一、实验目的
进程调度是处理机管理的核心内容。本实验要求用高级语言编写模拟进程调度程序,以 便加深理解有关进程控制快、进程队列等概念,并体会和了解优先数算法和时间片轮转算法 的具体实施办法。
二、实验要求
1.设计进程控制块 PCB 的结构,通常应包括如下信息:
进程名、进程优先数(或轮转时间片数)、进程已占用的 CPU 时间、进程到完成还需要的时间、进程的状态、当前队列指针等。
2.编写两种调度算法程序:
优先数调度算法程序
循环轮转调度算法程序
3.按要求输出结果。
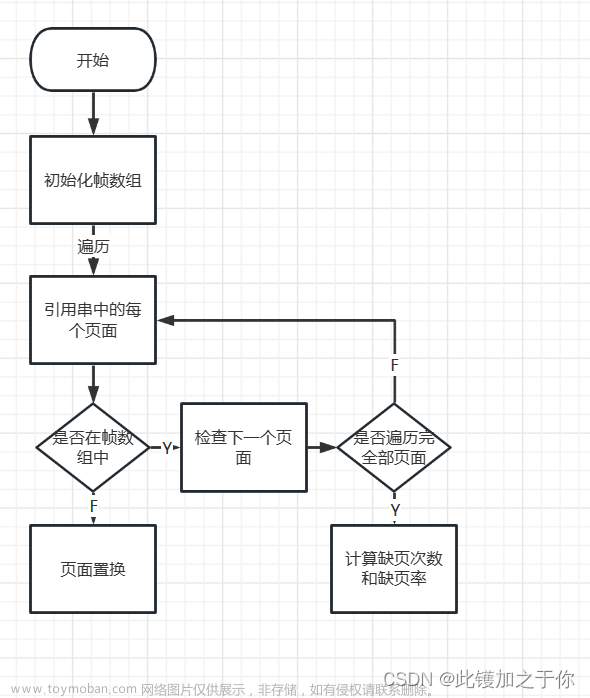
三、实验过程
分别用两种调度算法对伍个进程进行调度。每个进程可有三种状态;执行状态(RUN)、
就绪状态(READY,包括等待状态)和完成状态(FINISH),并假定初始状态为就绪状态。
(一)进程控制块结构如下:
NAME——进程标示符
PRIO/ROUND——进程优先数/进程每次轮转的时间片数(设为常数 2)
CPUTIME——进程累计占用 CPU 的时间片数
NEEDTIME——进程到完成还需要的时间片数
STATE——进程状态
NEXT——链指针
注:
1.为了便于处理,程序中进程的的运行时间以时间片为单位进行计算;
2.各进程的优先数或轮转时间片数,以及进程运行时间片数的初值,均由用户在程序运行时给定。
(二)进程的就绪态和等待态均为链表结构,共有四个指针如下:
RUN——当前运行进程指针
READY——就需队列头指针
TAIL—— 就需队列尾指针
FINISH—— 完成队列头指针
(三)程序说明
1. 在优先数算法中,进程优先数的初值设为:
50-NEEDTIME
每执行一次,优先数减 1,CPU 时间片数加 1,进程还需要的时间片数减 1。在轮转法中,采用固定时间片单位(两个时间片为一个单位),进程每轮转一次,CPU时间片数加 2,进程还需要的时间片数减 2,并退出 CPU,排到就绪队列尾,等待下一次调度。
2. 程序的模块结构如下:
整个程序可由主程序和如下 7 个过程组成:
2
(1)INSERT1——在优先数算法中,将尚未完成的 PCB 按优先数顺序插入到就绪队列中;
(2)INSERT2——在轮转法中,将执行了一个时间片单位(为 2),但尚未完成的进程
的 PCB,插到就绪队列的队尾;
(3)FIRSTIN——调度就绪队列的第一个进程投入运行;
(4)PRINT——显示每执行一次后所有进程的状态及有关信息。
(5)CREATE——创建新进程,并将它的 PCB 插入就绪队列;
(6)PRISCH——按优先数算法调度进程;
(7)ROUNDSCH——按时间片轮转法调度进程。
主程序定义 PCB 结构和其他有关变量。文章来源:https://www.toymoban.com/news/detail-744848.html
代码:文章来源地址https://www.toymoban.com/news/detail-744848.html
Main.cpp
#include<iostream>
#include<string>
using namespace std;
typedef struct node
{
char name[20]; //进程名
int prio; //进程优先级
int round; //分配CPU的时间片
int cputime; //CPU执行时间
int needtime; //进程执行所需时间
char state; //进程状态
int count; //记录执行次数
struct node *next; //链表指针
}PCB;
int num;
//定义三个队列,就绪队列,执行队列,完成队列
PCB *ready = NULL; //就绪队列
PCB *run = NULL; //执行队列
PCB *finish = NULL; //完成队列
//取得第一个就绪节点
void GetFirst()
{
run = ready;
if (ready != NULL)
{
run->state = 'R';
ready = ready->next;
run->next = NULL;
}
}
//优先级输出队列
void Output1()
{
PCB *p;
p = ready;
while (p != NULL)
{
cout << p->name << "\t" << p->prio << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << " \t " << p->count << endl;
p = p->next;
}
p = finish;
while (p != NULL)
{
cout << p->name << "\t" << p->prio << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << " \t " << p->count << endl;
p = p->next;
}
p = run;
while (p != NULL)
{
cout << p->name << "\t" << p->prio << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << " \t " << p->count << endl;
p = p->next;
}
}
//轮转法输出队列
void Output2()
{
PCB *p;
p = ready;
while (p != NULL)
{
cout << p->name << "\t" << p->round << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << "\t " << p->count << endl;
p = p->next;
}
p = finish;
while (p != NULL)
{
cout << p->name << "\t" << p->round << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << "\t " << p->count << endl;
p = p->next;
}
p = run;
while (p != NULL)
{
cout << p->name << "\t" << p->round << "\t" << p->cputime << "\t" << p->needtime << "\t " << p->state << "\t " << p->count << endl;
p = p->next;
}
}
//创建优先级队列
//创建优先级队列,规定优先数越小,优先级越低
void InsertPrio(PCB *in)
{
PCB *fst, *nxt;
fst = nxt = ready;
if (ready == NULL) //如果队列为空,则为第一个元素
{
in->next = ready;
ready = in;
}
else //查到合适的位置进行插入
{
if (in->prio >= fst->prio) //比第一个还要大,则插入到队头
{
in->next = ready;
ready = in;
}
else
{
while (fst->next != NULL) //移动指针查找第一个比它小的元素的位置进行插入
{
nxt = fst;
fst = fst->next;
}
if (fst->next == NULL) //已经搜索到队尾,则其优先级数最小,将其插入到队尾即可
{
in->next = fst->next;
fst->next = in;
}
else //插入到队列中
{
nxt = in;
in->next = fst;
}
}
}
}
//将进程插入到就绪队列尾部
void InsertTime(PCB *in)
{
PCB *fst;
fst = ready;
if (ready == NULL)
{
in->next = ready;
ready = in;
}
else
{
while (fst->next != NULL)
{
fst = fst->next;
}
in->next = fst->next;
fst->next = in;
}
}
//将进程插入到完成队列尾部
void InsertFinish(PCB *in)
{
PCB *fst;
fst = finish;
if (finish == NULL)
{
in->next = finish;
finish = in;
}
else
{
while (fst->next != NULL)
{
fst = fst->next;
}
in->next = fst->next;
fst->next = in;
}
}
//优先级调度输入函数
void PrioCreate()
{
PCB *tmp;
int i;
cout << "Enter the name and needtime:" << endl;
for (i = 0; i < num; i++)
{
if ((tmp = (PCB *)malloc(sizeof(PCB))) == NULL)
{
cerr << "malloc" << endl;
exit(1);
}
cin >> tmp->name;
getchar();
cin >> tmp->needtime;
tmp->cputime = 0;
tmp->state = 'W';
tmp->prio = 50 - tmp->needtime; //设置其优先级,需要的时间越多,优先级越低
tmp->round = 0;
tmp->count = 0;
InsertPrio(tmp); //按照优先级从高到低,插入到就绪队列
}
cout << "进程名\t优先级\tcpu时间\t需要时间 进程状态 计数器" << endl;
}
//时间片输入函数
void TimeCreate()
{
PCB *tmp;
int i;
cout << "输入进程名字和进程时间片所需时间:" << endl;
for (i = 0; i < num; i++)
{
if ((tmp = (PCB *)malloc(sizeof(PCB))) == NULL)
{
cerr << "malloc" << endl;
exit(1);
}
cin >> tmp->name;
getchar();
cin >> tmp->needtime;
tmp->cputime = 0;
tmp->state = 'W';
tmp->prio = 0;
tmp->round = 2;
tmp->count = 0;
InsertTime(tmp);
}
cout << "进程名\t轮数\tCPU时间\t需要时间 进程状态 计数器" << endl;
}
//按照优先级调度,每次执行一个时间片
void Priority()
{
int flag = 1;
GetFirst();
while (run != NULL)
{
Output1();
while (flag)
{
run->prio -= 3; //优先级减去三
run->cputime++; //CPU时间片加一
run->needtime--;//进程执行完成的剩余时间减一
if (run->needtime == 0)//如果进程执行完毕,将进程状态置为F,将其插入到完成队列
{
run->state = 'F';
run->count++;
InsertFinish(run);
flag = 0;
}
else //将进程状态置为W,入就绪队列
{
run->state = 'W';
run->count++; //进程执行的次数加一
InsertTime(run);
flag = 0;
}
}
flag = 1;
GetFirst(); //继续取就绪队列队头进程进入执行队列
}
}
void RoundRun() //时间片轮转调度算法
{
int flag = 1;
GetFirst();
while (run != NULL)
{
Output2();
while (flag)
{
run->count++;
run->cputime++;
run->needtime--;
if (run->needtime == 0) //进程执行完毕
{
run->state = 'F';
InsertFinish(run);
flag = 0;
}
else if (run->count == run->round)//时间片用完
{
run->state = 'W';
run->count = 0; //计数器清零,为下次做准备
InsertTime(run);
flag = 0;
}
}
flag = 1;
GetFirst();
}
}
int main(void)
{
int n;
cout << "输入进程个数:" << endl;
cin >> num;
getchar();
cout << "-----------------进程调度算法模拟----------------------" << endl;
cout << " 1、优先级调度算法" << endl;
cout << " 2、循环轮转调度算法 " << endl;
cout << "-------------------------------------------------------" << endl;
cout << "输入选择序号:" << endl;
cin >> n;
switch (n)
{
case 1:
cout << "优先级调度:" << endl;
PrioCreate();
Priority();
Output1();
break;
case 2:
cout << "循环轮转算法:" << endl;
TimeCreate();
RoundRun();
Output2();
break;
case 0:
exit(1);
break;
default:
cout << "Enter error!" << endl;
break;
}
cout << endl;
return 0;
}到了这里,关于计算机操作系统实验-进程调度模拟算法的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!