A为非奇异矩阵时,平衡状态方程有唯一解
x
e
=
0
x_e=0
xe=0;当A为奇异矩阵时,平衡状态方程有无穷多解,即无穷多个平衡状态。
对于非线性系统来说,系统可能存在不止一个平衡状态.
如果平衡状态彼此间是孤立的,也就是说,在某一个平衡状态的充分小的邻域内不存在其他平衡状态,则称该平衡状态为孤立平衡状态。对于孤立平衡状态,总可以经过适当的平移坐标变换.将它变换到状态空间原点.所以在下文的稳定性讨论中,经常以原点作为平衡状态来讨论系统的稳定性。
设
x
e
x_e
xe 是系统的孤立平衡状态,如果对于每个实数
ϵ
>
0
\epsilon>0
ϵ>0 ,都存在另一个实数
δ
(
ϵ
,
t
0
)
\delta(\epsilon, t_0)
δ(ϵ,t0) ,使得从满足不等式
∣
∣
x
0
−
x
e
∣
∣
≤
δ
(
ϵ
,
t
0
)
||x_0-x_e||\le\delta(\epsilon,t_0)
∣∣x0−xe∣∣≤δ(ϵ,t0)
的任意初始状态
x
0
x_0
x0 出发的状态运动
ϕ
(
t
;
x
0
,
t
0
)
\phi(t;x_0,t_0)
ϕ(t;x0,t0) 对所有时间
t
>
t
0
t>t_0
t>t0 都满足
∣
∣
ϕ
(
t
;
x
0
,
t
0
)
−
x
e
∣
∣
≤
ϵ
||\phi(t;x_0,t_0)-x_e||\le\epsilon
∣∣ϕ(t;x0,t0)−xe∣∣≤ϵ
则称
x
e
x_e
xe 是在李雅普诺夫意义下稳定的。
再用汉语来描述就是:从一个离平衡点不远的平衡点出发.之后运动到任意时刻,状态与平衡点的距离都是有限的。对应于小球曲面模型,小球在最低点附近往复运动和最终静止在平衡点这两种情况都是稳定的,而飞出去的情况就不是稳定的。
李雅普诺夫意义下,临界稳定也是稳定。极点全在s域左半平面为渐进稳定。
渐近稳定
如果孤立平衡状态
x
e
x_e
xe 不仅是稳定的,而且当时间趋向无穷时,状态运动
ϕ
(
t
;
x
0
,
t
0
)
\phi(t;x_0,t_0)
ϕ(t;x0,t0) 无限趋近平衡状态αe ,则称平衡状态
x
e
x_e
xe 是渐进稳定的。
大范围渐进稳定/全局渐近稳定
如果
x
e
x_e
xe 是渐进稳定的,而且从状态空间中所有初始状态出发的轨线都具有渐进稳定性,那么
x
e
x_e
xe 被称为全局渐进稳定的平衡状态,或被称为大范围渐进稳定的平衡状态。
一致稳定
如果
δ
(
ϵ
,
t
0
)
\delta(\epsilon, t_0)
δ(ϵ,t0) 与初始时刻t的选择无关,则称平衡状态
x
e
x_e
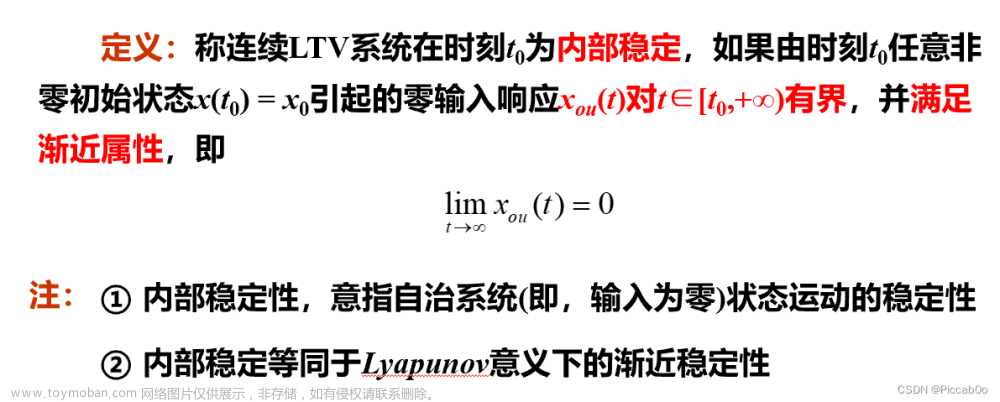
xe 是一致稳定的。定常系统的稳定等价于一致稳定;时变系统稳定不一定一致稳定。
2. 李雅普诺夫第一法
李雅普诺夫第一法的基本思路是:将非线性系统在平衡点附近进行线性化处理(泰勒展开),导出一个近似的一次线性化系统,根据这个线性化系统的特征值来推断非线性系统在平衡点附近的稳定性。解题过程分为三部:
- 求稳定点
- 在稳定点附近线性化
- 根据线性化系统的系统矩阵特征值给出结论
令状态变量导数为0,可以解出平衡状态。
{
x
˙
=
f
(
x
,
u
)
y
=
g
(
x
)
\left\{\begin{array}{l l}{{\dot{x}}=f(x,u)}\\ {y=g(x)}\end{array}\right.
{x˙=f(x,u)y=g(x)
{
Δ
x
˙
=
∂
f
∂
x
∣
x
0
,
u
0
Δ
x
+
∂
f
∂
u
∣
x
0
,
u
0
Δ
u
Δ
y
=
∂
g
∂
x
∣
x
0
,
u
0
\left\{\begin{array}{l}{{\Delta\dot{x}=\left.\frac{\partial f}{\partial x}\right|_{x_{0},u_{0}}\left.\Delta x+\frac{\partial f}{\partial u}\right|_{x_{0},u_{0}}\Delta u}}\\ {{\Delta y=\left.\frac{\partial g}{\partial x}\right|_{x_{0},u_{0}}}}\end{array}\right.
⎩
⎨
⎧Δx˙=∂x∂f
x0,u0Δx+∂u∂f
x0,u0ΔuΔy=∂x∂g
x0,u0
{
Δ
x
˙
=
A
Δ
x
+
B
Δ
u
Δ
y
=
C
Δ
x
\left\{\begin{array}{l l}{\Delta\dot{x}=A\Delta x+B\Delta u}\\ {\Delta y=C\Delta x}\end{array}\right.
{Δx˙=AΔx+BΔuΔy=CΔx
Jacobi矩阵:
∂
f
∂
x
=
[
∂
f
1
∂
x
1
∂
f
1
∂
x
2
⋯
∂
f
1
∂
x
n
∂
f
2
∂
x
1
∂
f
2
∂
x
2
⋯
∂
f
2
∂
x
n
⋮
⋮
⋱
⋮
∂
f
n
∂
x
1
∂
f
n
∂
x
2
⋯
∂
f
n
∂
x
n
]
\frac{\partial f}{\partial x}=\begin{bmatrix}\frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}&\cdots&\frac{\partial f_1}{\partial x_n}\\\frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}&\cdots&\frac{\partial f_2}{\partial x_n}\\\vdots&\vdots&\ddots&\vdots\\\frac{\partial f_n}{\partial x_1}&\frac{\partial f_n}{\partial x_2}&\cdots&\frac{\partial f_n}{\partial x_n}\end{bmatrix}
∂x∂f=
∂x1∂f1∂x1∂f2⋮∂x1∂fn∂x2∂f1∂x2∂f2⋮∂x2∂fn⋯⋯⋱⋯∂xn∂f1∂xn∂f2⋮∂xn∂fn
系统的特征值与A矩阵有关,因此只需要求
∂
f
/
∂
x
\partial f/\partial x
∂f/∂x 并代入平衡点即可。
根据线性化系统的A矩阵特征值给出结论:
- A矩阵的特征值均有负实部→系统在平衡点处渐进稳定
- A矩阵的特征值存在正实部→系统在平衡点处不稳定
- A矩阵的特征值有为零的实部但无正实部→无法判断稳定性,必须分析高次项
[!note]- example
{ x ˙ 1 = − x 1 + x 2 + x 2 2 x ˙ 2 = − 2 x 2 + x 1 4 \begin{cases}\dot{x}_1=-x_1+x_2+x_2^2\\\dot{x}_2=-2x_2+x_1^4&\end{cases} {x˙1=−x1+x2+x22x˙2=−2x2+x14
解:
A = ∂ f ∂ x ∣ x = 0 = [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ] x = 0 = [ − 1 1 + 2 x 2 4 x 1 3 − 2 ] x = 0 = [ − 1 1 0 − 2 ] \left.A=\frac{\partial f}{\partial x}\right|_{x=0}=\begin{bmatrix}\frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}\\\frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}\end{bmatrix}_{x=0}=\begin{bmatrix}-1&1+2x_2\\4x_1^3&-2\end{bmatrix}_{x=0}=\begin{bmatrix}-1&1\\0&-2\end{bmatrix} A=∂x∂f x=0=[∂x1∂f1∂x1∂f2∂x2∂f1∂x2∂f2]x=0=[−14x131+2x2−2]x=0=[−101−2]
两个特征根-1,-2均为负实数,所以原点是局部渐近稳定的平衡状态
[!note]- example
{ x ˙ 1 = − x 1 + x 1 x 2 x ˙ 2 = − x 2 + 2 x 1 − x 1 2 \begin{cases}\dot{x}_1=-x_1+x_1x_2\\\dot{x}_2=-x_2+2x_1-x_1^2&\end{cases} {x˙1=−x1+x1x2x˙2=−x2+2x1−x12
解:系统的Jacobi矩阵
∂ f ∂ x = [ ∂ f 1 ∂ x 1 ∂ f 1 ∂ x 2 ∂ f 2 ∂ x 1 ∂ f 2 ∂ x 2 ] = [ − 1 + x 2 x 1 2 − 2 x 1 − 1 ] \frac{\partial{f}}{\partial{x}}=\begin{bmatrix}\frac{\partial f_1}{\partial x_1}&\frac{\partial f_1}{\partial x_2}\\\frac{\partial f_2}{\partial x_1}&\frac{\partial f_2}{\partial x_2}\end{bmatrix}=\begin{bmatrix}-1+x_2&x_1\\2-2x_1&-1\end{bmatrix} ∂x∂f=[∂x1∂f1∂x1∂f2∂x2∂f1∂x2∂f2]=[−1+x22−2x1x1−1]
将原点代入Jacobi矩阵有:
A 1 = [ − 1 + x 2 x 1 2 − 2 x 1 − 1 ] x = 0 = [ − 1 0 2 − 1 ] {A}_1=\begin{bmatrix}-1+x_2&x_1\\2-2x_1&-1\end{bmatrix}_{{x}=0}=\begin{bmatrix}-1&0\\2&-1\end{bmatrix} A1=[−1+x22−2x1x1−1]x=0=[−120−1]
特征值是两重根-1,所以原点是局部渐进稳定平衡状态,同时由于系统存在第二个平衡点,所以原点不可能是全局渐近稳定的。
将第二个平衡点(1,1)代入Jacobi矩阵得:
A 2 = [ − 1 + x 2 x 1 2 − 2 x 1 − 1 ] x 1 = 1 , x 2 = 1 = [ 0 1 0 − 1 ] {A}_2=\begin{bmatrix}-1+x_2&x_1\\2-2x_1&-1\end{bmatrix}_{x_1=1,x_2=1}=\begin{bmatrix}0&1\\0&-1\end{bmatrix} A2=[−1+x22−2x1x1−1]x1=1,x2=1=[001−1]
两个特征值是0,-1。由于存在等于0的特征值,所以这个平衡点的稳定性不能由线性化方法来判断,要使用李雅普诺夫第二法。
3. 李雅普诺夫第二法(直接法)
3.1 二次型函数的定号性和西尔维斯特判据
![[lyapunov_1.png|550]]
函数
f
(
x
)
=
f
(
x
1
,
x
2
,
⋯
,
x
n
)
f({x})=f(x_1,x_2,\cdots,x_n)
f(x)=f(x1,x2,⋯,xn) 的正负性作如下定义:
- 正定 对于状态空间任意的非零点 x x x ,如果都有函数 f ( x ) f(x) f(x) 大于 0 ,而且仅当 x = 0 x=0 x=0 时,才有 f ( x ) = 0 f(x)=0 f(x)=0 .则称函数 f ( x ) = 0 f({x})=0 f(x)=0 是正定的,记为 f ( x ) > 0 f({x})>0 f(x)>0
- 正半定 对于状态空间任意的非零点 x x x ,如果都有函数 f ( x ) f(x) f(x) 大于或等于 0,而且仅当 x = 0 x=0 x=0 时,才有 f ( x ) = 0 f(x)=0 f(x)=0 .则称函数 f ( x ) = 0 f({x})=0 f(x)=0 是正半定的,记为 f ( x ) ≥ 0 f({x})\geq0 f(x)≥0
- 负定 − f ( x ) -f(x) −f(x) 是正定的,则称函数 f ( x ) f({x}) f(x) 是负定的,记作 f ( x ) < 0 f({x})<0 f(x)<0
- 负半定 − f ( x ) -f(x) −f(x) 是正半定的,则称函数 f ( x ) f({x}) f(x) 是负半定的,记作 f ( x ) ≤ 0 f({x})\leq0 f(x)≤0
- 不定 如果对于状态空间的非零点 x x x , f ( x ) f(x) f(x) 可正可负可为零,则称函数 f ( x ) = 0 f(x)=0 f(x)=0 为不定的
二次型函数
二次型函数
Q
(
x
)
Q(x)
Q(x) 可被表示为
Q
(
x
)
=
∑
i
=
1
,
j
=
1
n
p
i
j
x
i
x
j
=
x
T
P
x
Q({x})=\sum_{i=1,j=1}^np_{ij}x_ix_j={x}^\mathrm{T}{Px}
Q(x)=i=1,j=1∑npijxixj=xTPx
∑
i
=
1
j
=
1
2
p
j
x
i
x
j
=
p
1
x
1
2
+
p
12
x
1
x
2
+
p
1
x
2
x
1
+
p
2
x
2
2
=
[
x
1
x
2
]
[
p
11
p
12
p
21
p
22
]
[
x
1
x
2
]
\sum_{i=1j=1}^{2}p_{j}x_{i}x_{j}=p_{1}x_{1}^{2}+p_{12}x_{1}x_{2}+p_{1}x_{2}x_{1}+p_{2}x_{2}^{2}=[x_1 \,\,x_2] \begin{bmatrix} p_{11}&p_{12}\\ p_{21}&p_{22}\end{bmatrix}\begin{bmatrix}x_1\\x_2\end{bmatrix}
i=1j=1∑2pjxixj=p1x12+p12x1x2+p1x2x1+p2x22=[x1x2][p11p21p12p22][x1x2]
其中的
P
{P}
P 为
n
×
n
n\times n
n×n 实对称矩阵,称为二次型函数的加权矩阵。 二次型函数
Q
(
x
)
Q(x)
Q(x) 的正负性等价于加权矩阵
P
{P}
P 的正负性。而简单的二次型函数可以直接观察函数表达式来判断定号性。
- Q ( x ) = x 1 2 + x 2 2 Q({x})=x_1^2+x_2^2 Q(x)=x12+x22 只在原点处取等号,正定
- Q ( x ) = ( x 1 + x 2 ) 2 Q(x)=(x_1+x_2)^2 Q(x)=(x1+x2)2 只要 x 1 + x 2 = 0 x_1+x_2=0 x1+x2=0 就能取等号,正半定
- Q ( x ) = − x 2 2 Q({x})=-x_2^2 Q(x)=−x22 x 1 x_1 x1 任意取值, x 2 = 0 x_2=0 x2=0 时为0,负半定
复杂二次型函数需要借助对称矩阵定号性的西尔维斯特(Sylvester)判据。
西尔维斯特判据
- 实对称矩阵
P
{P}
P 为正定的条件是矩阵
P
{P}
P 的各阶主子式均大于零
Δ 1 = p 11 > 0 , Δ 2 = det [ p 11 p 12 p 21 p 22 ] > 0 , ⋯ Δ n = det P > 0 \Delta_1=p_{11}>0,\quad\Delta_2=\det\begin{bmatrix}p_{11}&p_{12}\\p_{21}&p_{22}\end{bmatrix}>0,\quad\cdots\quad\Delta_n=\det P>0 Δ1=p11>0,Δ2=det[p11p21p12p22]>0,⋯Δn=detP>0 - 实对称矩阵 P {P} P 为负定的条件是 矩阵 P {P} P 的各阶主子式奇数阶为负,偶数阶为正
- 实对称矩阵 P {P} P 为正半定的条件与正定的条件相比,允许各阶主子式等于 0,要求 det P = 0 \det{P}=0 detP=0
- 实对称矩阵 P {P} P 为负半定的条件与负定的条件相比,允许各阶主子式等于 0,要求 det P = 0 \det P=0 detP=0
3.2 李雅普诺夫主稳定性定理
如果一个没有外部输入的系统的某一个平衡状态是渐近稳定的,那么在这个平衡状态附近,随着系统的运动,它所储存的能量就会随着时间的推移而减少,在达到该平衡状态时它的能量为最小.所以,如果能够找到一个描述系统能量的函数,就可以讨论系统的能量函数随时间的变化来研究平衡状态的稳定性.
李雅普诺夫稳定性基本定理/主稳定性定理
给定一个没有外部输入的定常系统的运动方程和平衡状态
x
˙
=
f
(
x
)
,
x
e
=
0.
\dot{{x}}=f({x}),\quad{x}_e=0.
x˙=f(x),xe=0.
假设可以找到单值标量函数
V
(
x
)
V(x)
V(x) ,且
V
(
x
)
V(x)
V(x) 对各状态分量均有一阶连续偏导数。如果
V
(
x
)
V(x)
V(x) 及其对时间的导函数
V
˙
(
x
)
\dot{V}(x)
V˙(x) 满足
- V ( x ) V(x) V(x) 正定
- V ˙ ( x ) \dot{V}(x) V˙(x) 负定
则
x
e
=
0
x_e=0
xe=0 是局部渐进稳定的平衡状态,称
V
(
x
)
V(x)
V(x) 是该系统的一个李雅普诺夫函数。
如果
V
(
x
)
V(x)
V(x) 还满足
lim
∣
∣
x
∣
∣
→
∞
V
(
x
)
=
∞
\lim_{||x||\to\infty}V({x})=\infty
∣∣x∣∣→∞limV(x)=∞
则
x
e
=
0
x_e=0
xe=0 是全局渐进稳定的平衡状态。
将李雅普诺夫函数
V
(
x
)
V(x)
V(x) 看作是广义能量函数,导函数
V
˙
(
x
)
\dot{V}({x})
V˙(x) 就是广义功率函数。
V
˙
(
x
)
<
0
\dot{V}({x})<0
V˙(x)<0 表示消耗功率的运动过程,运动持续到能量消耗尽,即
V
(
x
)
=
0
V(x)=0
V(x)=0 且
V
˙
(
x
)
=
0
\dot{V}(x)=0
V˙(x)=0,也就是到达了状态空间的原点。
为了便于判定李雅普诺夫函数的正负情况,可以将李雅普诺夫函数选取为二次型函数,即
V
(
x
)
=
x
T
P
x
V(x)=x^{\mathrm{T}}Px
V(x)=xTPx 的形式。
还应注意,如果找不到满足条件的李雅普诺夫函数
V
(
x
)
V({x})
V(x) 就不能判断原点的稳定情况。
[!note]- example
给定系统方程
{ x ˙ 1 = − x 1 3 − 4 x 2 x ˙ 2 = 3 x 1 − x 2 3 \begin{cases}\dot{x}_1=-x_1^3-4x_2\\\dot{x}_2=3x_1-x_2^3&\end{cases} {x˙1=−x13−4x2x˙2=3x1−x23
试采用李雅普诺夫第二方法判断该系统在原点的稳定性
解:
x 1 = x 2 = 0 x_{1}=x_{2}=0 x1=x2=0
V ( x ) = a x 1 2 + b x 2 2 , s . t . a > 0 , b > 0 → V ( x ) > 0 V(x)=ax_{1}^{2}+bx_{2}^{2}\,\,,\, s.t.\, a>0\,,\,b>0\to V(x)>0 V(x)=ax12+bx22,s.t.a>0,b>0→V(x)>0
V ˙ ( x ) = 2 a x 1 x ˙ 1 + 2 b x 2 x ˙ 2 = 2 a x 1 ( − x 1 3 − 4 x 2 ) + 2 b x 2 ( 3 x 1 − x 2 3 ) = − 8 a x 1 x 2 + 6 b x 1 x 2 − 2 a x 1 4 − 2 b x 2 4 \begin{align*}\dot V(x)=&2ax_1\dot x_1+2bx_2\dot x_2=2ax_1(-x_1^3-4x_2)+2bx_2(3x_1-x_2^3) \\ \\=&-8ax_1x_2+6bx_1x_2-2ax_1^4-2bx_2^4\end{align*} V˙(x)==2ax1x˙1+2bx2x˙2=2ax1(−x13−4x2)+2bx2(3x1−x23)−8ax1x2+6bx1x2−2ax14−2bx24
如果
− 8 a x 1 x 2 + 6 b x 1 x 2 = 0 -8ax_1x_2+6bx_1x_2=0 −8ax1x2+6bx1x2=0
则 V ˙ ( x ) \dot V(x) V˙(x) 负定,所以有不妨取 a = 3 a=3 a=3 , b = 4 b=4 b=4 ,就得到了李雅普诺夫函数,且在原点处局部渐进稳定。下面判断是否大范围渐进稳定:
∵ lim ∣ ∣ x ∣ ∣ → ∞ V ( x ) = ∞ \because\lim_{||x||\to\infty}V(x)=\infty ∵∣∣x∣∣→∞limV(x)=∞
所以该系统在原点大范围渐进稳定。
3.3 其他稳定性和不稳定性定理
局部稳定 要求
V
(
x
)
V(x)
V(x) 正定,
V
˙
(
x
)
\dot V(x)
V˙(x) 负半定;
局部不稳定 要求
V
(
x
)
V(x)
V(x) 正定,
V
˙
(
x
)
\dot V(x)
V˙(x) 正定;
局部渐进稳定还可以包括一种情况:
V
(
x
)
V({x})
V(x) 正定,
V
˙
(
x
)
\dot{V}({x})
V˙(x) 负半定,但
V
˙
(
x
)
\dot{V}({x})
V˙(x) 的运动轨迹上不恒为零。
全局渐进稳定还可以包括一种情况:
V
(
x
)
V({x})
V(x) 正定,
V
˙
(
x
)
\dot{V}({x})
V˙(x) 负半定,
V
˙
(
x
)
\dot{V}({x})
V˙(x) 的零点不是状态方程的解(系统的状态轨迹线并不在导函数的零点上,等效为负定),即
V
˙
(
ϕ
(
t
;
x
0
,
0
)
)
≠
0
\dot V(\phi(t;x_0,0))\ne0
V˙(ϕ(t;x0,0))=0,且
lim
∣
∣
x
∣
∣
→
∞
V
(
x
)
=
∞
\lim_{||x||\to\infty}V(x)=\infty
lim∣∣x∣∣→∞V(x)=∞。
[!note]- example
判断下述系统的原点平衡状态 x e = 0 x_e=0 xe=0 是否为大范围渐进稳定
{ x ˙ 1 = x 2 x ˙ 2 = − x 1 − x 1 2 x 2 \begin{cases}\dot{x}_1=x_2\\\dot{x}_2=-x_1-x_1^2x_2&\end{cases} {x˙1=x2x˙2=−x1−x12x2
解:系统只有一个平衡点
x 1 = x 2 = 0 x_{1}=x_{2}=0 x1=x2=0
设李雅普诺夫函数
V ( x ) = a x 1 2 + b x 2 2 , s . t . a > 0 , b > 0 → V ( x ) > 0 V(x)=ax_{1}^{2}+bx_{2}^{2}\,\,,\, s.t.\, a>0\,,\,b>0\to V(x)>0 V(x)=ax12+bx22,s.t.a>0,b>0→V(x)>0
V ˙ ( x ) = 2 a x 1 x ˙ 1 + 2 b x 2 x ˙ 2 = 2 a x 1 x 2 + 2 b x 2 ( − x 1 − x 1 2 x 2 ) = 2 a x 1 x 2 − 2 b x 1 x 2 − 2 b x 1 2 x 2 2 \begin{align*}\dot V(x)=&2ax_1\dot x_1+2bx_2\dot x_2=2ax_1x_2+2bx_2(-x_1-x_1^2x_2) \\ \\=&2ax_1x_2-2bx_1x_2-2bx_1^2x_2^2\end{align*} V˙(x)==2ax1x˙1+2bx2x˙2=2ax1x2+2bx2(−x1−x12x2)2ax1x2−2bx1x2−2bx12x22
如果
2 a x 1 x 2 − 2 b x 1 x 2 = 0 2ax_1x_2-2bx_1x_2=0 2ax1x2−2bx1x2=0
则 V ˙ ( x ) \dot V(x) V˙(x) 负半定,所以有不妨取 a = 1 a=1 a=1 , b = 1 b=1 b=1 ,就得到了李雅普诺夫函数,且 V ( x ) V(x) V(x) 正定,系统在原点处局部稳定。下面判断是否大范围渐进稳定:
V ( x ) = x 1 2 + x 2 2 V(x)=x_1^2+x_2^2 V(x)=x12+x22
V ˙ ( x ) = − 2 x 1 2 x 2 2 \dot V(x)=-2x_1^2x_2^2 V˙(x)=−2x12x22
李雅普诺夫函数导函数的零点为
x = [ 0 x 2 ] , x = [ x 1 0 ] x=\begin{bmatrix}0\\x_2\end{bmatrix}\,\,,\,\,x=\begin{bmatrix}x_1\\0\end{bmatrix} x=[0x2],x=[x10]
导函数的零点不为系统状态方程的解,所以导函数不恒等于零,所以 V ˙ ( ϕ ( t ; x 0 , 0 ) ) ≢ 0 \dot V(\phi(t;x_0,0))\not\equiv0 V˙(ϕ(t;x0,0))≡0,又因为
lim ∣ ∣ x ∣ ∣ → ∞ V ( x ) = ∞ \lim_{||x||\to\infty}V(x)=\infty ∣∣x∣∣→∞limV(x)=∞
所以该系统在原点大范围渐进稳定。
[!note]- example
判断下述系统的原点平衡状态 x e = 0 x_e=0 xe=0 是否为大范围渐进稳定
{ x ˙ 1 = x 2 x ˙ 2 = − x 1 3 − x 2 \begin{cases}\dot{x}_1=x_2\\\dot{x}_2=-x_1^3-x_2&\end{cases} {x˙1=x2x˙2=−x13−x2
解:系统只有一个平衡点
x 1 = x 2 = 0 x_{1}=x_{2}=0 x1=x2=0
设李雅普诺夫函数
V ( x ) = a x 1 4 + b x 2 2 , s . t . a > 0 , b > 0 → V ( x ) > 0 V(x)=ax_{1}^{4}+bx_{2}^{2}\,\,,\, s.t.\, a>0\,,\,b>0\to V(x)>0 V(x)=ax14+bx22,s.t.a>0,b>0→V(x)>0
V ˙ ( x ) = 4 a x 1 3 x ˙ 1 + 2 b x 2 x ˙ 2 = 2 a x 1 x 2 + 2 b x 2 ( − x 1 3 − x 2 ) = 4 a x 1 3 x 2 − 2 b x 1 3 x 2 − 2 b x 2 2 \begin{align*}\dot V(x)=&4ax_1^3\dot x_1+2bx_2\dot x_2=2ax_1x_2+2bx_2(-x_1^3-x_2) \\ \\=&4ax_1^3x_2-2bx_1^3x_2-2bx_2^2\end{align*} V˙(x)==4ax13x˙1+2bx2x˙2=2ax1x2+2bx2(−x13−x2)4ax13x2−2bx13x2−2bx22
如果
4 a x 1 3 x 2 − 2 b x 1 3 x 2 = 0 4ax_1^3x_2-2bx_1^3x_2=0 4ax13x2−2bx13x2=0
则 V ˙ ( x ) \dot V(x) V˙(x) 负半定,所以有不妨取 a = 1 a=1 a=1 , b = 2 b=2 b=2 ,就得到了李雅普诺夫函数,且 V ( x ) V(x) V(x) 正定,系统在原点处局部稳定。下面判断是否大范围渐进稳定:
V ( x ) = x 1 4 + 2 x 2 2 V(x)=x_1^4+2x_2^2 V(x)=x14+2x22
V ˙ ( x ) = − 4 x 2 2 \dot V(x)=-4x_2^2 V˙(x)=−4x22
李雅普诺夫函数导函数的零点为
x = [ x 1 0 ] x=\begin{bmatrix}x_1\\0\end{bmatrix} x=[x10]
导函数的零点不为系统状态方程的解,所以导函数不恒等于零,所以 V ˙ ( ϕ ( t ; x 0 , 0 ) ) ≢ 0 \dot V(\phi(t;x_0,0)) \not\equiv 0 V˙(ϕ(t;x0,0))≡0,又因为
lim ∣ ∣ x ∣ ∣ → ∞ V ( x ) = ∞ \lim_{||x||\to\infty}V(x)=\infty ∣∣x∣∣→∞limV(x)=∞
所以该系统在原点大范围渐进稳定。
4. 连续系统应用
4.1 线性定常系统
设有线性定常系统:
x
˙
=
A
x
\dot x=Ax
x˙=Ax
取李雅普诺夫函数:
V
(
x
)
=
x
T
P
x
,
P
为正定阵
V(x)=x^\mathrm TPx\,\,,\,\,P为正定阵
V(x)=xTPx,P为正定阵
V
˙
(
x
)
=
x
˙
T
P
x
+
x
T
P
x
˙
=
x
T
A
T
P
x
+
x
T
P
A
x
=
x
T
(
A
T
P
+
P
A
)
x
=
−
x
T
Q
x
\begin{align*} \dot V(x)=&\dot x^\mathrm TPx+x^\mathrm TP\dot x=x^\mathrm TA^\mathrm TPx+x^\mathrm TPAx \\ \\ =&x^\mathrm T(A^\mathrm TP+PA)x\\\\ =&-x^\mathrm TQx \end{align*}
V˙(x)===x˙TPx+xTPx˙=xTATPx+xTPAxxT(ATP+PA)x−xTQx
如果
Q
Q
Q 矩阵也正定,则
V
˙
(
x
)
\dot V(x)
V˙(x) 负定。于是我们得到了连续系统的李雅普诺夫方程:
A
T
P
+
P
A
=
(
P
A
)
T
+
P
A
=
−
Q
A^\mathrm TP+PA=(PA)^\mathrm T+PA=-Q
ATP+PA=(PA)T+PA=−Q
李雅普诺夫定理 对以式
x
˙
=
A
x
.
\dot{{x}}={A}{x}.
x˙=Ax.
表示的不受外部作用的线性定常系统,它的平衡状态
x
e
=
0
x_e=0
xe=0 全局渐近稳定平衡的充分必要条件是:对任意一个给定的正定矩阵
Q
Q
Q,连续系统的李雅普诺夫方程有正定解矩阵
P
{P}
P。李雅普诺夫方程中的
Q
Q
Q 矩阵可以任意选取,但为了计算方便,通常会选取单位矩阵或单位矩阵的倍数。
[!note]- example
用线性系统的李雅普诺夫方程考察系统的稳定性
x ˙ = [ 0 1 − 1 − 1 ] x \dot{{x}}=\begin{bmatrix}0&1\\-1&-1\end{bmatrix}{x} x˙=[0−11−1]x
解:设
P = [ a b b c ] \left.P=\left[\begin{matrix}a&b\\b&c\end{matrix}\right.\right] P=[abbc]
A T P + P A = − Q A^\mathrm TP+PA=-Q ATP+PA=−Q
[ 0 − 1 1 − 1 ] [ a b b c ] + [ a b b c ] [ 0 1 − 1 − 1 ] = − Q \begin{bmatrix}0&-1\\1&-1\end{bmatrix} \begin{bmatrix}a&b\\b&c\end{bmatrix} +\begin{bmatrix}a&b\\b&c\end{bmatrix}\begin{bmatrix}0&1\\-1&-1\end{bmatrix}=-Q [01−1−1][abbc]+[abbc][0−11−1]=−Q
[ 2 b − a + b + c − a + b + c − a + b + 2 c ] = Q \begin{bmatrix}2b&-a+b+c\\-a+b+c&-a+b+2c \end{bmatrix}=Q [2b−a+b+c−a+b+c−a+b+2c]=Q
令 Q Q Q 为2倍单位矩阵,解得 a = 3 , b = 1 , c = 2 a=3\,\,,\,\,b=1\,\,,\,\,c=2 a=3,b=1,c=2 ,所以
P = [ 3 1 1 2 ] , Δ 1 = 3 > 0 , Δ 2 = 6 − 1 = 5 > 0 \left.P=\left[\begin{matrix}3&1\\1&2\end{matrix}\right.\right]\,\,,\,\,\Delta_1=3>0\,\,,\,\,\Delta_2=6-1=5>0 P=[3112],Δ1=3>0,Δ2=6−1=5>0
P P P 矩阵正定,所以原点全局渐进稳定。
4.2 非线性系统的克拉索夫斯基方法
为了判定非线性系统稳定性,克拉索夫斯基(Krasovski)提出一种可能的李雅普诺夫函数形式,对于一个不受外部作用的非线性定常系统
x
˙
=
f
(
x
)
\dot{{x}}={f}({x})
x˙=f(x)
如果
f
(
0
)
=
0
{f}(0)=0
f(0)=0 ,那么状态空间原点是平衡状态,即
x
e
=
0
{x}_e=0
xe=0 。克拉索夫斯基方法采用方程式右端函数的范数作为候选李雅普诺夫函数,即
V
(
x
)
=
∣
∣
f
(
x
)
∣
∣
=
f
T
(
x
)
f
(
x
)
V({x})=||{f}({x})||={f}^\mathrm{T}(x){f}({x})
V(x)=∣∣f(x)∣∣=fT(x)f(x)
不难得出,函数
V
(
x
)
V({x})
V(x) 是正定的,它的导函数
V
˙
(
x
)
=
f
˙
T
(
x
)
f
(
x
)
+
f
T
(
x
)
f
˙
(
x
)
\dot{V}({x})=\dot{{f}}^\mathrm{T}({x}){f}({x})+{f}^\mathrm{T}({x})\dot{{f}}({x})
V˙(x)=f˙T(x)f(x)+fT(x)f˙(x)
由于
f
(
x
)
=
F
(
x
)
x
˙
=
F
(
x
)
f
(
x
)
V
˙
(
x
)
=
f
˙
T
(
x
)
f
(
x
)
+
f
T
(
x
)
f
˙
(
x
)
=
[
F
(
x
)
f
(
x
)
]
T
f
(
x
)
+
f
T
(
x
)
F
(
x
)
f
(
x
)
=
f
T
(
x
)
[
F
T
(
x
)
+
F
(
x
)
]
f
(
x
)
\begin{aligned} & f(x)=F(x)\dot{x}=F(x)f(x) \\ \\ \dot{V}(x)& =\dot{f}^{\mathrm{T}}(x)f(x)+f^{\mathrm{T}}(x)\dot{f}(x) \\ \\ &=\left[F(x)f(x)\right]^{\mathrm{T}}f(x)+f^{\mathrm{T}}(x)F(x)f(x) \\ \\ &=f^{\mathrm{T}}(x)[F^{\mathrm{T}}(x)+F(x)]f(x) \end{aligned}
V˙(x)f(x)=F(x)x˙=F(x)f(x)=f˙T(x)f(x)+fT(x)f˙(x)=[F(x)f(x)]Tf(x)+fT(x)F(x)f(x)=fT(x)[FT(x)+F(x)]f(x)
设不受外部作用的非线性定常系统在所讨论的范围内具有惟一平衡状态
x
e
=
0
x_e=0
xe=0 ,那么在该范围内,当
F
T
(
x
)
+
{F}^{\mathrm{T}}({x})+
FT(x)+
F
(
x
)
{F}({x})
F(x) 负定时,
x
e
=
0
{x}_e=0
xe=0 是渐近稳定的平衡状态。
进一步讲,如果在全状态空间
F
T
(
x
)
+
F
(
x
)
{F}^{\mathrm{T}}({x})+{F}({x})
FT(x)+F(x) 均负定,且当
∣
∣
x
∣
∣
→
∞
||{x}||\to\infty
∣∣x∣∣→∞ 时,有
∣
∣
f
(
x
)
∣
∣
→
∞
||{f}({x})||\to\infty
∣∣f(x)∣∣→∞ ,则
x
e
=
0
{x}_e=0
xe=0 是全局渐近稳定的平衡状态。
如果雅可比矩阵
F
(
x
)
F({x})
F(x) 本身就是对称矩阵,定理条件可以简化为只判断是否满足
F
(
x
)
<
0
{F}({x})<0
F(x)<0 (负定) 。
判定矩阵
F
T
(
x
)
+
F
(
x
)
{F^T}({x})+{F}({x})
FT(x)+F(x) 为负定的必要条件是:
- 方程右端函数 f ( x ) f(x) f(x) 的每个分量 f i ( x ) f_i({x}) fi(x) 必须包含 x i x_i xi
- 且偏导数
∂
f
i
(
x
)
/
∂
x
i
\partial f_i({x})/\partial x_i
∂fi(x)/∂xi 必须为负值
如不满足这两个条件,则不必尝试采用克拉索夫斯基方法。
[!note]- example
采用克拉索夫斯基方法证明系统
{ x ˙ 1 = − 5 x 1 + x 2 x ˙ 2 = x 1 − x 2 − x 2 3 \begin{cases}\dot{x}_1=-5x_1+x_2\\\dot{x}_2=x_1-x_2-x_2^3&\end{cases} {x˙1=−5x1+x2x˙2=x1−x2−x23
的平衡状态 x e = 0 {x}_e=0 xe=0 是全局渐近稳定的。
解:因为
f 1 ( x ) = − 5 x 1 + x 2 f_1(x)=-5x_1+x_2 f1(x)=−5x1+x2
f 2 ( x ) = x 1 − x 2 − x 2 3 f_2(x)=x_1-x_2-x_2^3 f2(x)=x1−x2−x23
∂ f 1 ( x ) ∂ x 1 = − 5 < 0 , ∂ f 2 ( x ) ∂ x 2 = − 1 − 3 x 2 2 < 0 \frac{\partial f_1(x)}{\partial x_1}=-5<0\,\,,\,\,\frac{\partial f_2(x)}{\partial x_2}=-1-3x_2^2<0 ∂x1∂f1(x)=−5<0,∂x2∂f2(x)=−1−3x22<0
可以使用克拉索夫斯基方法。
∂ f 1 ( x ) ∂ x 2 = ∂ f 2 ( x ) ∂ x 1 = 1 \frac{\partial f_1(x)}{\partial x_2}=\frac{\partial f_2(x)}{\partial x_1}=1 ∂x2∂f1(x)=∂x1∂f2(x)=1
Jacobi矩阵
F = [ − 5 1 1 − 1 − 3 x 2 2 ] , Δ 1 = − 5 < 0 , Δ 2 = 4 + 15 x 2 2 > 0 F=\begin{bmatrix}-5&1\\1&-1-3x_2^2\end{bmatrix}\,\,,\,\,\Delta_1=-5<0\,\,,\,\,\Delta_2=4+15x_2^2>0 F=[−511−1−3x22],Δ1=−5<0,Δ2=4+15x22>0
所以 F ( x ) F(x) F(x) 负定,而 ∣ ∣ x ∣ ∣ → ∞ ||x||\to\infty ∣∣x∣∣→∞ 时,
V ( x ) = ∣ ∣ f ( x ) ∣ ∣ = ( − 5 x 1 + x 2 ) 2 + ( x 1 − x 2 − x 2 3 ) 2 → ∞ V(x)=||f(x)||=(-5x_1+x_2)^2+(x_1-x_2-x_2^3)^2\to\infty V(x)=∣∣f(x)∣∣=(−5x1+x2)2+(x1−x2−x23)2→∞
所以系统在原点全局渐近稳定。
4.3 非线性系统变量梯度法
舒茨—基布逊(Schultz-Gibson)变量梯度法采用逆向思维的构造思路,先根据
V
˙
(
x
)
<
0
\dot{V}({x})<0
V˙(x)<0 找出李雅普诺夫函数的导函数,在此基础上计算函数
V
(
x
)
V({x})
V(x),如果
V
(
x
)
V({x})
V(x) 是正定的,就能成功获得所需要的李雅普诺夫函数。
李雅普诺夫函数
V
(
x
)
V({x})
V(x) 具有方向导数,即单值的梯度向量
grad
V
\text{grad}V
gradV:
grad
V
=
[
∂
V
∂
x
1
∂
V
∂
x
2
⋮
∂
V
∂
x
n
]
=
[
∇
1
∇
2
⋮
∇
n
]
\text{grad}V=\begin{bmatrix}\frac{\partial V}{\partial x_1}\\\frac{\partial V}{\partial x_2}\\\vdots\\\frac{\partial V}{\partial x_n}\end{bmatrix}=\left[{\begin{array}{c}\nabla_1\\\nabla_2\\\vdots\\\nabla_n\end{array}}\right]
gradV=
∂x1∂V∂x2∂V⋮∂xn∂V
=
∇1∇2⋮∇n
V
˙
(
x
)
=
d
V
d
t
=
[
∂
V
∂
x
1
∂
V
∂
x
2
⋯
∂
V
∂
x
n
]
[
x
˙
1
x
˙
2
⋮
x
˙
n
]
=
[
grad
V
]
T
x
˙
\left.\dot{V}({x})=\frac{\mathrm{d}V}{\mathrm{d}t}=\left[\begin{array}{ccc}\frac{\partial V}{\partial x_1}&\frac{\partial V}{\partial x_2}&\cdots&\frac{\partial V}{\partial x_n}\end{array}\right.\right]\left[\begin{array}{c}\dot{x}_1\\\dot{x}_2\\\vdots\\\dot{x}_n\end{array}\right]=[\operatorname{grad}V]^\mathrm{T}\dot{{x}}
V˙(x)=dtdV=[∂x1∂V∂x2∂V⋯∂xn∂V]
x˙1x˙2⋮x˙n
=[gradV]Tx˙
所以,李雅普诺夫函数
V
(
x
)
V({x})
V(x) 可由梯度向量
grad
V
\text{grad}V
gradV 做线积分。为了使线积分结果与路径无关以简化计算,应使梯度向量的旋度为零
∂
∇
i
∂
x
j
=
∂
∇
j
∂
x
i
;
i
≠
j
;
i
,
j
=
1
,
2
,
⋯
,
n
\frac{\partial\nabla_i}{\partial x_j}=\frac{\partial\nabla_j}{\partial x_i};\quad i\neq j;\quad i,j=1,2,\cdots,n
∂xj∂∇i=∂xi∂∇j;i=j;i,j=1,2,⋯,n
也就是要求梯度向量的雅可比矩阵为对称阵
∂
∂
x
T
(
grad
V
)
=
[
∂
∇
1
∂
x
1
∂
∇
1
∂
x
2
⋯
∂
∇
1
∂
x
n
∂
∇
2
∂
x
1
∂
∇
2
∂
x
2
⋯
∂
∇
2
∂
x
n
⋮
⋮
⋱
⋮
∂
∇
n
∂
x
1
∂
∇
n
∂
x
2
⋯
∂
∇
n
∂
x
n
]
\frac \partial{\partial{x}^\mathrm{T} }( \text{grad}V) =\left.\left[\begin{array}{cccc}\frac{\partial\nabla_1}{\partial x_1}&\frac{\partial\nabla_1}{\partial x_2}&\cdots&\frac{\partial\nabla_1}{\partial x_n}\\\frac{\partial\nabla_2}{\partial x_1}&\frac{\partial\nabla_2}{\partial x_2}&\cdots&\frac{\partial\nabla_2}{\partial x_n}\\\vdots&\vdots&\ddots&\vdots\\\frac{\partial\nabla_n}{\partial x_1}&\frac{\partial\nabla_n}{\partial x_2}&\cdots&\frac{\partial\nabla_n}{\partial x_n}\end{array}\right.\right]
∂xT∂(gradV)=
∂x1∂∇1∂x1∂∇2⋮∂x1∂∇n∂x2∂∇1∂x2∂∇2⋮∂x2∂∇n⋯⋯⋱⋯∂xn∂∇1∂xn∂∇2⋮∂xn∂∇n
采用变量梯度法构造李雅普诺夫函数的实施方案可以总结如下:
- 设梯度向量
grad V = [ a 11 x 1 + a 12 x 2 + ⋯ + a 1 n x n ⋮ a n 1 x 1 + a n 2 x 2 + ⋯ + a n n x n ] = A ( x ) x \left.\text{grad}V=\left[\begin{array}{c}a_{11}x_1+a_{12}x_2+\cdots+a_{1n}x_n\\\vdots\\a_{n1}x_1+a_{n2}x_2+\cdots+a_{nn}x_n\end{array}\right.\right]={A}({x}){x} gradV= a11x1+a12x2+⋯+a1nxn⋮an1x1+an2x2+⋯+annxn =A(x)x
a i j a_{ij} aij 为待定系数,可以是常数也可以是函数;
- 由梯度向量构造导函数, V ˙ ( x ) = ( grad V ) T x ˙ \dot{V} ( {x}) = ( \text{grad}V) ^{\mathrm{T} }\dot{{x}} V˙(x)=(gradV)Tx˙
- 由导函数负定、梯度向量的雅可比矩阵为对称阵两个条件确定待定系数或待定系数应满足的部分关系
- 沿坐标轴求线积分得李雅普诺夫函数 V ( x ) V({x}) V(x),由李雅普诺夫函数正定确定其余待定系数
- 确定原点的渐进稳定性是局部还是全局
[!note]- example
采用变量梯度法研究系统
{ x ˙ 1 = − x 1 + 2 x 1 2 x 2 x ˙ 2 = − x 2 \begin{cases}\dot{x}_1=-x_1+2x_1^2x_2\\\dot{x}_2=-x_2&\end{cases} {x˙1=−x1+2x12x2x˙2=−x2
在平衡状态 x e = 0 {x}_e=0 xe=0 的渐近稳定性
解:设梯度向量
grad V ( x ) = [ ∇ 1 ∇ 2 ] = [ a 11 x 1 + a 12 x 2 a 21 x 1 + a 22 x 2 ] \text{grad}V({x})=\begin{bmatrix}\nabla_1\\\nabla_2\end{bmatrix}=\left[{\begin{array}{c}a_{11}x_1+a_{12}x_2\\a_{21}x_1+a_{22}x_2\end{array}}\right] gradV(x)=[∇1∇2]=[a11x1+a12x2a21x1+a22x2]
计算导函数
V ˙ ( x ) = ( g r a d V ) T x ˙ = ( a 11 x 1 + a 12 x 2 ) x ˙ 1 + ( a 21 x 1 + a 22 x 2 ) x ˙ 2 = − a 11 x 1 2 ( 1 − 2 x 1 x 2 ) − a 22 x 2 2 − ( a 12 + a 21 ) x 1 x 2 + 2 a 12 x 1 2 x 2 2 \begin{aligned}\dot{V}({x})&=(\mathrm{grad}V)^{\mathrm{T}}\dot{{x}}=(a_{11}x_1+a_{12}x_2)\dot{x}_1+(a_{21}x_1+a_{22}x_2)\dot{x}_2\\&=-a_{11}x_1^2(1-2x_1x_2)-a_{22}x_2^2-(a_{12}+a_{21})x_1x_2+2a_{12}x_1^2x_2^2\end{aligned} V˙(x)=(gradV)Tx˙=(a11x1+a12x2)x˙1+(a21x1+a22x2)x˙2=−a11x12(1−2x1x2)−a22x22−(a12+a21)x1x2+2a12x12x22
此时开始限定待定系数,为了满足雅可比矩阵对称、导函数负定,可以首先令 a 12 = a 21 = 0 a_{12}=a_{21}=0 a12=a21=0,这样既满足了对称,又可以消掉导函数中的两个不容易判定正负的项。再取
a 11 > 0 , a 22 > 0 , x 1 x 2 < 1 2 a_{11}>0,\quad a_{22}>0,\quad x_1x_2<\frac12 a11>0,a22>0,x1x2<21
再求李雅普诺夫函数,为了积分方便,可以取 a 11 = 1 , a 22 = 1 a_{11}=1,a_{22}=1 a11=1,a22=1
grad V ( x ) = [ ∇ 1 ∇ 2 ] = [ x 1 x 2 ] \text{grad}V({x})=\begin{bmatrix}\nabla_1\\\nabla_2\end{bmatrix}=\left[{\begin{array}{c}x_1\\ x_2\end{array}}\right] gradV(x)=[∇1∇2]=[x1x2]
按坐标积分
V ( x ) = ∫ 0 x 1 x 1 d x 1 + ∫ 0 x 2 x 2 d x 2 = 1 2 x 1 2 + 1 2 x 2 2 V({x})=\int_0^{x_1}x_1\mathrm{d}x_1+\int_0^{x_2}x_2\mathrm{d}x_2=\frac12x_1^2+\frac12x_2^2 V(x)=∫0x1x1dx1+∫0x2x2dx2=21x12+21x22
因为 V ( x ) > 0 V({x})>0 V(x)>0,所以 x e = 0 {x}_e=0 xe=0 是局部渐进稳定的平衡状态,李雅普诺夫函数存在范围是 x 1 x 2 < 0.5 x_1x_2<0.5 x1x2<0.5 。
4.4 线性时变系统
若系统
x
=
A
(
t
)
x
(
t
)
x= A(t)x(t)
x=A(t)x(t) 的矩阵
A
A
A 是
t
t
t 的函数(即时变函数),则系统在平衡点
x
e
=
0
{x}_e=0
xe=0
处是大范围渐近稳定的充要条件为:
对于任意给定的连续对称正定矩阵
Q
(
t
)
Q(t)
Q(t) ,存在一个连续对称正定矩阵
P
(
t
)
P(t)
P(t),满足
P
˙
(
t
)
=
−
A
T
(
t
)
P
(
t
)
−
P
(
t
)
A
(
t
)
−
Q
(
t
)
\dot{P}(t)=-A^{\mathrm{T}}(t)P(t)-P(t)A(t)-Q(t)
P˙(t)=−AT(t)P(t)−P(t)A(t)−Q(t)
系统的李亚普诺夫函数即为
V
(
x
,
t
)
=
x
T
(
t
)
P
(
t
)
x
(
t
)
V(x,t)=x^{\mathrm{T}}(t)P(t)x(t)
V(x,t)=xT(t)P(t)x(t)
证明 取系统的李亚普诺夫函数为
V
(
x
,
t
)
=
x
T
(
t
)
P
(
t
)
x
(
t
)
V(x,t)=x^{\mathrm{T}}(t)P(t)x(t)
V(x,t)=xT(t)P(t)x(t)
P
(
t
)
P(t)
P(t)为对称正定矩阵,因此
V
˙
(
t
)
=
x
˙
T
(
t
)
P
(
t
)
x
(
t
)
+
x
T
(
t
)
P
˙
(
t
)
x
(
t
)
+
x
T
(
t
)
P
(
t
)
x
˙
(
t
)
=
x
T
(
t
)
A
T
(
t
)
P
(
t
)
x
(
t
)
+
x
T
(
t
)
P
˙
(
t
)
x
(
t
)
+
x
T
(
t
)
P
(
t
)
A
(
t
)
x
(
t
)
=
x
T
(
t
)
[
A
T
(
t
)
P
(
t
)
+
P
˙
(
t
)
+
P
(
t
)
A
(
t
)
]
x
(
t
)
=
−
x
T
(
t
)
Q
(
t
)
x
(
t
)
\begin{aligned} \dot{V}(t)& =\dot{x}^{\mathrm{T}}(t)P(t)x(t)+x^{\mathrm{T}}(t)\dot{P}(t)x(t)+x^{\mathrm{T}}(t)P(t)\dot{x}(t) \\ \\ &=x^{\mathrm{T}}(t)A^{\mathrm{T}}(t)P(t)x(t)+x^{\mathrm{T}}(t)\dot{P}(t)x(t)+x^{\mathrm{T}}(t)P(t)A(t)x(t) \\ \\ &=x^{\mathrm{T}}(t)[A^{\mathrm{T}}(t)P(t)+\dot{P}(t)+P(t)A(t)]x(t) \\ \\ &=-x^{\mathrm{T}}(t)Q(t)x(t) \end{aligned}
V˙(t)=x˙T(t)P(t)x(t)+xT(t)P˙(t)x(t)+xT(t)P(t)x˙(t)=xT(t)AT(t)P(t)x(t)+xT(t)P˙(t)x(t)+xT(t)P(t)A(t)x(t)=xT(t)[AT(t)P(t)+P˙(t)+P(t)A(t)]x(t)=−xT(t)Q(t)x(t)
其中
Q
(
t
)
=
−
A
T
(
t
)
P
(
t
)
−
P
˙
(
t
)
−
P
(
t
)
A
(
t
)
Q(t)=-A^{\mathrm{T}}(t)P(t)-\dot{P}(t)-P(t)A(t)
Q(t)=−AT(t)P(t)−P˙(t)−P(t)A(t)
根据主稳定性定理,因为
P
P
P 是正定对称矩阵 (
V
V
V 正定),所以若
Q
Q
Q 也是正定对称矩阵,则
V
˙
(
x
,
t
)
\dot{V}(x,t)
V˙(x,t) 是负定的,系统是渐近稳定的。
[!note]- example
给定线性时变系统
x ˙ = [ 0 1 − 1 t + 1 − 10 ] x , t ≥ 0 \dot{x}= \begin{bmatrix}0 & 1\\-\frac{1}{t+1} & -10\end{bmatrix} x\,,\,t\ge 0 x˙=[0−t+111−10]x,t≥0
判断其原点平衡状态是否为大范围渐近稳定
解:设
P = [ a ( t ) 0 0 b ( t ) ] P=\begin{bmatrix}a(t)&0\\0&b(t)\end{bmatrix} P=[a(t)00b(t)]
李雅普诺夫函数为
V ( x , t ) = [ x 1 x 2 ] [ a 0 0 b ] [ x 1 x 2 ] = a x 1 2 + b x 2 2 , s . t . a > 0 , b > 0 → V ( x ) > 0 V(x,t)=[x_1 \,\,x_2]\begin{bmatrix}a&0\\0&b\end{bmatrix}\begin{bmatrix}x_1\\x_2\end{bmatrix}=ax_{1}^{2}+bx_{2}^{2}\,\,,\, s.t.\, a>0\,,\,b>0\to V(x)>0 V(x,t)=[x1x2][a00b][x1x2]=ax12+bx22,s.t.a>0,b>0→V(x)>0
P A + ( P A ) T + P ˙ = − Q PA+(PA)^\mathrm T+\dot P=-Q PA+(PA)T+P˙=−Q
[ 0 a − b t + 1 − 10 b ] + [ 0 − b t + 1 a − 10 b ] + [ a ˙ 0 0 b ˙ ] = [ q 11 0 0 q 22 ] \begin{bmatrix}0 &a\\-\frac b{t+1} &-10b\end{bmatrix}+\begin{bmatrix}0 &-\frac b{t+1}\\a &-10b\end{bmatrix}+\begin{bmatrix}\dot a &0\\0 &\dot b\end{bmatrix}=\begin{bmatrix}q_{11} &0\\0 &q_{22}\end{bmatrix} [0−t+1ba−10b]+[0a−t+1b−10b]+[a˙00b˙]=[q1100q22]
其中 q 11 < 0 q_{11}<0 q11<0, q 22 < 0 q_{22}<0 q22<0。因为 a > 0 a>0 a>0, a ˙ < 0 \dot a<0 a˙<0 ,所以 a a a 为常数,设 a = 1 a=1 a=1,有
b = t + 1 , 且 − 20 ( t + 1 ) + 1 < 0 , t ≥ 0 b = t+1\,\,,且\,\,-20(t+1)+1<0\,\,,t\ge0 b=t+1,且−20(t+1)+1<0,t≥0
所以
V ( x , t ) = x 1 2 + ( t + 1 ) x 2 2 V(x,t)=x_1^2+(t+1)x_2^2 V(x,t)=x12+(t+1)x22
显然 V ( x , t ) V(x,t) V(x,t) 正定,而
V ˙ ( x , t ) = [ ∂ V ( x , t ) ∂ x 1 ∂ V ( x , t ) ∂ x 2 ] [ x ˙ 1 x ˙ 2 ] + ∂ V ( x , t ) ∂ t = [ x 1 ( t + 1 ) x 2 ] [ x 2 − 1 t + 1 x 1 − 10 x 2 ] + x 2 2 = − ( 20 t + 19 ) x 2 2 \begin{align*} \dot V(x,t)=&\bigg[\frac{\partial V(x,t)}{\partial x_1}\,\,\,\frac{\partial V(x,t)}{\partial x_2}\bigg]\begin{bmatrix}\dot x_1\\\dot x_2\end{bmatrix} +\frac{\partial V(x,t)}{\partial t}\\ \\ =&[x_1 \,\,(t+1)x_2]\begin{bmatrix}x_2\\-\frac1{t+1}x_1-10x_2\end{bmatrix}+x_2^2\\ \\ =&-(20t+19)x_2^2 \end{align*} V˙(x,t)===[∂x1∂V(x,t)∂x2∂V(x,t)][x˙1x˙2]+∂t∂V(x,t)[x1(t+1)x2][x2−t+11x1−10x2]+x22−(20t+19)x22
李雅普诺夫函数导函数的零点为
x = [ x 1 0 ] x=\begin{bmatrix}x_1\\0\end{bmatrix} x=[x10]
导函数的零点不为系统状态方程的解,所以导函数不恒等于零,所以 V ˙ ( ϕ ( t ; x 0 , 0 ) , t ) ≢ 0 \dot V(\phi(t;x_0,0),t) \not\equiv 0 V˙(ϕ(t;x0,0),t)≡0,又因为
lim ∣ ∣ x ∣ ∣ → ∞ V ( x ) = ∞ \lim_{||x||\to\infty}V(x)=\infty ∣∣x∣∣→∞limV(x)=∞
所以该系统在原点大范围渐进稳定。文章来源:https://www.toymoban.com/news/detail-744801.html
下链
【现代控制理论速学系列】让你的大三下半学期安心考研文章来源地址https://www.toymoban.com/news/detail-744801.html
到了这里,关于【现代控制系统】李雅普诺夫稳定性 Lyapunov Stability的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!