74HC595 芯片介绍文章来源:https://www.toymoban.com/news/detail-756630.html
74HC595 是一个 8 位串行输入、并行输出的位移缓存器,其中并行输出为三 态输出(即高电平、低电平和高阻抗)。芯片管脚及功能说明如下:图1文章来源地址https://www.toymoban.com/news/detail-756630.html

上面两张都是 74HC595 芯片管脚图,细心的朋友就会发现左侧的 1 脚是 QB, 而右侧芯片的 1 脚是 Q1,左侧芯片的 11 脚是 SCK,而右侧芯片的 11 脚是 SH_CP, 还有很多其他管脚不一样,其实这个都没有什么,每个人在绘制芯片管脚图时命 名可能不一样而已,看一个芯片重点是管脚功能。(
小白学习小计:刚开始学习的时候,以为上面两张图是一起的,搞得纠结了好久,才明白这是两张独立的4HC595 芯片管脚图,只是名称不一样,管脚,功能是一样的
)
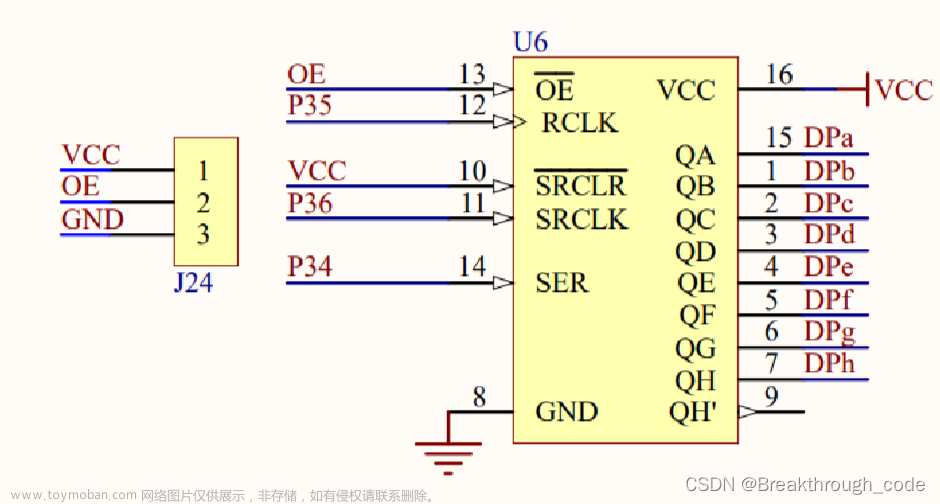
15 和 1 到 7 脚 QA--QH:并行数据输出9 脚 QH 非:串行数据输出10 脚 SCLK 非( MR) : 低电平复位引脚11 脚 SCK( SHCP) : 移位寄存器时钟输入12 脚 RCK( STCP) : 存储寄存器时钟输入13 脚 G 非( OE) : 输出有效14 脚 SER( DS) : 串行数据输入
74HC595 是具有 8 位移位寄存器和一个存储器,三态输出功能。移位寄存器 和存储器是单独的时钟。数据在 SCK 的上升沿输入,在 RCK 的上升沿进入到存 储器中。如果两个时钟连在一起,则移位寄存器总是比存储器早一个脉冲。移位 寄存器有一个串行输入(DS),和一个串行输出(Q7 非),和一个异步的低电 平复位,存储寄存器有一个并行 8 位的,具有三态的总线输出,当 MR 为高电 平,OE 为低电平时,数据在 SHCP 上升沿进入移位寄存器,在 STCP 上升沿输 出到并行端口。
硬件设计:
本实验使用到硬件资源如下:
(1)8*8LED 点阵模块
(2)74HC595 模块
开发板上的 74HC595 模块电路如下图所示:图2(1)74HC595 模块
)(2)8*8LED 点阵模块

从上图中可以看出,74HC595 需要用到的控制管脚 SER、RCLK、SRCLK 直接连 接到 51 单片机的 P3.4-P3.6 IO 口上,输出端则是直接连接到 LED 点阵模块的行 端口上,即为 LED 发光二极管的阳极,LED 点阵的列则为发光二极管的阴极。
要想控制 LED 点阵,可以将单片机管脚按照 74HC595 芯片的通信时序要求来 传输数据,这样即可控制 LED 点阵的行数据。根据 LED 发光二极管导通原理,当 阳极为高电平,阴极为低电平则点亮,否则熄灭。因此通过单片机 P0 口可控制 点阵列,74HC595 可控制点阵行。
- 小白学习小计:
- 1,图2先刨开点阵的图不管,只看74HC595图,从图1我们得知,15 和 1 到 7 脚 QA--QH:并行数据输出,对应图2的5 和 1 到 7 脚,就是QA---AH是并行输出数据,
- 2,对应图1我们就可以知道:11 脚 SRCLK : 移位寄存器时钟输入。12 脚 RCLK : 存储 寄 存器时钟输入 。13 脚 G 非( OE) : 输出有效 。14 脚 SER( DS): 串行数据输入
- 3,此时得知14 脚 SER( DS) : 串行数据输入,7/Q7(QH)是一个串行输出。意思就是从 14 脚输入,到1脚输出.
- 4,SER输入的数据在 SHCP 上升沿进入移位寄存器,在 STCP 上升沿才能输出输出到并行 端口7脚(QH)。
- 5,输入输出逻辑就是,从14 脚 SER输入数据,储存到移位寄存器11 脚 SRCLK ,在通过移位寄存器传输到存储寄存器12 脚 RCLK,在通过存储寄存器传输给QH
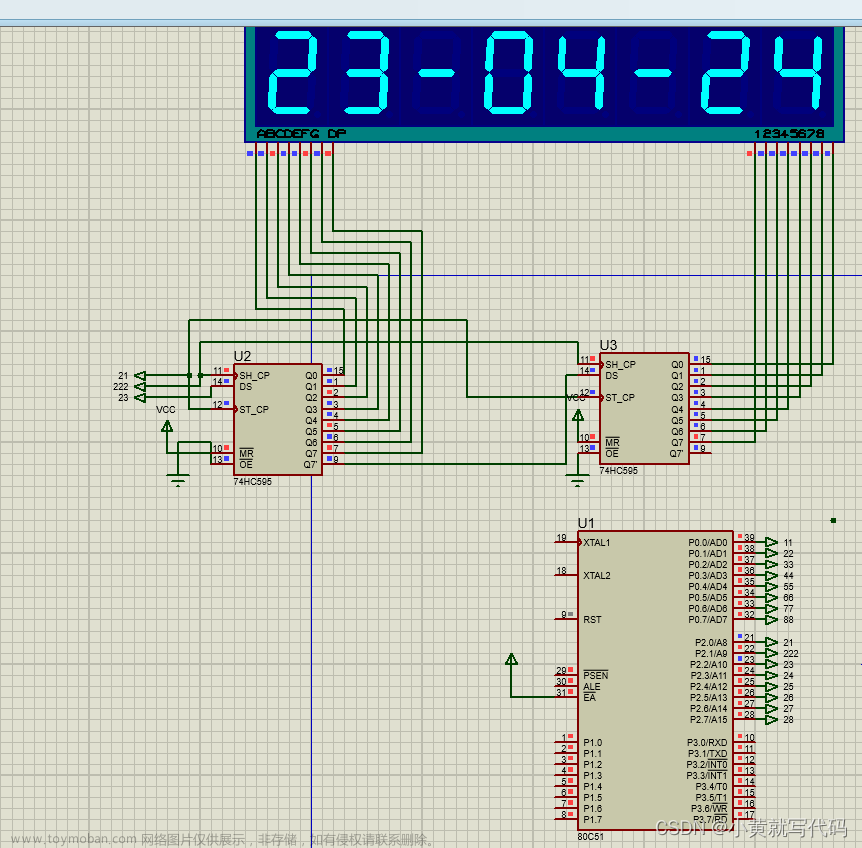
- 6,从图2,15 和 1 到 7 脚连接到LED的DPa--DPh,所用通过控制15 和 1 到 7 脚就可以控制LED灯
- 7,这里把QA--QH看成一个字节八位的二进制(0000 0000),芯片工作时候通过向SER传入这个二进制数据来控制QA--QH,QA到QH输出SER的八位。QA为最低位,QH为最高位,例如我们给QH传入高电平就是10000000(0x80)、SER数据的每一位在SRCLK的时钟脉冲上升沿每上升一次存储一位数据在寄存器SCK中,在RCLK上升沿时一次性传输到存储器RCK中(这里怎么看QA为最低位,QH为最高位,我还不知道,哪位知道怎么看留言哈)

软件设计:
通过 74HC595 模块控制 LED 点阵以一行循环滚动显 示。代码如下:每行根据自己的理解都写了解释,请仔细阅读,不对的地方请指出。谢谢
/********************************************************************
****************** 实验名称:IO 扩展(串转并)实验-74HC595
接线说明
实验现象:下载程序后,8*8LED 点阵以一行循环滚动显示
注意事项:LED 点阵旁的 J24 黄色跳线帽短接到 GND 一端
*********************************************************************
******************/
#include "reg52.h"
typedef unsigned int u16; //对系统默认数据类型进行重定义
typedef unsigned char u8;
//定义 74HC595 控制管脚
sbit SRCLK=P3^6; //移位寄存器时钟输入
sbit rCLK=P3^5; //存储寄存器时钟输入
sbit SER=P3^4; //串行数据输入
#define LEDDZ_COL_PORT P0 //宏定义LED点阵列控制端口
//定义ghc595_buf[]数组把每次输出的数据储存在里面,传入到hc595_write_data函数
u8 ghc595_buf[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
/********************************************************************
***********
* 函 数 名 : delay_10us
* 函数功能 : 延时函数,ten_us=1 时,大约延时 10us
* 输 入 : ten_us
* 输 出 : 无
*********************************************************************
**********/
void delay_10us(u16 ten_us)
{
while(ten_us--);
}
/********************************************************************
***********
* 函 数 名 : delay_ms
* 函数功能 : ms 延时函数,ms=1 时,大约延时 1ms
* 输 入 : ten_us
* 输 出 : 无
* for(j=110;j>0;j--)在for(i=ms;i>0;i--)嵌套这,delay_ms(500),
* 时候ms=500,i=ms 所以i=500,进入for(i=ms;i>0;i--),
* 然后在执行for(j=110;j>0;j--),进行循环110次一直到j=0,
* 在退出for(j=110;j>0;j--),
* 在重新执行for(i=ms;i>0;i--),一直到到i=0时候,退出for(i=ms;i>0;i--)
*********************************************************************
**********/
void delay_ms(u16 ms)
{
u16 i,j;
for(i=ms;i>0;i--)
for(j=110;j>0;j--);
}
/********************************************************************
***********
* 函 数 名 : hc595_write_data(u8 dat)
* 函数功能 : 向 74HC595 写入一个字节的数据
* 输 入 : dat:数据
* 输 出 : 无
*********************************************************************
**********/
/********************************************************************
*******************SER=dat>>7(dat向右移7位后赋值给SER)详解*************
dat是后面要输入的一个字节的数据,hc595_write_data(0x00)如后面的
hc595_write_data(0x01),这时候dat就是(0x01)当dat=00000001(0x01)时候,
高位是0,低位是1 ,对应按照QH-QA,就是QH低电平,QA高电平,但是74HC595的传输
规律是先从高位在到低位的传输,左移1就传给了QH,这样QH高电平,QA为低电平,我们
想要QH输入低电平怎么办呢?就用把dat>>7,按照右移的规则(对于不带字符的数值,
向右移位时,会在左边的空位填充0。)那(0x01)就变成0(0X00)一个字节八位都是0
这样传输给QH就是低电平,
*********************************************************************
**********/
/********************************************************************
*******************dat<<=1(dat向左移一位后在赋值给dat)详解*************
但是for(i=0;i<8;i++)循环8次,八位就都是0,QH-QA都是低电平,这样是不对的,
我们是要QA输入高电平,这时候就需要每次循环的时候dat<<=1,每次SER=dat>>7;
执行完dat<<=1,例如开始dat=(0x01),执行完SER=dat>>7后,在把dat<<=1(dat向
左移一位后在赋值给dat),这样下次在进入SER=dat>>7时候,dat就是dat<<=1(0X02)
一直倒循环到第7次时候dat也左移了7位,dat变成了10000000(0x80),这时候在进入
SER=dat>>7时候,SER就等于1,对应QA传输,就按照hc595_write_data(0x01)的一样
低位1,其余都是0的输入。
*********************************************************************
**********/
/********************************************************************
*******************SRCLK=0,SRCLK=1详解*******************************
74HC595芯片的传输规则,SER写入数据后,要移位寄存器(SRCLK)时钟上升沿,才能把
数据送到存储寄存器进行输出,所有我们要先给SRCLK一个低电平,在给一个高电平,就产
生了上升沿,那我们就先SRCLK=0送入低电平;中间延时下,在SRCLK=1送入高电平,
一低一高,这样就产生时钟上升沿,就把数据送入到存储寄存器,每次循环都送入存储寄存器,
循环8次,就把8位的数据都送到存储寄存器中了。
中间的delay_10us(1);这里的延时,不要也可以,但是以防出错这里延时下
*********************************************************************
**********/
/********************************************************************
*******************rCLK=0,rCLK=1详解*******************************
74HC595芯片的传输规则,如果将前面写入存储寄存器数据输出,那存储寄存器时钟要
上升沿才能输出,那我们就先rCLK=0送入低电平;中间延时下,在rCLK=1送入高电平,
一低一高,这样产生时钟上升沿,就将前面写入到寄存器的数据输出了。
中间的delay_10us(1);这里的延时,不要也可以,但是以防出错这里延时下
*********************************************************************
**********/
void hc595_write_data(u8 dat)
{
u8 i=0;
for(i=0;i<8;i++)//循环 8 次即可将一个字节写入寄存器中
{
SER=dat>>7;//优先传输一个字节中的高位
dat<<=1;//将低位移动到高位
SRCLK=0;
delay_10us(1);
SRCLK=1;
delay_10us(1);//移位寄存器时钟上升沿将端口数据送入寄存器中
}
rCLK=0;
delay_10us(1);
rCLK=1;//存储寄存器时钟上升沿将前面写入到寄存器的数据输出
}
/********************************************************************
***********
* 函 数 名 : main
* 函数功能 : 主函数
* 输 入 : 无
* 输 出 : 无
*********************************************************************
**********/
/********************************************************************
*******************LEDDZ_COL_PORT=0x00详解*******************************
我们在DPa---DPh输入的是高电平,如果我们要将LED灯点亮,我们要把P0端口全部设为低电
平,即 LED 阴极为低电平,前面我们宏定义了P0端口,所以这里LEDDZ_COL_PORT=0x00就可以
*********************************************************************
**********/
/********************************************************************
*******************hc595_write_data(ghc595_buf[i])详解***************
我们定义了,数组ghc595_buf[],把每次输出的数据储存在里面,通过for循环,依次
输出,每次写入新数据之前,要先消除前面输出数据点亮LED进行消影,所以每次在输入
数据之前,我们先把所有DPa---DPh输入低电平,来消除前面寄存器缓存数据,之后在
在写入新的数据:这样就产生了,LED点阵,从下到上,每行依次点亮
*********************************************************************
**********/
void main()
{
u8 i=0;
LEDDZ_COL_PORT=0x00;//将 LED 点阵列全部设置为 0,即 LED 阴极为低电平
while(1)
{
for(i=0;i<8;i++)
{
hc595_write_data(0x00);//消除前面寄存器缓存数据
hc595_write_data(ghc595_buf[i]);//写入新的数据
delay_ms(500);//延时 500ms
}
}
}
代码还是比较简单易懂的,首先定义好 74HC595 控制管脚,以及点阵列控制 口,代码中重新定义了一个 ms 级延时函数 delay_ms,该函数与前面 delay_10us 类似,都是利用循环占用 CPU 起到延时效果。然后又定义了 74HC595 的控制函数 hc595_write_data,该函数完全按照 74HC595 的通信时序要求编写,主要要注意 的是 74HC595 是先传输字节的高位后传输低位,所以需要将字节低位移动到高位 传输,在传输数据时,要注意移位寄存器时钟和存储寄存器时钟的先后顺序,将 要写入的数据先传输到 74HC595 寄存器中,即在准备好每位数据时要将 SRCLK 进行一个上升沿变化,此时即可将数据传输到寄存器内,待循环 8 次即一个字节 传输到寄存器中时,就可以来一个存储时钟上升沿,此时就可以将 74HC595 寄存 器中的数据全部一次传输到 595 端口输出。最后就是在 main 函数中调用 74HC595 的控制函数,将实验中要实现的效果数据写入进去,从而控制 LED 点阵的阳极, 而阴极由 P0 口控制,默认初始化时已经设置为 0,也就是说只要 595 输出高电 平,那么对应的行就会点亮。
到了这里,关于51单片机——IO拓展(串转并)-74HC595 小白详解的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!