**单片机设计介绍,基于单片机智能循迹小车仿真设计
一 概要
基于单片机的智能循迹小车是一种通过传感器检测地面情况,并根据设定的规则进行动作控制的机器人。它使用单片机作为主控制器,通过连接放置在车身底部的红外传感器和电机等组件来实现循迹和运动控制。
二、功能设计
下面是一个基于单片机智能循迹小车的仿真设计介绍的基本步骤:
-
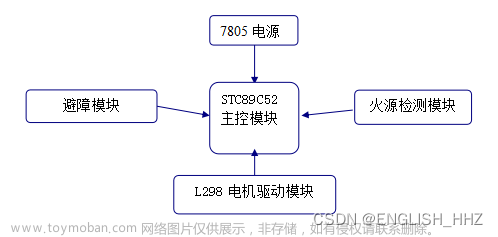
硬件设计:
- 确定需要的电机和轮子数量,并进行相应的电路设计和连接。
- 选择合适的红外传感器,并根据需要进行电路连接。
- 将单片机(如Arduino)作为主控制器,并连接到其他组件。
-
软件设计:
- 编写程序来读取红外传感器的数据,并根据数据的变化来判断位置(黑线或白线)。
- 设计算法来确定小车应该向前、向后、向左还是向右移动,以保持在黑线上。
- 实现相应的控制逻辑,将算法转化为运动指令发送给电机。
-
仿真设计:
- 使用仿真软件(如Proteus、MPLAB X等)创建一个虚拟环境,模拟小车和传感器的物理特性。
- 在虚拟环境中设置地面为黑白相间的线条,模拟实际循迹情景。
- 将硬件设计和软件设计的综合模型导入仿真软件中,进行仿真测试。
-
仿真测试:
- 在仿真环境中运行测试案例,观察小车的运动和循迹效果。
- 根据仿真结果,调整控制算法和参数,优化小车的行为。
通过以上步骤,您可以在仿真环境中设计和测试一个基于单片机的智能循迹小车的行为。请注意,仿真结果可能会略有差异,具体的效果取决于所使用的软件和硬件。
设计思路
设计思路
文献研究法:搜集整理相关单片机系统相关研究资料,认真阅读文献,为研究做准备;
调查研究法:通过调查、分析、具体试用等方法,发现单片机系统的现状、存在问题和解决办法;
比较分析法:比较不同系统的具体原理,以及同一类传感器性能的区别,分析系统的研究现状与发展前景;
软硬件设计法:通过软硬件设计实现具体硬件实物,最后测试各项功能是否满足要求。
三、 软件设计
本系统原理图设计采用Altium Designer19,具体如图。在本科单片机设计中,设计电路使用的软件一般是Altium Designer或proteus,由于Altium Designer功能强大,可以设计硬件电路的原理图、PCB图,且界面简单,易操作,上手快。Altium Designer19是一款专业的整的端到端电子印刷电路板设计环境,用于电子印刷电路板设计。它结合了原理图设计、PCB设计、多种管理及仿真技术,能够很好的满足本次设计需求。
————————————————
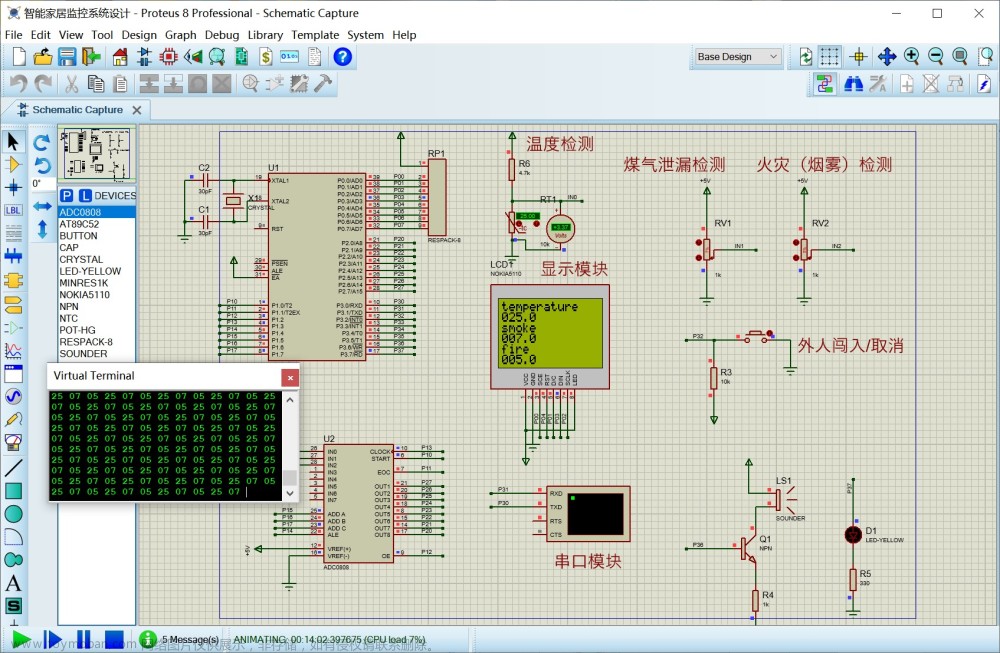
仿真实现
本设计利用protues8.7软件实现仿真设计,具体如图。
Protues也是在单片机仿真设计中常用的设计软件之一,通过设计出硬件电路图,及写入驱动程序,就能在不实现硬件的情况进行电路调试。另外,protues还能实现PCB的设计,在仿真中也可以与KEIL实现联调,便于程序的调试,且支持多种平台,使用简单便捷。
————————————————
原理图



五、 程序
本设计利用KEIL5软件实现程序设计,具体如图。作为本科期间学习的第一门编程语言,C语言是我们最熟悉的编程语言之一。当然,由于其功能强大,C语言是当前世界上使用最广泛、最受欢迎的编程语言。在单片机设计中,C语言已经逐步完全取代汇编语言,因为相比于汇编语言,C语言编译与运行、调试十分方便,且可移植性高,可读性好,便于烧录与写入硬件系统,因此C语言被广泛应用在单片机设计中。keil软件由于其兼容单片机的设计,能够实现快速调试,并生成烧录文件,被广泛应用于C语言的编写和单片机的设计。
————————————————

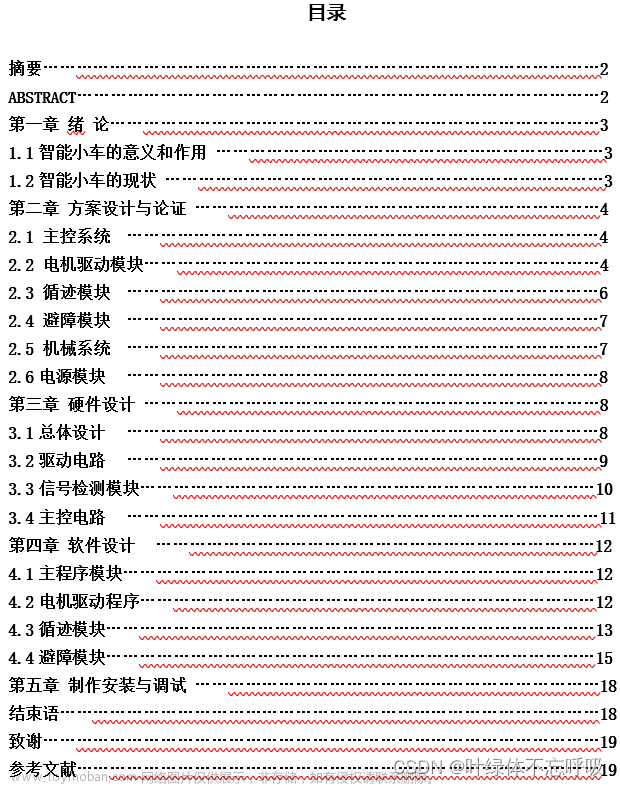
六、 文章目录
目 录文章来源:https://www.toymoban.com/news/detail-759425.html
摘 要 I
Abstract II
引 言 1
1 控制系统设计 2
1.1 主控系统方案设计 2
1.2 传感器方案设计 3
1.3 系统工作原理 5
2 硬件设计 6
2.1 主电路 6
2.1.1 单片机的选择 6
2.2 驱动电路 8
2.2.1 比较器的介绍 8
2.3放大电路 8
2.4最小系统 11
3 软件设计 13
3.1编程语言的选择 13
4 系统调试 16
4.1 系统硬件调试 16
4.2 系统软件调试 16
结 论 17
参考文献 18
附录1 总体原理图设计 20
附录2 源程序清单 21
致 谢 25文章来源地址https://www.toymoban.com/news/detail-759425.html
到了这里,关于基于单片机智能循迹小车仿真设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!