1. 简介
-
RK3588从入门到精通
-
本⽂介绍在rockchip平台下如何配置i2c接口的方法并且添加调试验证i2c外设的例子
-
开发板:ArmSoM-W3
-
Kernel:5.10.160
-
OS:Debian11
2. i2c接口概述
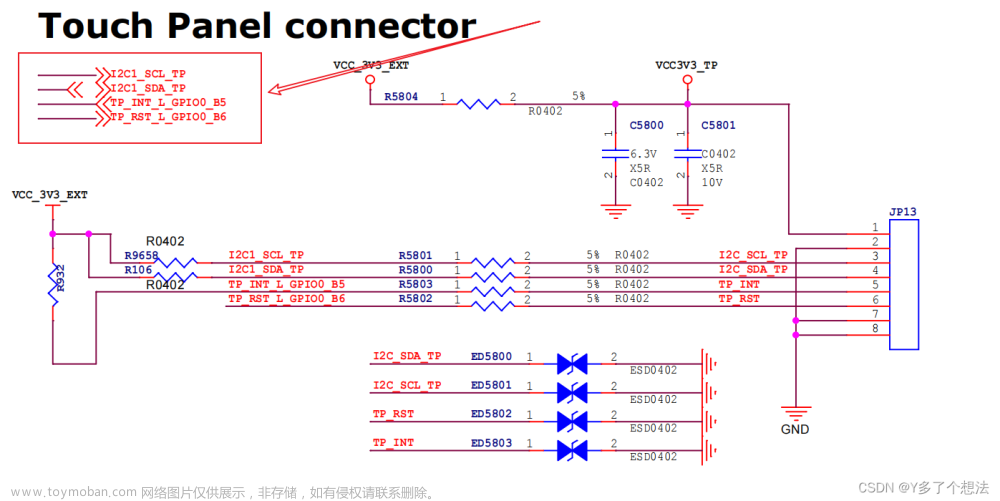
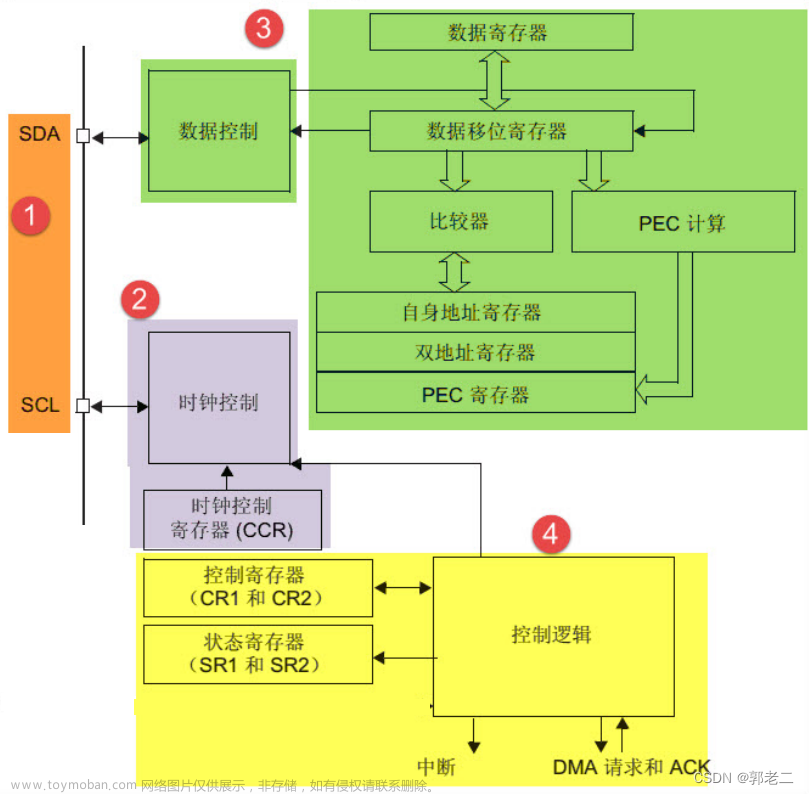
i2c 总线控制器通过串行数据(SDA)线和串行时钟 (SCL)线在连接到总线的器件间传递信息。
i2c总线一些特征:
-
只有两根线分别是串行数据线(SDA),串行时钟线(SCL)。
-
每个器件都有一个唯一的地址识别
-
使用串行8位双向数据传输方式。
-
可以使用普通GPIO口模拟I2C,但要需要将GPIO配置成OD模式(开漏模式)
3. 芯片i2c资源
RK3588旗舰芯片上可使用的I2C有9组,ArmSoM SOM-3588-LGA核心板采用LGA 506引脚封装方式将I2C资源全部引出,ArmSoM-W3板子上接有部分i2c外设以及40PIN资源如下:


4. i2c使用
RK3588使用I2C 的驱动是i2c-rk3x.c,参考文件 kernel/Documentation/devicetree/bindings/i2c/i2c-rk3x.txt。
4.1 DTS配置
i2c资源使用只需要在设备树下进行配置,例如上述RTC芯片的配置如下:
&i2c6 {
status = "okay";
//i2c-scl-rising-time-ns = <265>;
//i2c-scl-falling-time-ns = <11>;
//clock-frequency = <400000>;
hym8563: hym8563@51 {
compatible = "haoyu,hym8563";
reg = <0x51>;
#clock-cells = <0>;
clock-frequency = <32768>;
clock-output-names = "hym8563";
pinctrl-names = "default";
pinctrl-0 = <&rtc_int>;
interrupt-parent = <&gpio0>;
interrupts = <RK_PB0 IRQ_TYPE_LEVEL_LOW>;
};
};
参数说明:
- clock-frequency: 默认 frequency 为 100k 可不配置,其它 I2C 频率需要配置,最大可配置频率由i2c-scl-rising-time-ns 决定;例如配置 400k,clock-frequency=<400000>。
- i2c-scl-rising-time-ns:SCL 上升沿时间由硬件决定,例如测得 SCL 上升沿 365ns,i2c-scl-rising-time-ns=<365>。(默认可以不配置)
- i2c-scl-falling-time-ns: SCL 下降沿时间, 一般不变, 等同于 i2c-sda-falling-time-ns。(默认也可以不配置)
在使用i2c设备树配置的时候,有些方面需要注意:
1.上述rtc使用的引脚是I2C6_SDA_M0和I2C6_SCL_M0,硬件接口有些可以使用I2C6_SDA_M1,或者I2C6_SDA_M3,要修改默认配置
i2c6: i2c@fec80000 {
compatible = "rockchip,rk3588-i2c", "rockchip,rk3399-i2c";
reg = <0x0 0xfec80000 0x0 0x1000>;
clocks = <&cru 146>, <&cru 138>;
clock-names = "i2c", "pclk";
interrupts = <0 323 4>;
pinctrl-names = "default";
pinctrl-0 = <&i2c6m0_xfer>;//&i2c6m1_xfer、&i2c6m3_xfer
#address-cells = <1>;
#size-cells = <0>;
status = "disabled";
};
-
i2c地址主要由7bit的二进制数值组成,最低位是读写标志位,0表示写,1表示读
比如:读,0A3H 写,0A2H
在linux驱动中要取这个ic设备的从设备地址,就是0xA3或者0xA2右移一位得到
4.2 GPIO 模拟 I2C
I2C 用 GPIO 模拟,内核已经有实现,请参考文档:Documentation/devicetree/bindings/i2c/i2c-gpio.txt
下面是使用的例子,dts 下配置 I2C 节点。
i2c@4 {
compatible = "i2c-gpio";
gpios = <&gpio5 9 GPIO_ACTIVE_HIGH>, /* sda */
<&gpio5 8 GPIO_ACTIVE_HIGH>; /* scl */
i2c-gpio,delay-us = <2>; /* ~100 kHz */
#address-cells = <1>;
#size-cells = <0>;
pinctrl-names = "default";
pinctrl-0 = <&i2c4_gpio>;
status = "okay";
gt9xx: gt9xx@14 {
compatible = "goodix,gt9xx";
reg = <0x14>;
touch-gpio = <&gpio5 11 IRQ_TYPE_LEVEL_LOW>;
reset-gpio = <&gpio5 10 GPIO_ACTIVE_HIGH>;
max-x = <1200>;
max-y = <1900>;
tp-size = <911>;
tp-supply = <&vcc_tp>;
status = "okay";
};
};
一般不推荐使用 GPIO,效率不高。
5. 检查i2c设备
5.1 IIC 第三方工具
I2C tool 是一个开源工具,需自行下载进行交叉编译,代码下载地址:
https://www.kernel.org/pub/software/utils/i2c-tools/或者<git clone git://git.kernel.org/pub/scm/utils/i2c-tools/i2c-tools.git>
编译后会生成 i2cdetect,i2cdump,i2cset,i2cget 等工具,可以直接在命令行上调试使用,I2C tool 是开源的,编译与使用参考里面的 README 与帮助说明。
ArmSoM-W3板子对应的出厂固件已经在系统下集成了这个工具,可以直接使用,比如扫描I2C总线上的RTC设备:
root@linaro-alip:~# i2cdetect -y 6
0 1 2 3 4 5 6 7 8 9 a b c d e f
00: -- -- -- -- -- -- -- --
10: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
20: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
30: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
40: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
50: -- UU -- -- -- -- -- -- -- -- -- -- -- -- -- --
60: -- -- -- -- -- -- -- -- -- -- -- -- -- -- -- --
70: -- -- -- -- -- -- -- --
root@linaro-alip:~#
扫描到对应的RTC芯片的I2C地址为0X51
常用的命令还有以下几个。
#检测当前系统有几组i2c总线
i2cdetect -l
#查看i2c-0接口上的设备
i2cdetect -a 6
#读取指定设备的全部寄存器的值。
i2cdump -f -y 6 0x51
#读取指定IIC设备的某个寄存器的值,如下读取地址为0x51器件中的0x01寄存器值。
i2cget -f -y 6 0x51 0x01
#写入指定IIC设备的某个寄存器的值,如下设置地址为0x51器件中的0x01寄存器值为0x1a;
i2cset -f -y 3 0x51 0x01 0x1a
5.2 RTC使用
Linux系统下包含两个时间:系统时间和RTC时间。
linux命令中的date和time等命令都是用来设置系统时间的,而hwclock命令是用来设置和读写RTC时间的。
root@linaro-alip:~# hwclock -r
2018-05-24 16:38:13.115443+00:00 //查看硬件时间
root@linaro-alip:~# date
2018年 05月 24日 星期四 16:38:21 UTC //查看系统时间
root@linaro-alip:~# date -s "2023-10-24 11:45:00"
2023年 10月 24日 星期二 11:45:00 UTC //重新设置系统时间
root@linaro-alip:~# hwclock -w //同步系统时间到rtc上,掉电不丢失时间
root@linaro-alip:~# hwclock -r
2023-10-24 11:45:17.694727+00:00
5.3 I2C 常见问题
如果调用 I2C 传输接口返回值为 -6(-ENXIO)时候,表示为 NACK 错误,即对方设备无应答响应

这种情况一般为外设的问题,常见的有以下几种情况:
-
I2C 地址错误;
-
I2C slave 设备处于不正常工作状态,比如没有上电,错误的上电时序以及设备异常等;
-
I2C 时序不符合 slave 设备所要求也会产生 NACK 信号,比如 slave 设备需要的是 stop 信号,而不是
repeat start 信号的时候;
-
I2C 总线受外部干扰导致的,用示波器测量可以看到是一个 ACK 波形。
当出现 I2C 的 log 类似:"timeout, ipd: 0x80, state: 1"时,看到 ipd 为 0x80 打印,可以说明当前 SCL 被
slave 拉住,要判断被哪个 slave 拉住:
一是排除法,适用于外设不多的情况,而且复现概率高;
二是需要修改硬件,在 SCL 总线上串入电阻,通过电阻两端产生的压差来确定,电压更低的那端
外设为拉低的 slave,电阻的选取以不影响 I2C 传输且可以看出压差为标准,一般上拉电阻的 1/20
以上都可以,如果是 host 拉低也可以看出。
常见的情况是 sda 被拉低,证明是谁拉低的。
有时候i2c初始化有问题时速率可以降低看有没有改善。遇到的 I2C 问题最好的办法是抓取 I2C 出错时候的波形,通过波形来分析 I2C 问
题,I2C 的波形非常有用,大部分的问题都能分析出来。
6. 读取eeprom数据实验
本章介绍通过IIC接口读写eeprom(AT24C08)的数据。 本次实验会以i2c-7做为示例,接其他i2c引脚操作也是一样的 当然,并不是只能用这个eeprom这个模组,这只是做个简单的示例,如果您没有这个模块,可以通过学习操作eeprom的方式操作您想要操作的i2c设备。
6.1 硬件连接
将eeprom接入到ArmSoM-W3开发板的i2c-7的总线上,如下图所示

| 板子 | eeprom |
|---|---|
| 3.3V(1) | VCC |
| GND(39) | GND |
| SCL(5) | SCL |
| SDA(3) | SCA |
6.2 软件配置
在文件kernel\arch\arm64\boot\dts\rockchip\rk3588-armsom-w3.dts文件下添加下面代码:
&i2c7 {
pinctrl-names = "default";
pinctrl-0 = <&i2c7m3_xfer>;
clock-frequency = <100000>;
status = "okay";
eeprom@50 {
status = "okay";
compatible = "at,24c08";
reg = <0x50>;
};
};
eeprom驱动在drivers/misc/eeprom/下面,如果是其他i2c接口芯片在kernel目录下没有驱动,可以去对找对应芯片厂商提供驱动文件

将eeprom的驱动编译进内核测试
6.3 读写数据测试
找到模块位置:
root@linaro-alip:~# find / -name "at24"
/sys/bus/i2c/drivers/at24
读eeprom内容:

写eeprom内容:文章来源:https://www.toymoban.com/news/detail-745631.html
 文章来源地址https://www.toymoban.com/news/detail-745631.html
文章来源地址https://www.toymoban.com/news/detail-745631.html
到了这里,关于ArmSom---I2C开发指南的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!