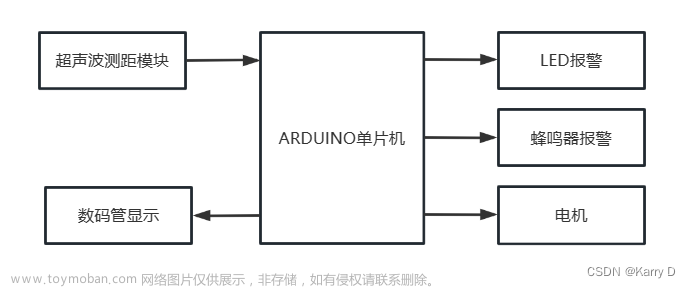
整个系统由AT89C51,超声波电路,显示电路和报警电路,按键控制组成,系统复位后,首先对各模块进行初始化,初始化后根据超声波模块返回的回波进行数据计算,把数据显示到LMO16L液晶显示器上,并与设定的报警值相比较,小于报警值则蜂鸣器响起、指示灯亮,延时判断是否有按键输入修改报警值,修改报警值后继续进行读取超声波测距。
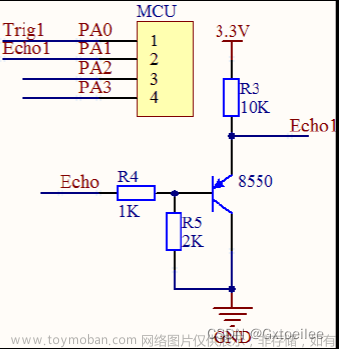
##超声波模块
超声波是由机械振动产生的,可在不同介质中以不同的速度传播,具有良好的定向性,能量集中,传输过程衰减较小,发射能力强等优点。超声波测距是通过不断检测超声波发射后遇到障碍物所反射回来的回波,从而测出从发射到接受回波的时间差T,在速度V已知的情况下,距离S = V*T/2.

1.HC-SR04模块一共有四个引脚,分别是VCC 、TRIG(触发器引脚)、ECHO(接受引脚)、GUD(地线)。
2.基本工作原理:采用IO口TRIG触发测距,至少给10us的高电平信号;模块自动发送8个40khz的方波,自动检测是否有信号返回;有信号返回ECHO输出一个高电平,电平持续的时间就是超声波发射到返回的时间。测试距离=(高电平时间*声速(340m/s))/2
3.定时器计算时间
将TH0和TL0拼接为16进制,需将TH0左移8位
二进制左移一位,01变01(2) 相当于乘2
二进制左移8位,相当于乘以2的8次方=256
time = (TH0*256 + TL0);.//单位为us
##LM016L液晶显示


##protues仿真图

##主流程图文章来源:https://www.toymoban.com/news/detail-758649.html
 文章来源地址https://www.toymoban.com/news/detail-758649.html
文章来源地址https://www.toymoban.com/news/detail-758649.html
#include <reg52.h>
#include <intrins.h>
#define uchar unsigned char // 以后unsigned char就可以用uchar代替
#define uint unsigned int // 以后unsigned int 就可以用uint 代替
sfr ISP_DATA = 0xe2; // 数据寄存器
sfr ISP_ADDRH = 0xe3; // 地址寄存器高八位
sfr ISP_ADDRL = 0xe4; // 地址寄存器低八位
sfr ISP_CMD = 0xe5; // 命令寄存器
sfr ISP_TRIG = 0xe6; // 命令触发寄存器
sfr ISP_CONTR = 0xe7; // 命令寄存器
sbit LcdRs_P = P1^1; // 1602液晶的RS管脚
sbit LcdRw_P = P1^2; // 1602液晶的RW管脚
sbit LcdEn_P = P1^3; // 1602液晶的EN管脚
sbit Trig4_P = P1^4; // 超声波模块4的Trig管脚
sbit Echo4_P = P1^5; // 超声波模块4的Echo管脚
sbit KeySet_P = P2^2; // 设置按键的管脚
sbit KeyDown_P = P2^1; // 减按键的管脚
sbit KeyUp_P = P2^0; // 加按键的管脚
sbit Buzzer_P = P2^3; // 蜂鸣器的管脚
sbit Led4_P = P1^0; // 传感器4报警灯
uint gAlarm; // 报警距离变量
/*********************************************************/
// 单片机内部EEPROM不使能
/*********************************************************/
void ISP_Disable()
{
ISP_CONTR = 0;
ISP_ADDRH = 0;
ISP_ADDRL = 0;
}
/*********************************************************/
// 从单片机内部EEPROM读一个字节,从0x2000地址开始
/*********************************************************/
unsigned char EEPROM_Read(unsigned int add)
{
ISP_DATA = 0x00;
ISP_CONTR = 0x83;
ISP_CMD = 0x01;
ISP_ADDRH = (unsigned char)(add>>8);
ISP_ADDRL = (unsigned char)(add&0xff);
// 对STC89C51系列来说,每次要写入0x46,再写入0xB9,ISP/IAP才会生效
ISP_TRIG = 0x46;
ISP_TRIG = 0xB9;
_nop_();
ISP_Disable();
return (ISP_DATA);
}
/*********************************************************/
// 往单片机内部EEPROM写一个字节,从0x2000地址开始
/*********************************************************/
void EEPROM_Write(unsigned int add,unsigned char ch)
{
ISP_CONTR = 0x83;
ISP_CMD = 0x02;
ISP_ADDRH = (unsigned char)(add>>8);
ISP_ADDRL = (unsigned char)(add&0xff);
ISP_DATA = ch;
ISP_TRIG = 0x46;
ISP_TRIG = 0xB9;
_nop_();
ISP_Disable();
}
/*********************************************************/
// 擦除单片机内部EEPROM的一个扇区
// 写8个扇区中随便一个的地址,便擦除该扇区,写入前要先擦除
/*********************************************************/
void Sector_Erase(unsigned int add)
{
ISP_CONTR = 0x83;
ISP_CMD = 0x03;
ISP_ADDRH = (unsigned char)(add>>8);
ISP_ADDRL = (unsigned char)(add&0xff);
ISP_TRIG = 0x46;
ISP_TRIG = 0xB9;
_nop_();
ISP_Disable();
}
/*********************************************************/
// 毫秒级的延时函数,time是要延时的毫秒数
/*********************************************************/
void DelayMs(uint time)
{
uint i,j;
for(i=0;i<time;i++)
for(j=0;j<112;j++);
}
/*********************************************************/
// 1602液晶写命令函数,cmd就是要写入的命令
/*********************************************************/
void LcdWriteCmd(uchar cmd)
{
LcdRs_P = 0;
LcdRw_P = 0;
LcdEn_P = 0;
P0=cmd;
DelayMs(2);
LcdEn_P = 1;
DelayMs(2);
LcdEn_P = 0;
}
/*********************************************************/
// 1602液晶写数据函数,dat就是要写入的数据
/*********************************************************/
void LcdWriteData(uchar dat)
{
LcdRs_P = 1;
LcdRw_P = 0;
LcdEn_P = 0;
P0=dat;
DelayMs(2);
LcdEn_P = 1;
DelayMs(2);
LcdEn_P = 0;
}
/*********************************************************/
// 液晶光标定位函数
/*********************************************************/
void LcdGotoXY(uchar line,uchar column)
{
// 第一行
if(line==0)
LcdWriteCmd(0x80+column);
// 第二行
if(line==1)
LcdWriteCmd(0x80+0x40+column);
}
/*********************************************************/
// 液晶输出字符串函数
/*********************************************************/
void LcdPrintStr(uchar *str)
{
while(*str!='\0')
LcdWriteData(*str++);
}
/*********************************************************/
// 液晶输出数字
/*********************************************************/
void LcdPrintNum(uint num)
{
LcdWriteData(num/100+0x30); // 百位
LcdWriteData(num%100/10+0x30); // 十位
LcdWriteData(num%10+0x30); // 个位
}
/*********************************************************/
// 1602液晶功能初始化
/*********************************************************/
void LcdInit()
{
LcdWriteCmd(0x38); // 16*2显示,5*7点阵,8位数据口
LcdWriteCmd(0x0C); // 开显示,不显示光标
LcdWriteCmd(0x06); // 地址加1,当写入数据后光标右移
LcdWriteCmd(0x01); // 清屏
}
/*********************************************************/
// 1602液晶显示内容初始化
/*********************************************************/
void LcdShowInit()
{
LcdGotoXY(0,0); // 定位到第0行第0列
LcdPrintStr("L: cm"); // 第0行显示“ U ”
LcdGotoXY(1,0); // 定位到第1行第0列
}
/*********************************************************/
// 计算传感器4测量到的距离
/*********************************************************/
uint GetDistance4(void)
{
uint ss; // 用于记录测得的距离
TH0=0;
TL0=0;
Trig4_P=1; // 给超声波模块4一个开始脉冲
DelayMs(1);
Trig4_P=0;
while(!Echo4_P); // 等待超声波模块4的返回脉冲
TR0=1; // 启动定时器,开始计时
while(Echo4_P); // 等待超声波模块4的返回脉冲结束
TR0=0; // 停止定时器,停止计时
ss=((TH0*256+TL0)*0.034)/2+1; // 距离cm=(时间us * 速度cm/us)/2
return ss;
}
/*********************************************************/
// 按键扫描
/*********************************************************/
void KeyScanf()
{
if(KeySet_P==0) // 判断是否有按键按下
{
LcdGotoXY(0,0); // 光标定位
LcdPrintStr(" Alarm Set "); // 第0行显示“ Alarm Set ”
LcdGotoXY(1,0); // 光标定位
LcdPrintStr(" alarm= cm "); // 第1行显示“ alarm= cm ”
LcdGotoXY(1,8); // 光标定位
LcdPrintNum(gAlarm); // 显示当前的报警值
DelayMs(10); // 消除按键按下的抖动
while(!KeySet_P); // 等待按键释放
DelayMs(10); // 消除按键松开的抖动
while(1)
{
/* 报警值减的处理 */
if(KeyDown_P==0)
{
if(gAlarm>2) // 报警值大于2才能减1
gAlarm--; // 报警值减1
LcdGotoXY(1,8); // 光标定位
LcdPrintNum(gAlarm); // 刷新修改后的报警值
DelayMs(300); // 延时
}
/* 报警值加的处理 */
if(KeyUp_P==0)
{
if(gAlarm<400) // 报警值小于400才能加1
gAlarm++; // 报警值加1
LcdGotoXY(1,8); // 光标定位
LcdPrintNum(gAlarm); // 刷新修改后的报警值
DelayMs(300); // 延时
}
/* 退出报警值设置 */
if(KeySet_P==0)
{
break; // 退出while循环
}
}
LcdShowInit(); // 液晶恢复测量到测量界面
DelayMs(10); // 消除按键按下的抖动
while(!KeySet_P); // 等待按键释放
DelayMs(10); // 消除按键松开的抖动
Sector_Erase(0x2000); // 保存报警距离
EEPROM_Write(0x2000,gAlarm/100);
EEPROM_Write(0x2001,gAlarm%100);
}
}
/*********************************************************/
// 传感器4报警判断
/*********************************************************/
void AlarmJudge4(uint ss)
{
if(ss<gAlarm) // LED灯判断
{
Led4_P=0;
}
else
{
Led4_P=1;
}
if(Led4_P==0) // 蜂鸣器判断
{
Buzzer_P=0;
}
else
{
Buzzer_P=1;
}
}
/*********************************************************/
// 报警值初始化
/*********************************************************/
void AlarmInit()
{
gAlarm=EEPROM_Read(0x2000)*100+EEPROM_Read(0x2001); // 从EEPROM读取报警值
if((gAlarm==0)||(gAlarm>400)) // 如果读取到的报警值异常(等于0或大于400则认为异常)
{
gAlarm=25; // 重新赋值报警值为25
}
}
/*********************************************************/
// 主函数
/*********************************************************/
void main()
{
uchar i; // 循环变量
uint dist; // 保存测量结果
LcdInit(); // 液晶功能初始化
LcdShowInit(); // 液晶显示内容初始化
AlarmInit(); // 报警值初始化
TMOD = 0x01; // 选择定时器0,并且确定是工作方式1(为了超声波模块测量距离计时用的)
Trig4_P=0;
while(1)
{
/*传感器4*/
dist=GetDistance4(); // 读取超声波模块4测量到的距离
LcdGotoXY(0,2); // 光标定位
LcdPrintNum(dist); // 显示传感器4测量到的距离
AlarmJudge4(dist); // 判断传感器4的测量距离是否需要报警
/*延时并扫描按键*/
for(i=0;i<15;i++)
{
KeyScanf();
DelayMs(10);
}
}
}到了这里,关于基于c51单片机超声波测距仪的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!