💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现
💥1 概述
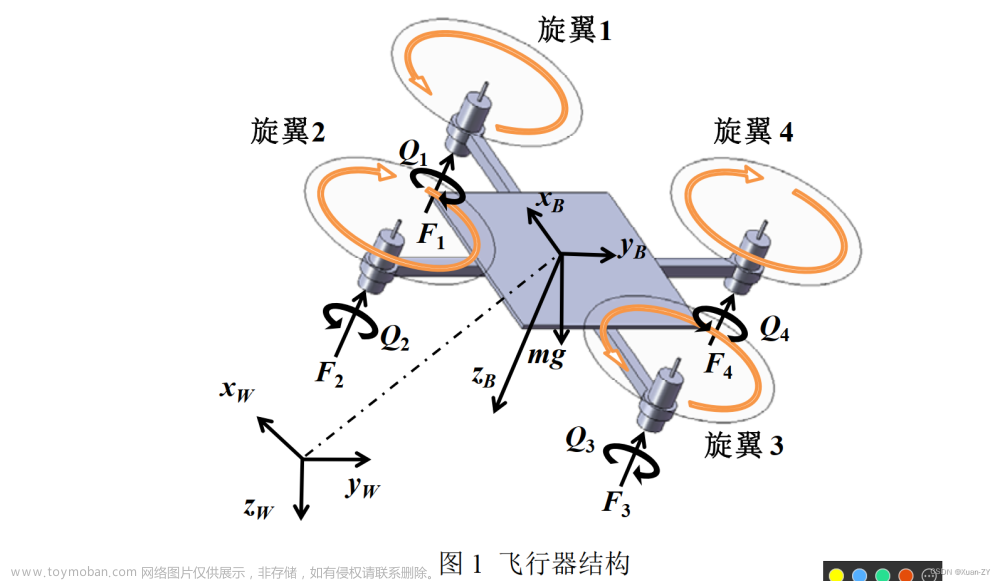
四旋翼飞行器是一种能够垂直起降和悬停的飞行器,由四个独立的旋翼推进器提供动力。它们通常被用于航拍、搜救和军事应用等领域。而悬链机器人是一种由缆绳悬挂并由外部推动的机器人,常用于高空作业和建筑清洁等领域。
设计和控制由两个四旋翼飞行器推动的缆绳研究,可以将两个四旋翼飞行器连接在一起,通过缆绳将它们与悬链机器人连接。这样的设计可以使悬链机器人具有更强的动力和稳定性,从而提高其在高空作业和其他领域的应用效率。
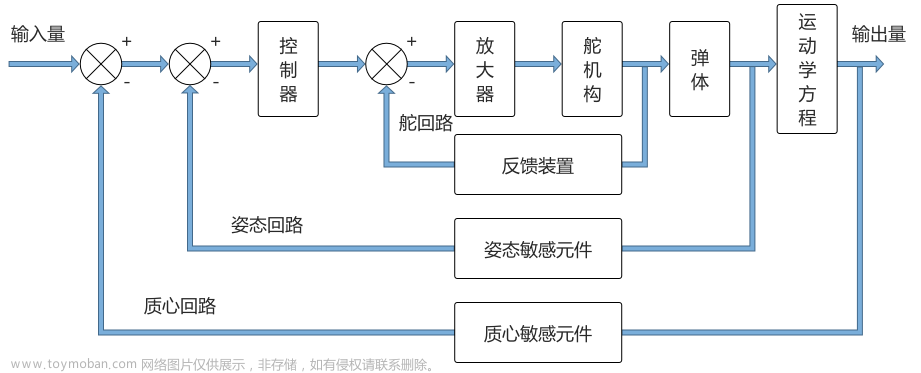
在控制方面,需要设计一套复杂的控制系统来协调两个四旋翼飞行器的动作,确保它们能够有效地推动悬链机器人并保持平衡。这可能涉及到对飞行器的姿态控制、飞行路径规划和动力分配等方面的研究。
综上,设计和控制由两个四旋翼飞行器推动的缆绳研究是一项复杂而具有挑战性的工作,但它有望为悬链机器人的应用带来新的突破和进展。通过充分发挥四旋翼飞行器的优势,可以为悬链机器人赋予更大的动力和灵活性,从而拓展其在各种领域的应用范围。
📚2 运行结果




部分代码:
%% plot function
function plott(t,x,xdA,posA_err_fx,velA_err_fx, xdB,posB_err_fx,velB_err_fx, xC, xdC,params)
disp('Plotting graphs...');
index = round(linspace(1, length(t), round(1*length(t))));
figure(1);
subplot(3,1,1);
plot(t(index),x(index,1),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
% plot(t(index),xdA(index,1),':r','LineWidth',2);
plot(t(index),x(index,19),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
% plot(t(index),xdB(index,1),':r','LineWidth',2);
plot(t(index),xC(index,1),'b','LineWidth',2);
plot(t(index),xdC(index,1),':r','LineWidth',2);
hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');%axis equal;
ylabel('$x(m)$','Interpreter','latex');set(gca,'xticklabel',[])
subplot(3,1,2);
plot(t(index),x(index,2),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
% plot(t(index),xdA(index,2),':r','LineWidth',2);
plot(t(index),x(index,20),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
% plot(t(index),xdB(index,2),':r','LineWidth',2);
plot(t(index),xC(index,2),'b','LineWidth',2);
plot(t(index),xdC(index,2),':r','LineWidth',2);hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');
ylabel('$y(m)$','Interpreter','latex');set(gca,'xticklabel',[])
subplot(3,1,3);
plot(t(index),x(index,3),'Color',[0.3010 0.7450 0.9330],'LineWidth',2); hold on;
plot(t(index),x(index,21),'Color',[0.9290 0.6940 0.1250],'LineWidth',2);
plot(t(index),xC(index,3),'b','LineWidth',2);
plot(t(index),xdC(index,3),':r','LineWidth',2);hold off;
%axis equal;
grid on;
legend('$x_A$','$x_B$','$x_C$','$x_C$ desired','Interpreter','latex');
xlabel('$t(s)$','Interpreter','latex');ylabel('$z(m)$','Interpreter','latex');
print('../results/FigTrajectory','-dpng')
figure(2)
plot3(x(index,1),x(index,2),x(index,3),'-b','LineWidth',2); hold on;
plot3(xdA(index,1),xdA(index,2),xdA(index,3),'-.r','LineWidth',3.5);
plot3(x(index,19),x(index,20),x(index,21),'-k','LineWidth',2);
plot3(xdB(index,1),xdB(index,2),xdB(index,3),':r','LineWidth',3.5);
plot3(xC(index,1),xC(index,2),xC(index,3),'Color',[0.4660 0.6740 0.1880],'LineWidth',2);
plot3(xdC(index,1),xdC(index,2),xdC(index,3),'or','LineWidth',5);
plot3(x(end,1),x(end,2),x(end,3),'ok','LineWidth',4);
plot3(x(end,19),x(end,20),x(end,21),'ok','LineWidth',4);
plot3(x(1,1),x(1,2),x(1,3),'or','LineWidth',2);
plot3(x(1,19),x(1,20),x(1,21),'or','LineWidth',2);
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]宋曜先.四旋翼无人飞行器编队控制算法的研究[D].杭州电子科技大学[2023-11-22].DOI:CNKI:CDMD:2.1017.133374.
[2]庞庆霈,李家文,黄文浩.四旋翼飞行器设计与平稳控制仿真研究[J].电光与控制, 2012, 19(3):5.DOI:10.3969/j.issn.1671-637X.2012.03.012.文章来源:https://www.toymoban.com/news/detail-755079.html
[3]曹健,丁力.四旋翼飞行器的动态滑模轨迹跟踪控制研究[J].组合机床与自动化加工技术, 2019(8):5.DOI:CNKI:SUN:ZHJC.0.2019-08-022.文章来源地址https://www.toymoban.com/news/detail-755079.html
🌈4 Matlab代码实现
到了这里,关于【四旋翼飞行器】【模拟悬链机器人的动态】设计和控制由两个四旋翼飞行器推动的缆绳研究(Matlab代码实现)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!