目录
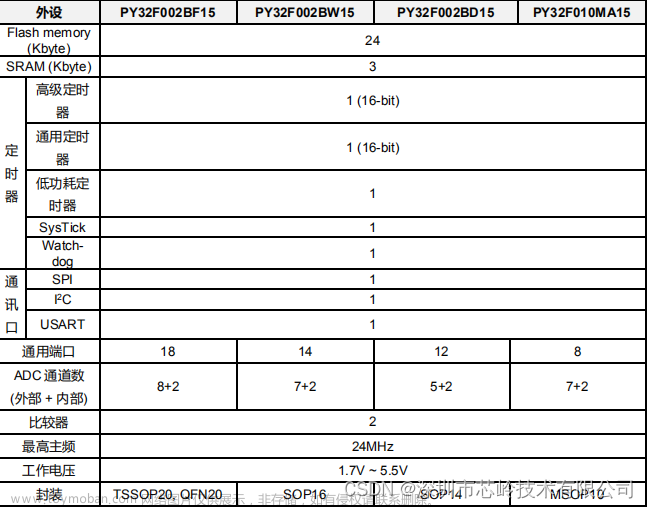
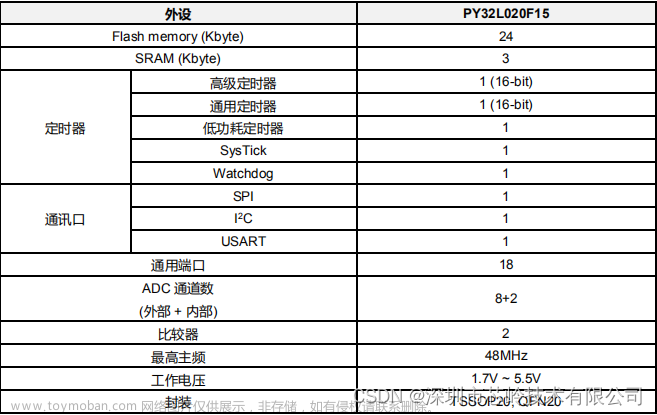
- 普冉PY32系列(一) PY32F0系列32位Cortex M0+ MCU简介
- 普冉PY32系列(二) Ubuntu GCC Toolchain和VSCode开发环境
- 普冉PY32系列(三) PY32F002A资源实测 - 这个型号不简单
- 普冉PY32系列(四) PY32F002A/003/030的时钟设置
- 普冉PY32系列(五) 使用JLink RTT代替串口输出日志
- 普冉PY32系列(六) 通过I2C接口驱动PCF8574扩展的1602LCD
- 普冉PY32系列(七) SOP8,SOP10,SOP16封装的PY32F002A/PY32F003管脚复用
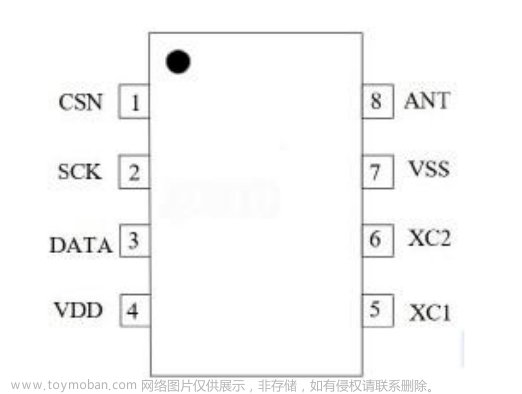
- 普冉PY32系列(八) GPIO模拟和硬件SPI方式驱动无线收发芯片XN297LBW
- 普冉PY32系列(九) GPIO模拟和硬件SPI方式驱动无线收发芯片XL2400
- 普冉PY32系列(十) 基于PY32F002A的6+1通道遥控小车I - 综述篇
- 普冉PY32系列(十一) 基于PY32F002A的6+1通道遥控小车II - 控制篇
- 普冉PY32系列(十二) 基于PY32F002A的6+1通道遥控小车III - 驱动篇
基于PY32F002A的6+1通道遥控小车II - 控制篇
这篇继续介绍6+1通道遥控小车的控制端, 关于遥控手柄的硬件和软件设计的说明
PCB实物
正面
在嘉立创下单了PCB, 收到的是这个样子的.
- PCB中二极管的位置稍微偏上, 存在与螺丝短接的风险, 在新的PCB设计中已经将其下移.
- 无线模块的天线没有覆漆, 在LCEDA中不知道怎么修改. PCB做出来是焊盘的效果(上锡了), 不影响使用.

背面
因为空间限制, PY32F002A和74HC595/165都放到了背面

分割后的各个模块

遥控面板成品
遥控面板的焊接过程运气不错, 从贴片到接插件都是一次成功, 没有返工.
正面
- 空间限制, 只比一张名片稍微大点, 布局比较局促.
- LCD因为是裸片没有托板, 和背光板一起是用热熔胶直接固定在PCB上的.

LCD试车, 显示没问题

背面
- 正面基本上全是接插件, 如果PY32F002A放到这面, 将来万一烧坏更换非常麻烦, 所以贴片元件都放到了背面
- 电源接口用的是XH2.54
- LCD背光担心电流过大, 补焊串了一颗1KR的电阻

LCD控制界面
这是最终的LCD控制界面
- 上面两道横杆代表旋钮的模拟量
- 中间和下方的四道横杆代表摇杆的模拟量
- 两边的6个数字代表了模拟量的数值, 都是8bit, 从0 - 255
- 下方的8个方格代表了8个开关量, 高亮(黑)代表按键按下(低电压), 正常(白)代表按键松开(高电压)

软件设计
整体结构
因为只考虑发送, 所以控制端的流程较为简单, 做一个大循环肯定可行, 采集数据 -> 发送数据 -> 采集数据 -> 发送数据. 如果要提升大循环的效率, 因为LCD显示和无线发送共用SPI, 需要保留在大循环, ADC可以用定时器触发做成DMA, 节省出ADC的时间.
最终使用的执行流程是
- 使用一个
uint8_t pad_state[8]存储6+1通道的数据 - ADC使用定时器触发, 通过DMA存储转换结果到6个双字节内存地址, ADC DMA转换完成后
- 将结果转为8bit, 存入 pad_state,
- 收集74HC165的按键状态, 合成一个byte 也存入pad_state
- 计算CRC并存至 pad_state 最后一个字节
- 外层大循环读取 pad_state
- 更新LCD显示
- 通过无线发送数据
主循环
int main(void)
{
// ...
/* Infinite loop */
while(1)
{
// 更新LCD显示
DRV_Display_Update(pad_state);
// 发送
wireless_tx++;
if (XL2400_Tx(pad_state, XL2400_PLOAD_WIDTH) == 0x20)
{
wireless_tx_succ++;
}
// 每 255 次发送, 打印一次成功次数, 用于标识成功率
if (wireless_tx == 0xFF)
{
wireless_state[10] = wireless_tx_succ;
DEBUG_PRINTF("TX_SUCC: %02X\r\n", wireless_tx_succ);
wireless_tx = 0;
wireless_tx_succ = 0;
}
// 延迟可以调节
LL_mDelay(20);
}
}
DMA中断
void DMA1_Channel1_IRQHandler(void)
{
uint8_t crc = 0;
if (LL_DMA_IsActiveFlag_TC1(DMA1) == 1)
{
LL_DMA_ClearFlag_TC1(DMA1);
// 转换DMA读数为uint8_t并存入pad_state
for (uint8_t i = 0; i < 6; i++)
{
pad_state[i] = (uint8_t)(*(adc_dma_data + i) >> 4);
crc += pad_state[i];
}
// 从 74HC165 读取按键状态
pad_state[6] = HC165_Read();
// 存入CRC结果
pad_state[7] = crc + pad_state[6];
}
}
无线通讯
无线部分使用的是硬件SPI驱动的 XL2400, 代码可以参考
https://github.com/IOsetting/py32f0-template/tree/main/Examples/PY32F0xx/LL/SPI/XL2400_Wireless
传输的数据格式为固定长度8字节
#define XL2400_PLOAD_WIDTH 8 // Payload width
其中字节[0, 5]为6个ADC采集的数值结果, 字节[6]为74HC165采集的按键结果, 字节[7]为CRC校验.
收发的地址是固定的(将来需要改进)
const uint8_t TX_ADDRESS[5] = {0x11,0x33,0x33,0x33,0x11};
const uint8_t RX_ADDRESS[5] = {0x33,0x55,0x33,0x44,0x33};
输入采集
ADC采集
DMA初始化
void MSP_DMA_Config(void)
{
LL_AHB1_GRP1_EnableClock(LL_AHB1_GRP1_PERIPH_DMA1);
LL_APB1_GRP2_EnableClock(LL_APB1_GRP2_PERIPH_SYSCFG);
// Remap ADC to LL_DMA_CHANNEL_1
LL_SYSCFG_SetDMARemap_CH1(LL_SYSCFG_DMA_MAP_ADC);
// Transfer from peripheral to memory
LL_DMA_SetDataTransferDirection(DMA1, LL_DMA_CHANNEL_1, LL_DMA_DIRECTION_PERIPH_TO_MEMORY);
// Set priority
LL_DMA_SetChannelPriorityLevel(DMA1, LL_DMA_CHANNEL_1, LL_DMA_PRIORITY_HIGH);
// Circular mode
LL_DMA_SetMode(DMA1, LL_DMA_CHANNEL_1, LL_DMA_MODE_CIRCULAR);
// Peripheral address no increment
LL_DMA_SetPeriphIncMode(DMA1, LL_DMA_CHANNEL_1, LL_DMA_PERIPH_NOINCREMENT);
// Memory address increment
LL_DMA_SetMemoryIncMode(DMA1, LL_DMA_CHANNEL_1, LL_DMA_MEMORY_INCREMENT);
// Peripheral data alignment : 16bit
LL_DMA_SetPeriphSize(DMA1, LL_DMA_CHANNEL_1, LL_DMA_PDATAALIGN_HALFWORD);
// Memory data alignment : 16bit
LL_DMA_SetMemorySize(DMA1, LL_DMA_CHANNEL_1, LL_DMA_MDATAALIGN_HALFWORD);
// Data length
LL_DMA_SetDataLength(DMA1, LL_DMA_CHANNEL_1, 6);
// Sorce and target address
LL_DMA_ConfigAddresses(DMA1, LL_DMA_CHANNEL_1, (uint32_t)&ADC1->DR, (uint32_t)adc_dma_data, LL_DMA_GetDataTransferDirection(DMA1, LL_DMA_CHANNEL_1));
// Enable DMA channel 1
LL_DMA_EnableChannel(DMA1, LL_DMA_CHANNEL_1);
// Enable transfer-complete interrupt
LL_DMA_EnableIT_TC(DMA1, LL_DMA_CHANNEL_1);
NVIC_SetPriority(DMA1_Channel1_IRQn, 0);
NVIC_EnableIRQ(DMA1_Channel1_IRQn);
}
ADC初始化
void MSP_ADC_Init(void)
{
__IO uint32_t backup_setting_adc_dma_transfer = 0;
LL_APB1_GRP2_EnableClock(LL_APB1_GRP2_PERIPH_ADC1);
LL_ADC_Reset(ADC1);
// Calibrate start
if (LL_ADC_IsEnabled(ADC1) == 0)
{
/* Backup current settings */
backup_setting_adc_dma_transfer = LL_ADC_REG_GetDMATransfer(ADC1);
/* Turn off DMA when calibrating */
LL_ADC_REG_SetDMATransfer(ADC1, LL_ADC_REG_DMA_TRANSFER_NONE);
LL_ADC_StartCalibration(ADC1);
while (LL_ADC_IsCalibrationOnGoing(ADC1) != 0);
/* Delay 1ms(>= 4 ADC clocks) before re-enable ADC */
LL_mDelay(1);
/* Apply saved settings */
LL_ADC_REG_SetDMATransfer(ADC1, backup_setting_adc_dma_transfer);
}
// Calibrate end
/* PA0 ~ PA5 as ADC input */
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_0, LL_GPIO_MODE_ANALOG);
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_1, LL_GPIO_MODE_ANALOG);
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_2, LL_GPIO_MODE_ANALOG);
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_3, LL_GPIO_MODE_ANALOG);
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_4, LL_GPIO_MODE_ANALOG);
LL_GPIO_SetPinMode(GPIOA, LL_GPIO_PIN_5, LL_GPIO_MODE_ANALOG);
/* Set ADC channel and clock source when ADEN=0, set other configurations when ADSTART=0 */
LL_ADC_SetCommonPathInternalCh(__LL_ADC_COMMON_INSTANCE(ADC1), LL_ADC_PATH_INTERNAL_NONE);
LL_ADC_SetClock(ADC1, LL_ADC_CLOCK_SYNC_PCLK_DIV2);
LL_ADC_SetResolution(ADC1, LL_ADC_RESOLUTION_12B);
LL_ADC_SetDataAlignment(ADC1, LL_ADC_DATA_ALIGN_RIGHT);
LL_ADC_SetLowPowerMode(ADC1, LL_ADC_LP_MODE_NONE);
LL_ADC_SetSamplingTimeCommonChannels(ADC1, LL_ADC_SAMPLINGTIME_41CYCLES_5);
/* Set TIM1 as trigger source */
LL_ADC_REG_SetTriggerSource(ADC1, LL_ADC_REG_TRIG_EXT_TIM1_TRGO);
LL_ADC_REG_SetTriggerEdge(ADC1, LL_ADC_REG_TRIG_EXT_RISING);
/* Single conversion mode (CONT = 0, DISCEN = 0), performs a single sequence of conversions, converting all the channels once */
LL_ADC_REG_SetContinuousMode(ADC1, LL_ADC_REG_CONV_SINGLE);
LL_ADC_REG_SetDMATransfer(ADC1, LL_ADC_REG_DMA_TRANSFER_UNLIMITED);
LL_ADC_REG_SetOverrun(ADC1, LL_ADC_REG_OVR_DATA_OVERWRITTEN);
/* Enable: each conversions in the sequence need to be triggerred separately */
LL_ADC_REG_SetSequencerDiscont(ADC1, LL_ADC_REG_SEQ_DISCONT_DISABLE);
/* Set channel 0/1/2/3/4/5 */
LL_ADC_REG_SetSequencerChannels(ADC1, LL_ADC_CHANNEL_0 | LL_ADC_CHANNEL_1 | LL_ADC_CHANNEL_2 | LL_ADC_CHANNEL_3 | LL_ADC_CHANNEL_4 | LL_ADC_CHANNEL_5);
LL_ADC_Enable(ADC1);
// Start ADC regular conversion
LL_ADC_REG_StartConversion(ADC1);
}
用于触发ADC的TIM1定时器初始化
void MSP_TIM1_Init(void)
{
LL_TIM_InitTypeDef TIM1CountInit = {0};
// RCC_APBENR2_TIM1EN == LL_APB1_GRP2_PERIPH_TIM1
LL_APB1_GRP2_EnableClock(RCC_APBENR2_TIM1EN);
TIM1CountInit.ClockDivision = LL_TIM_CLOCKDIVISION_DIV1;
TIM1CountInit.CounterMode = LL_TIM_COUNTERMODE_UP;
// 系统时钟48MHz, 预分频8K, 预分频后定时器时钟为6KHz
TIM1CountInit.Prescaler = (SystemCoreClock / 6000) - 1;
// 每600次计数一个周期, 每秒10个周期, 可以减小数值提高频率
TIM1CountInit.Autoreload = 600 - 1;
TIM1CountInit.RepetitionCounter = 0;
LL_TIM_Init(TIM1, &TIM1CountInit);
/* Triggered by update */
LL_TIM_SetTriggerOutput(TIM1, LL_TIM_TRGO_UPDATE);
LL_TIM_EnableCounter(TIM1);
}
开关量采集
74HC165的状态读取
uint8_t HC165_Read(void)
{
uint8_t i, data = 0;
HC165_LD_LOW; // Pull down LD to load parallel inputs
HC165_LD_HIGH; // Pull up to inhibit parallel loading
for (i = 0; i < 8; i++)
{
data = data << 1;
HC165_SCK_LOW;
HC165_NOP; // NOP to ensure reading correct value
if (HC165_DATA_READ)
{
data |= 0x01;
}
HC165_SCK_HIGH;
}
return data;
}
74HC165的示例代码, 可以参考 https://github.com/IOsetting/py32f0-template/tree/main/Examples/PY32F0xx/LL/GPIO/74HC165_8bit_Parallel_In_Serial_Out
LCD显示
PY32F002A驱动ST7567的示例代码可以参考 Examples/PY32F0xx/LL/SPI/ST7567_128x64LCD, 但是这个示例, 包括GitHub上可以搜到的其它示例, 都是使用 128 x 8 的内存作为显示缓存, 通过读写这块缓存再将缓存内容写入 ST7567 实现的显示内容更新. 这种方式可以实现非常灵活的显示, 缺点就是需要占用1KB的内存. 对于STM32F103这类有16KB或20KB内存的控制器, 1KB内存不算什么, 但是 PY32F002A 只有4KB内存, 1KB就值得考虑一下了. 因为遥控部分的数显, 显示格式相对固定, page之间可以相互独立, 没有相互交叠的部分, 启动后只需要显示滑动条和读数, 因此完全可以采用直接输出的方式.
换成直接输出后就变成这样的显示函数了, 定制LCD显示是比较费时费事的一步.
移动光标到坐标
void ST7567_SetCursor(uint8_t page, uint8_t column)
{
ST7567_WriteCommand(ST7567_SET_PAGE_ADDRESS | (page & ST7567_SET_PAGE_ADDRESS_MASK));
ST7567_WriteCommand(ST7567_SET_COLUMN_ADDRESS_MSB | ((column + ST7567_X_OFFSET) >> 4));
ST7567_WriteCommand(ST7567_SET_COLUMN_ADDRESS_LSB | ((column + ST7567_X_OFFSET) & 0x0F));
}
指定宽度和偏移量, 填入固定内容
static void DRV_DrawRepeat(uint8_t symbol, uint8_t width, uint8_t offset, uint8_t colorInvert)
{
symbol = symbol << offset;
symbol = colorInvert? ~symbol : symbol;
ST7567_TransmitRepeat(symbol, width);
}
画出横条
static void DRV_DrawHorizBar(uint8_t page, uint8_t column, uint8_t size)
{
ST7567_SetCursor(page, column);
DRV_DrawRepeat(0x7E, 1, 0, 0);
DRV_DrawRepeat(0x42, size, 0, 0);
DRV_DrawRepeat(0x7E, 1, 0, 0);
}
在横条中画出高亮滑块
static void DRV_DrawHorizBarCursor(uint8_t page, uint8_t column, uint8_t value, uint8_t barWidth, uint8_t cursorWidth, uint8_t direction)
{
value = direction? value : 255 - value;
ST7567_SetCursor(page, column + 1);
DRV_DrawRepeat(0x42, barWidth, 0, 0);
ST7567_SetCursor(page, column + 1 + (value * (barWidth - cursorWidth) / 255));
DRV_DrawRepeat(0x7E, cursorWidth, 0, 0);
}
画出竖条和竖条光标的方法更复杂, 这里就不贴代码了.
在main函数的while循环中, 每次会更新LCD显示文章来源:https://www.toymoban.com/news/detail-746814.html
void DRV_Display_Update(uint8_t *state)
{
// 更新按键显示
DRV_DrawKeyState(*(state + 6));
// 更新4个横条的显示
DRV_DrawHorizBarCursor(0, 10, *(state + 4), 50, 4, 0);
DRV_DrawHorizBarCursor(0, 65, *(state + 5), 50, 4, 1);
DRV_DrawHorizBarCursor(7, 0, *(state + 1), 60, 4, 0);
DRV_DrawHorizBarCursor(7, 65, *(state + 2), 60, 4, 1);
// 更新2个竖条显示, 因为竖条处于多个page, 每次更新显示都需要全部重绘
DRV_DrawVertiBar(0, 1, 52);
DRV_DrawVertiBarCursor(0, 1, 52, *(state + 0), 4, 0);
DRV_DrawVertiBar(121, 1, 52);
DRV_DrawVertiBarCursor(121, 1, 52, *(state + 3), 4, 1);
// 输出6个模拟通道的数值(0 ~ 255)
DRV_DrawNumber(1, 10, *(state + 4));
DRV_DrawNumber(1, 100, *(state + 5));
DRV_DrawNumber(4, 10, *(state + 0));
DRV_DrawNumber(4, 100, *(state + 3));
DRV_DrawNumber(5, 10, *(state + 1));
DRV_DrawNumber(5, 100, *(state + 2));
}
用直接写入的方式, 在不开JLink RTT 的情况下, 整机内存只需要不到400个字节, 资源节约效果明显.文章来源地址https://www.toymoban.com/news/detail-746814.html
到了这里,关于普冉PY32系列(十一) 基于PY32F002A的6+1通道遥控小车II - 控制篇的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!