一、SG90舵机开发
舵机基本介绍
二、Linux定时器
- signal 函数
- setitimer 函数原型
- signal、setitimer函数API调用
三、舵机 软件PWM实现
一、SG90舵机开发
舵机基本介绍
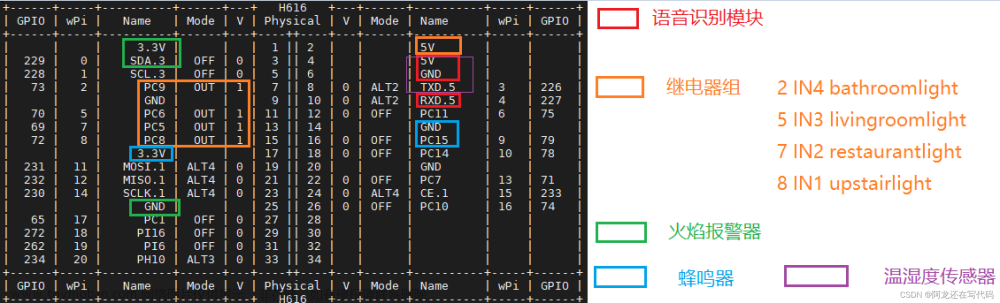
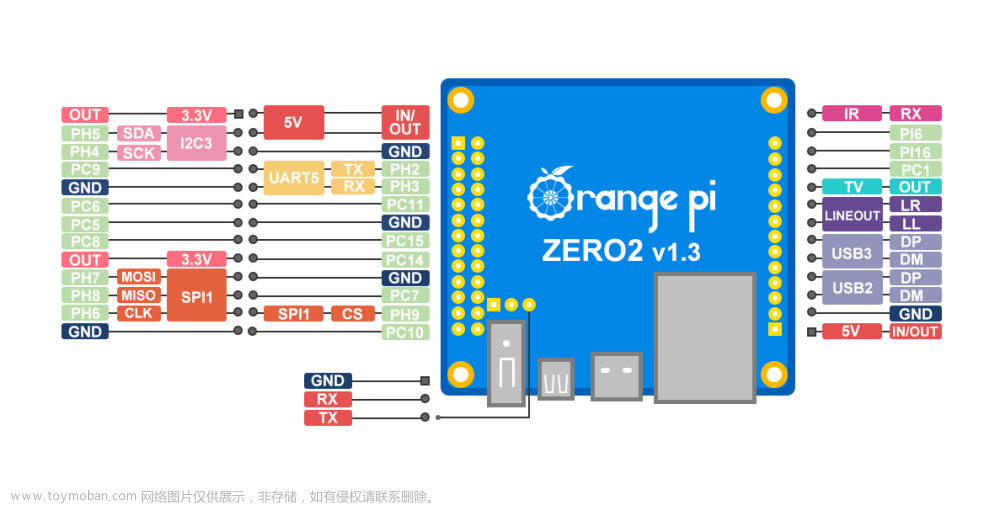
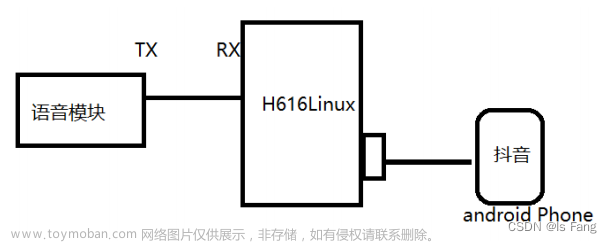
如下图所示,最便宜的舵机sg90,常用三根或者四根接线,黄色为PWM信号控制用处:
垃圾桶项目开盖用、智能小车的全比例转向、摄像头云台、机械臂等
常见的有0-90°、0-180°、0-360°
怎么控制转角
向黄色信号线“灌入”PWM信号。
PWM波的频率不能太高,50hz,即周期=1/频率=1/50=0.02s,20ms左右数据:
不同的PWM波形对应不同的旋转角度,以20ms为周期,50hz为频率的PWM波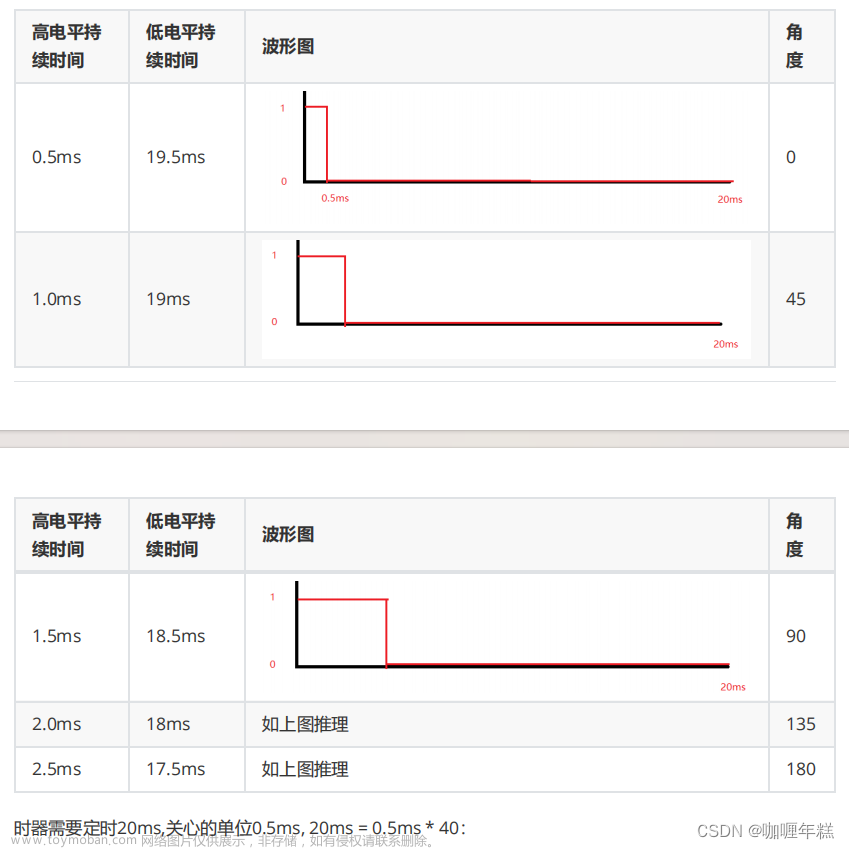
二、Linux定时器
signal 函数
signal 函数是一个用于设置信号处理函数的C标准库函数,可用于捕获和处理信号。信号是在UNIX和类UNIX操作系统中用于通知进程发生了特定事件的一种异步通知机制。signal 函数的原型如下:
#include <signal.h>
void (*signal(int signum, void (*handler)(int)))(int);
参数说明:
-
signum:要捕获和处理的信号的编号,它是一个整数,如SIGINT(中断信号)、SIGTERM(终止信号)等。 -
handler:一个函数指针,指向你自己编写的信号处理函数,用于处理接收到的信号。
signal 函数允许你为指定的信号注册一个自定义的处理函数,该处理函数会在程序接收到相应的信号时被调用。处理函数的原型如下:
void handler_function(int signum);
示例用法:
#include <stdio.h>
#include <stdlib.h>
#include <signal.h>
// 自定义信号处理函数
void sigint_handler(int signum) {
printf("Received SIGINT (Ctrl+C) signal. Exiting...\n");
exit(0);
}
int main() {
// 注册自定义信号处理函数,用于捕获SIGINT信号(Ctrl+C)
signal(SIGINT, sigint_handler);
printf("Press Ctrl+C to trigger the custom signal handler.\n");
while (1) {
// 无限循环等待信号
}
return 0;
}
在上述示例中,signal 函数用于注册一个自定义的信号处理函数 sigint_handler,用于捕获 SIGINT 信号(通常由Ctrl+C触发)。当用户按下Ctrl+C时,程序会执行自定义处理函数,然后退出。这使你能够在程序中捕获和处理特定的信号,以采取适当的行动。不同的信号有不同的用途,可以用于控制程序的行为。
setitimer 函数原型
分析:实现定时器,通过itimerval结构体以及函数setitimer产生的信号,系统随之使用signal信号处理函数
来处理产生的定时信号。从而实现定时器。
setitimer 是一个UNIX系统上的系统调用函数,用于设置和管理定时器。它通常用于定期触发信号或执行某些操作。setitimer 函数的原型如下:
#include <sys/time.h>
int setitimer(int which, const struct itimerval *new_value, struct itimerval *old_value);
参数说明:
-
which:指定要设置的定时器类型,可以是ITIMER_REAL、ITIMER_VIRTUAL或ITIMER_PROF中的一个。-
ITIMER_REAL:以实际时间计时,通常用于实现定时器功能。 -
ITIMER_VIRTUAL:以进程的虚拟时间(CPU时间)计时。 -
ITIMER_PROF:以进程的虚拟时间和系统时间(CPU和墙钟时间)计时。
-
-
new_value:一个struct itimerval结构,用于指定新的定时器值。 -
old_value:一个struct itimerval结构,用于存储旧的定时器值(可选参数)。
struct itimerval 结构定义如下:
struct itimerval {
struct timeval it_interval; // 定时器重复的间隔时间
struct timeval it_value; // 定时器的初始值
};
setitimer 允许你设置定时器的初始值和重复间隔。一旦定时器启动,它将在到期时触发一个信号,通常是 SIGALRM 信号。你可以捕获这个信号并执行相应的操作。
示例用法:
#include <stdio.h>
#include <signal.h>
#include <sys/time.h>
void timer_handler(int signum) {
// 定时器到期时触发的处理函数
printf("Timer expired! (Signum: %d)\n", signum);
}
int main() {
struct itimerval timer;
timer.it_value.tv_sec = 1; // 初始定时器值为1秒
timer.it_value.tv_usec = 0;
timer.it_interval.tv_sec = 2; // 重复间隔为2秒
timer.it_interval.tv_usec = 0;
// 设置定时器并关联处理函数
signal(SIGALRM, timer_handler);
setitimer(ITIMER_REAL, &timer, NULL);
// 让程序保持运行
while (1) {
}
return 0;
}
上述示例设置了一个每隔1秒触发一次的定时器,并在定时器到期时触发 SIGALRM 信号,执行 timer_handler 处理函数。你可以根据需要修改定时器的初始值和重复间隔以实现不同的定时任务。
signal、setitimer函数API调用
/*该代码实现的功能是: 1s后开启定时器,然后每隔1s向终端打印hello。*/
#include <stdio.h>
#include <sys/time.h>
#include <stdlib.h>
#include <signal.h>
static int i;
void signal_handler(int signum)
{
i++;
if (i == 2000){
printf("hello\n");
i = 0;
}
}
int main()
{
struct itimerval itv;
//设定定时时间
itv.it_interval.tv_sec = 0;
itv.it_interval.tv_usec = 500;
//设定开始生效,启动定时器的时间
itv.it_value.tv_sec = 1;
itv.it_value.tv_usec = 0;
//设定定时方式
if (setitimer(ITIMER_REAL, &itv, NULL) == -1){
perror("error");
exit(-1);
}
//信号处理
signal(SIGALRM, signal_handler);
while(1);
return 0;
}
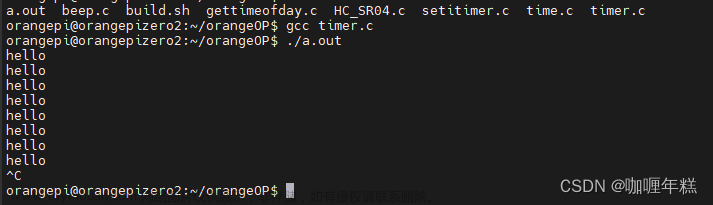
这种方法需要注意的是,一个进程只能创建一个定时器
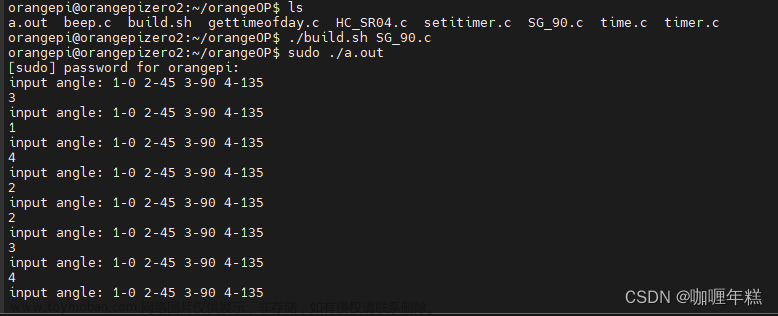
三、舵机 软件PWM实现
SG90编程实现:键盘输入不同的值,让舵机转动,软件PWM实现
#include <stdio.h>
#include <sys/time.h>
#include <stdlib.h>
#include <signal.h>
#include <wiringPi.h>
#define SG90Pin 5
int angle;
static int i = 0;
void signal_handler(int signum)
{
if(i <= angle){
digitalWrite(SG90Pin, HIGH);
}else{
digitalWrite(SG90Pin, LOW);
}
if (i == 40){
i = 0;
}
i++;
}
int main()
{
struct itimerval itv;
angle = 0;
wiringPiSetup();
pinMode(SG90Pin, OUTPUT);
//设定定时时间0.5ms
itv.it_interval.tv_sec = 0;
itv.it_interval.tv_usec = 500;
//设定开始生效,启动定时器的时间
itv.it_value.tv_sec = 1;
itv.it_value.tv_usec = 0;
//设定定时方式
if (setitimer(ITIMER_REAL, &itv, NULL) == -1){
perror("error");
exit(-1);
}
//信号处理
signal(SIGALRM, signal_handler);
while (1){
printf("input angle: 1-0 2-45 3-90 4-135 5-180.\n");
scanf("%d", &angle);
}
return 0;
}
 文章来源:https://www.toymoban.com/news/detail-745734.html
文章来源:https://www.toymoban.com/news/detail-745734.html
转圈圈文章来源地址https://www.toymoban.com/news/detail-745734.html
到了这里,关于【Orangepi Zero2 全志H616】驱动舵机控制 / Linux定时器(signal、setitimer)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!
![[ARM+Linux] 基于全志h616外设开发笔记](https://imgs.yssmx.com/Uploads/2024/01/419966-1.png)