整体流程:
1.首先现在rtsp-server服务器(如果采用的是虚拟机或者是服务器,可以下载对应的linux服务器),我下载的是图片上的两个版本。下载完毕后直接打开文件夹下的mediamtx.exe
Releases · bluenviron/mediamtx (github.com)

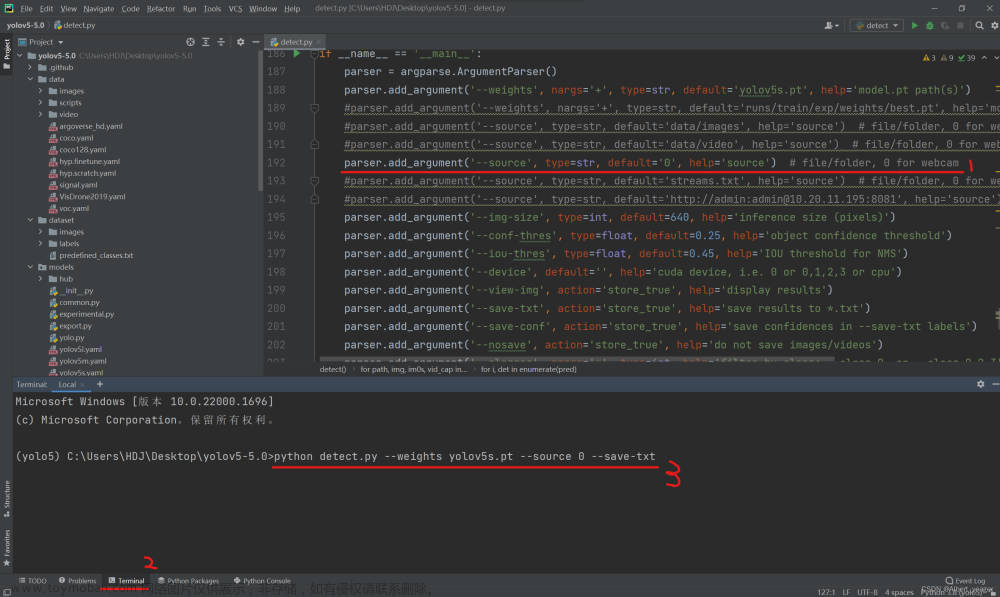
2.在代码中执行main.py函数
rtmp_server = 'rtmp://你的主机ip:1935/video'
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--imgpath', type=str, default='video/test.mp4', help="image path")
parser.add_argument('--modelpath', type=str, default='models/yolov7-tiny_384x640.onnx',
choices=["models/yolov7_640x640.onnx", "models/yolov7-tiny_640x640.onnx",
"models/yolov7_736x1280.onnx", "models/yolov7-tiny_384x640.onnx",
"models/yolov7_480x640.onnx", "models/yolov7_384x640.onnx",
"models/yolov7-tiny_256x480.onnx", "models/yolov7-tiny_256x320.onnx",
"models/yolov7_256x320.onnx", "models/yolov7-tiny_256x640.onnx",
"models/yolov7_256x640.onnx", "models/yolov7-tiny_480x640.onnx",
"models/yolov7-tiny_736x1280.onnx", "models/yolov7_256x480.onnx"],
help="onnx filepath")
parser.add_argument('--confThreshold', default=0.3, type=float, help='class confidence')
parser.add_argument('--nmsThreshold', default=0.5, type=float, help='nms iou thresh')
args = parser.parse_args()
# Initialize YOLOv7 object detector
yolov7_detector = YOLOv7(args.modelpath, conf_thres=args.confThreshold, iou_thres=args.nmsThreshold)
VID_FORMATS = ['asf', 'avi', 'gif', 'm4v', 'mkv', 'mov', 'mp4', 'mpeg', 'mpg', 'wmv'] # include video suffixes
imgpath = args.imgpath
print(imgpath.split('.')[-1])
if imgpath.split('.')[-1] in VID_FORMATS:
cap = cv2.VideoCapture(0)
pusher = StreamPusher(rtmp_server)
while True:
success, srcimg = cap.read()
srcimg = imutils.resize(srcimg, width=640)
t1 = time.time()
boxes, scores, class_ids = yolov7_detector.detect(srcimg)
print(time.time() - t1) # 测量处理一帧图像的时间 用于评估模型的处理速度或性能(推理时间)
# Draw detections
dstimg = yolov7_detector.draw_detections(srcimg, boxes, scores, class_ids)
print(time.time() - t1) # 测量了模型的推理时间以及绘制检测结果的时间
winName = 'Deep learning object detection in OpenCV'
# cv2.namedWindow(winName, 0)
# cv2.imshow(winName, dstimg)
cv2.waitKey(1)
pusher.streamPush(dstimg)
cv2.destroyAllWindows()
else:
srcimg = cv2.imread(args.imgpath)
# Detect Objects
t1 = time.time()
boxes, scores, class_ids = yolov7_detector.detect(srcimg)
print(time.time() - t1)
# Draw detections
dstimg = yolov7_detector.draw_detections(srcimg, boxes, scores, class_ids)
print(time.time() - t1)
winName = 'Deep learning object detection in OpenCV'
cv2.namedWindow(winName, 0)
cv2.imshow(winName, dstimg)
cv2.waitKey(0)
cv2.destroyAllWindows()3.采用vlc拉流:

4.代码解析
a.定义推流器:我在用的是ffmpeg进行推流,在虚拟环境中使用pip安装ffmpeg包
class StreamPusher:
def __init__(self, rtmp_url): #接受一个参数rtmq_url 该参数受用于指定rtmq服务器地址的字符串
# 创建FFmpeg命令行参数
ffmpeg_cmd = ['ffmpeg',
'-y', # 覆盖已存在的文件
'-f', 'rawvideo', #指定输入格式为原始视频帧数据
'-pixel_format', 'bgr24', #指定输入数据的像素格式为BGR24(一种图像颜色编码格式)
'-video_size', '640x480', #指定输入视频的尺寸为640*480
'-i', '-', # 从标准输入读取数据
'-c:v', 'libx264', #指定视频编码器为libx264(H.264编码器)
'-preset', 'ultrafast', #使用ultrafast预设,以获得更快的编码速度
'-tune', 'zerolatency', #使用zerolatency调整 以降低延迟
'-pix_fmt', 'yuv420p', #指定输出视频像素格式为yuv420p
'-f', 'flv', #指定输出格式为FLV
rtmp_url] #指定输出目标为‘rtmp_url' 即RTMP服务器地址
print('ffmpeg_cmd:', ffmpeg_cmd)
# 启动 ffmpeg
self.ffmepg_process = subprocess.Popen(ffmpeg_cmd, stdin=subprocess.PIPE)
def streamPush(self, frame): #用于推送视频帧数据到FFmpeg进程
self.ffmepg_process.stdin.write(frame.tobytes())b.采用onnx格式文件来封装yolo的模型权重文件(可以去github上下载yolo源码生成.onnx文件),因为onnx只是模型和权重文件,其他一些的后处理组件要自己定义,具体如下:
class YOLOv7:
def __init__(self, path, conf_thres=0.7, iou_thres=0.5):
self.conf_threshold = conf_thres
self.iou_threshold = iou_thres
self.class_names = list(map(lambda x: x.strip(), open('coco.names', 'r').readlines()))
# Initialize model
self.session = onnxruntime.InferenceSession(path, providers=['CUDAExecutionProvider', 'CPUExecutionProvider'])
model_inputs = self.session.get_inputs()
self.input_names = [model_inputs[i].name for i in range(len(model_inputs))]
self.input_shape = model_inputs[0].shape
self.input_height = self.input_shape[2]
self.input_width = self.input_shape[3]
model_outputs = self.session.get_outputs()
self.output_names = [model_outputs[i].name for i in range(len(model_outputs))]
self.has_postprocess = 'score' in self.output_names
def detect(self, image):
input_tensor = self.prepare_input(image)
# Perform inference on the image
outputs = self.session.run(self.output_names, {self.input_names[0]: input_tensor})
if self.has_postprocess:
boxes, scores, class_ids = self.parse_processed_output(outputs)
else:
# Process output data
boxes, scores, class_ids = self.process_output(outputs)
return boxes, scores, class_ids
def prepare_input(self, image):
self.img_height, self.img_width = image.shape[:2]
input_img = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)
# Resize input image
input_img = cv2.resize(input_img, (self.input_width, self.input_height))
# Scale input pixel values to 0 to 1
input_img = input_img / 255.0
input_img = input_img.transpose(2, 0, 1)
input_tensor = input_img[np.newaxis, :, :, :].astype(np.float32)
return input_tensor
def process_output(self, output):
predictions = np.squeeze(output[0]) #输出一个多维数组
# Filter out object confidence scores below threshold
obj_conf = predictions[:, 4]
predictions = predictions[obj_conf > self.conf_threshold]
obj_conf = obj_conf[obj_conf > self.conf_threshold]
# Multiply class confidence with bounding box confidence
predictions[:, 5:] *= obj_conf[:, np.newaxis]
# Get the scores
scores = np.max(predictions[:, 5:], axis=1)
# Filter out the objects with a low score
valid_scores = scores > self.conf_threshold
predictions = predictions[valid_scores]
scores = scores[valid_scores]
# Get the class with the highest confidence
class_ids = np.argmax(predictions[:, 5:], axis=1)
# Get bounding boxes for each object
boxes = self.extract_boxes(predictions)
# Apply non-maxima suppression to suppress weak, overlapping bounding boxes
# indices = nms(boxes, scores, self.iou_threshold)
nms_indices = cv2.dnn.NMSBoxes(boxes.tolist(), scores.tolist(), self.conf_threshold, self.iou_threshold)
indices = np.array(nms_indices).flatten().astype(int)
return boxes[indices], scores[indices], class_ids[indices]
def parse_processed_output(self, outputs):
scores = np.squeeze(outputs[self.output_names.index('score')])
predictions = outputs[self.output_names.index('batchno_classid_x1y1x2y2')]
# Filter out object scores below threshold
valid_scores = scores > self.conf_threshold
predictions = predictions[valid_scores, :]
scores = scores[valid_scores]
# Extract the boxes and class ids
# TODO: Separate based on batch number
batch_number = predictions[:, 0]
class_ids = predictions[:, 1]
boxes = predictions[:, 2:]
# In postprocess, the x,y are the y,x
boxes = boxes[:, [1, 0, 3, 2]]
# Rescale boxes to original image dimensions
boxes = self.rescale_boxes(boxes)
return boxes, scores, class_ids
def extract_boxes(self, predictions):
# Extract boxes from predictions
boxes = predictions[:, :4]
# Scale boxes to original image dimensions
boxes = self.rescale_boxes(boxes)
# Convert boxes to xywh format
boxes_ = np.copy(boxes)
boxes_[..., 0] = boxes[..., 0] - boxes[..., 2] * 0.5
boxes_[..., 1] = boxes[..., 1] - boxes[..., 3] * 0.5
return boxes_
def rescale_boxes(self, boxes):
# Rescale boxes to original image dimensions
input_shape = np.array([self.input_width, self.input_height, self.input_width, self.input_height])
boxes = np.divide(boxes, input_shape, dtype=np.float32)
boxes *= np.array([self.img_width, self.img_height, self.img_width, self.img_height])
return boxes
def draw_detections(self, image, boxes, scores, class_ids):
for box, score, class_id in zip(boxes, scores, class_ids):
x, y, w, h = box.astype(int)
# Draw rectangle
cv2.rectangle(image, (x, y), (x+w, y+h), (0, 0, 255), thickness=2)
label = self.class_names[class_id]
label = f'{label} {int(score * 100)}%'
labelSize, baseLine = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
# top = max(y1, labelSize[1])
# cv.rectangle(frame, (left, top - round(1.5 * labelSize[1])), (left + round(1.5 * labelSize[0]), top + baseLine), (255,255,255), cv.FILLED)
cv2.putText(image, label, (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), thickness=2)
return image
3.采用cap = cv2.VideoCapture(0)读取本地摄像头,针对每帧进行目标检测算法然后进行推流:
if imgpath.split('.')[-1] in VID_FORMATS:
cap = cv2.VideoCapture("rtmp://:1935/stream")
pusher = StreamPusher(rtmp_server)
while True:
success, srcimg = cap.read()
srcimg = imutils.resize(srcimg, width=640)
t1 = time.time()
boxes, scores, class_ids = yolov7_detector.detect(srcimg)
print(time.time() - t1) #测量处理一帧图像的时间 用于评估模型的处理速度或新能(推理时间)
# Draw detections
dstimg = yolov7_detector.draw_detections(srcimg, boxes, scores, class_ids)
print(time.time() - t1) #测量了模型的推理时间以及绘制检测结果的时间
winName = 'Deep learning object detection in OpenCV'
#cv2.namedWindow(winName, 0)
#cv2.imshow(winName, dstimg)
cv2.waitKey(1)
pusher.streamPush(dstimg)
cv2.destroyAllWindows()
else:
srcimg = cv2.imread(args.imgpath)
# Detect Objects
t1 = time.time()
boxes, scores, class_ids = yolov7_detector.detect(srcimg)
print(time.time() - t1)
# Draw detections
dstimg = yolov7_detector.draw_detections(srcimg, boxes, scores, class_ids)
print(time.time() - t1)
winName = 'Deep learning object detection in OpenCV'
cv2.namedWindow(winName, 0)
cv2.imshow(winName, dstimg)
cv2.waitKey(0)
cv2.destroyAllWindows()效果展示:

以上代码借鉴了很多博主的文章,具体的忘记了。如有冒犯,多多谅解!
代码地址:
GitHub - 23jisuper/yolov7-ffmpeg: 基于yolov5目标检测,使用ffmpeg推流 vlc拉流文章来源:https://www.toymoban.com/news/detail-753935.html
后续工作:
目标检测模型采用的是cpu进行推理的,可以采用GPU加速推理。整个代码是根据python实现的,考虑采用C++代替来提高速度。文章来源地址https://www.toymoban.com/news/detail-753935.html
到了这里,关于Yolov5、rtsp-server、ffmpeg、vlc,实现实时检测视频推拉流的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!