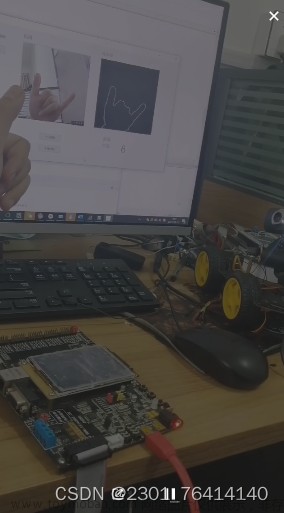
涉及技术栈:opencv + cnn + PIL

网络训练算法流程(training.py)
- 图像读取及预处理
本实验采用PLL库里的open函数完成图片的读取工作,用resize函数将图像的尺寸变为统一值。为减少卷积操作的计算量,将图像做归一化处理,将图像的像素值变为[0,1]之间。

2,编码标签
将训练集和测试集的标签转为独热码。

3.构建卷积神经网络

4.配置和训练网络
搭建完网络后,设置损失函数,优化器和评价指标。配置网络训练参数,包括训练集和测试集,训练轮数等参数,接着开始训练网络。调整网络训练参数,使网络收敛达到比较好的效果。

打印出的模型的具体结构:

训练损失图:


5.评价模型
混淆矩阵是表示精度评价的一种标准格式,用n行n列的矩阵形式来表示。混淆矩阵的每一列代表了预测类别,每一列的总数表示预测为该类别的数据的数目;每一行代表了数据的真实归属类别,每一行的数据总数表示该类别的数据实例的数目。混淆矩阵对角线上的数值越大,说明预测为真的数目越多,分类效果越好。

模型测试(predict.py)测试图片
from tensorflow.keras.models import load_model
# import matplotlib.image as processimage
# import matplotlib as plt
import numpy as np
from PIL import Image
import os
model = load_model('Gesture_2.h5')
Gesturetype = ['666', 'yech', 'stop', 'punch', 'OK']
# Gesturetype = ['666', 'stop', 'yech', 'ok', 'one']
path = 'test\\'
file_count = 0
for file in os.listdir(path):
list = []
img = Image.open(path + file)
test = file.split('_')[0]
table = file.split('_')[1][0]
img = np.array(img).reshape(-1, 100, 100, 1) / 255
prediction = model.predict(img)
print(prediction)
final_prediction = [result.argmax() for result in prediction][0]
print(final_prediction)
ges_type = Gesturetype[final_prediction]
print(ges_type)
模型测试(录制视频.py)测试视频
import cv2
import numpy as np
from tensorflow.keras.models import load_model
from training import Training
import os
from tensorflow.keras import backend
import time
import random
class Gesture():
def __init__(self, train_path, predict_path, gesture, train_model):
self.blurValue = 5
self.bgSubThreshold = 36
self.train_path = train_path
self.predict_path = predict_path
self.threshold = 60
self.gesture = gesture
self.train_model = train_model
self.skinkernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))
self.x1 = 380
self.y1 = 60
self.x2 = 640
self.y2 = 350
def collect_gesture(self, capture, ges, photo_num):
photo_num = photo_num
vedeo = False
predict = False
count = 0
# 读取默认摄像头
cap = cv2.VideoCapture(capture)
# 设置捕捉模式
cap.set(10, 200)
# 背景减法创建及初始化
bgModel = cv2.createBackgroundSubtractorMOG2(0, self.bgSubThreshold)
while True:
# 读取视频帧
ret, frame = cap.read()
# 镜像转换
frame = cv2.flip(frame, 1)
# cv2.imshow('Original', frame)
# 双边滤波
frame = cv2.bilateralFilter(frame, 5, 50,100)
# 绘制矩形,第一个为左上角坐标(x,y),第二个为右下角坐标
# rec = cv2.rectangle(frame, (220, 50), (450, 300), (255, 0, 0), 2)
rec = cv2.rectangle(frame, (self.x1, self.y1), (self.x2, self.y2), (255, 0, 0), 2)
# 定义roi区域,第一个为y的取值,第2个为x的取值
# frame = frame[50:300, 220:450]
frame = frame[self.y1:self.y2, self.x1:self.x2]
# cv2.imshow('bilateralFilter', frame)
# 背景减法运动检测
bg = bgModel.apply(frame, learningRate=0)
# 显示背景减法的窗口
# cv2.imshow('bg', bg)
# 图像边缘处理--腐蚀
fgmask = cv2.erode(bg, self.skinkernel, iterations=1)
# 显示边缘处理后的图像
# cv2.imshow('erode', fgmask)
# 将原始图像与背景减法+腐蚀处理后的蒙版做"与"操作
bitwise_and = cv2.bitwise_and(frame, frame, mask=fgmask)
# 显示与操作后的图像
# cv2.imshow('bitwise_and', bitwise_and)
# 灰度处理
gray = cv2.cvtColor(bitwise_and, cv2.COLOR_BGR2GRAY)
# 高斯滤波
blur = cv2.GaussianBlur(gray, (self.blurValue, self.blurValue), 2)
# cv2.imshow('GaussianBlur', blur)
【计算机毕设之基于CNN+opencv的手势识别系统】 https://www.bilibili.com/video/BV1nB4y1U7m8/?share_source=copy_web&vd_source=3d18b0a7b9486f50fe7f4dea4c24e2a4
http://www.bilibili.com/video/BV1nB4y1U7m8/?share_source=copy_web&vd_source=3d18b0a7b9486f50fe7f4dea4c24e2a4文章来源:https://www.toymoban.com/news/detail-760934.html
文章来源地址https://www.toymoban.com/news/detail-760934.html
到了这里,关于基于opencv + cnn + PIL的手势识别系统的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!