2022年秋季《数字图像处理》课程复习整理
课程大纲

一、视觉与图像
1. 图像格式
PBM(bitmap) PGM(graymap)PPM(pixelmap)
TIFF(无损图像格式)、bmp、jepg、gif、png等
2. 图像获取
像素位深度:
如果8位三通道彩色图像,则变换范围就是
2
8
∗
2
8
∗
2
8
−
1
2^8*2^8*2^8-1
28∗28∗28−1

3. 采样与量化
简单成像模型:

采样:空间坐标离散化
量化:采样点的灰度值离散化
空间采样由物理像素决定,灰度采样由模拟-数字决定。
4. 像素间的基本关系
二维平面:4邻域、8邻域
三维空间:27邻域(对应8邻域)
5. 像素集基本运算

线性算子:满足齐次性、可加性(回忆矩阵课中)
6. 彩色图像
CMYK比RGB更适合打印
Hue:色调,Saturation:饱和度,Intensity:强度,Lightness:亮度,Value:亮度
二、图像变换与滤波
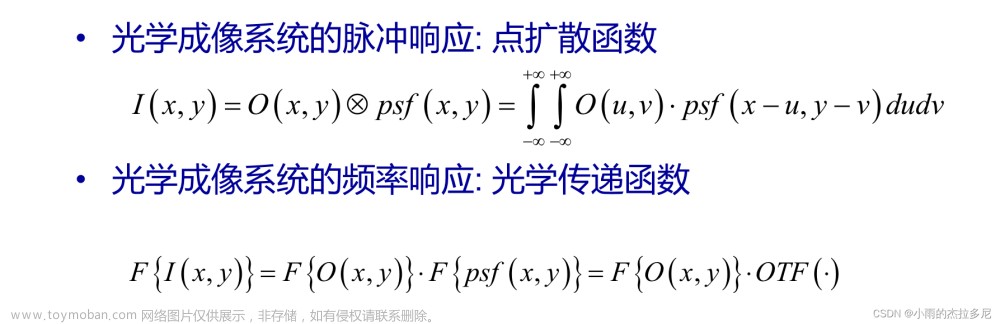
1. 点扩散函数
psf函数(point spread function)
OTF函数(optical transfer function)就是psf的傅立叶变换,在频域的函数。
一个复杂图像的像I(x,y)可以看作是真实对象O(x,y)和psf函数的卷积。
在频域的乘积就是空间域的卷积
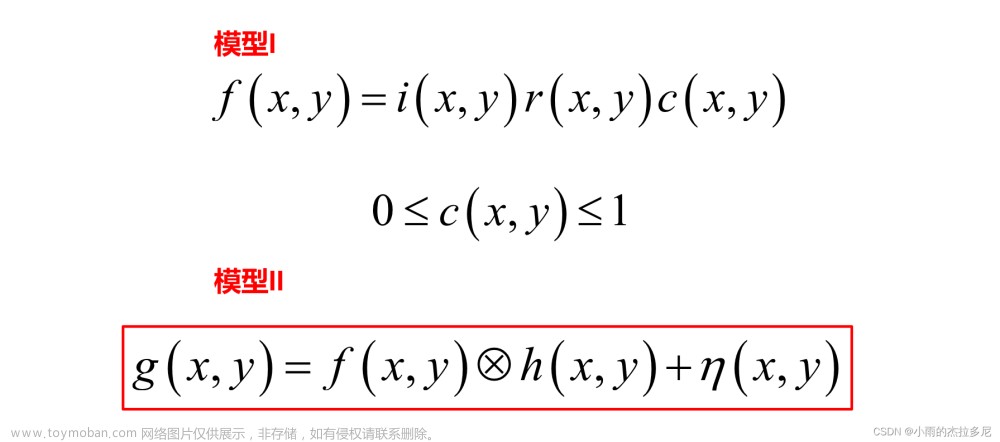
其中h(x, y)是degradation退化过程, yeta(x,y)是噪声。一个图像g就是这么构成的。
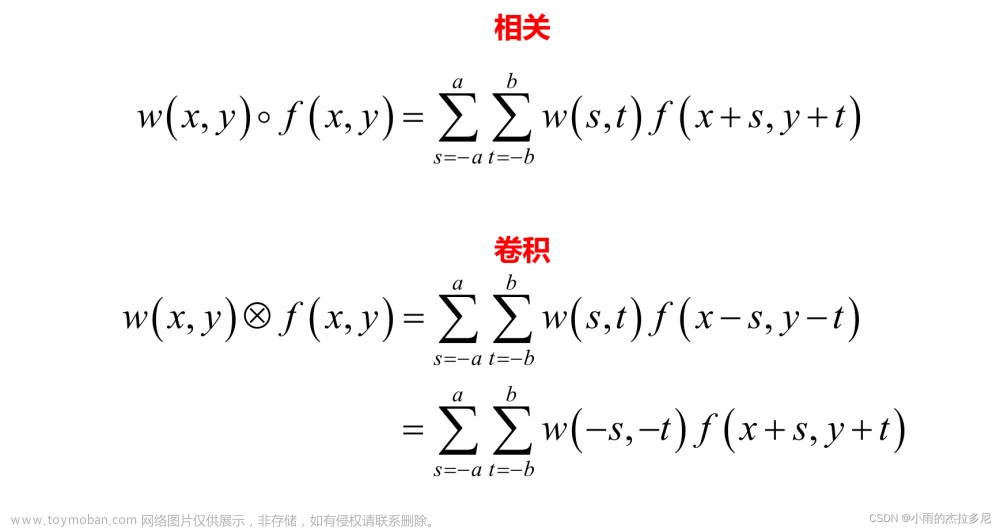
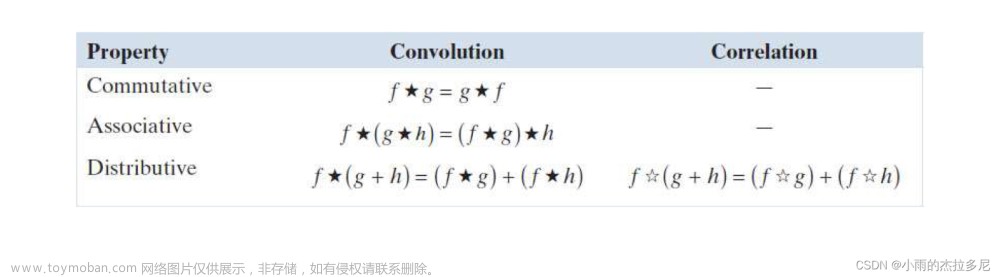
2. 空间滤波
卷积要翻转滤波核,并且相关不具有交换律和结合律
图像导数的计算:
前向差分、后项差分、中心差分
f
′
(
x
)
=
f
(
x
+
h
)
−
f
(
x
−
h
)
2
h
+
O
(
h
2
)
f'(x) = \frac{f(x+h)-f(x-h)}{2h}+O(h^2)
f′(x)=2hf(x+h)−f(x−h)+O(h2)
图像求导会放大噪声:
设定前一项为图像,后一项为噪声
那么分量AS>AN,但频率WS<WN
A
S
s
i
n
(
W
s
t
)
+
A
N
s
i
n
(
W
N
t
)
A_Ssin(W_st)+A_Nsin(W_Nt)
ASsin(Wst)+ANsin(WNt)
这样每次求导,前一项都会求出来一个WS,后一项都会求出来一个WN
长远来看,噪声的比例会被方大,因为WS<WN
2.1 高斯滤波器
对于均值滤波器,在频域内是非单调的,这种特性是我们不希望看到的。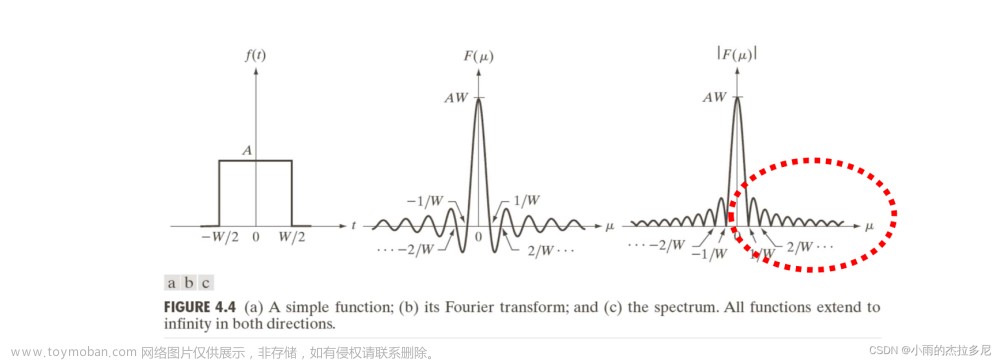
因此,考虑高斯滤波器,拥有低通和可分式两个特性。如果方差越大,则会损失越多的高频信息。
高斯滤波器的窗口大小 = ceiling(3 * sigma) * 2 + 1
原因(3sigma原则)在3sigma范围内就已经包含足够的信息了。
两边两个3sigma再加中间的元素。
2.2 高通滤波器
- 梯度锐化(比如梯度超过一定值用梯度替代,其他保持原像素)
- Laplacian增强算子(就是加大原先laplacian的中心系数)
3. 一维傅立叶变换 & 采样定理
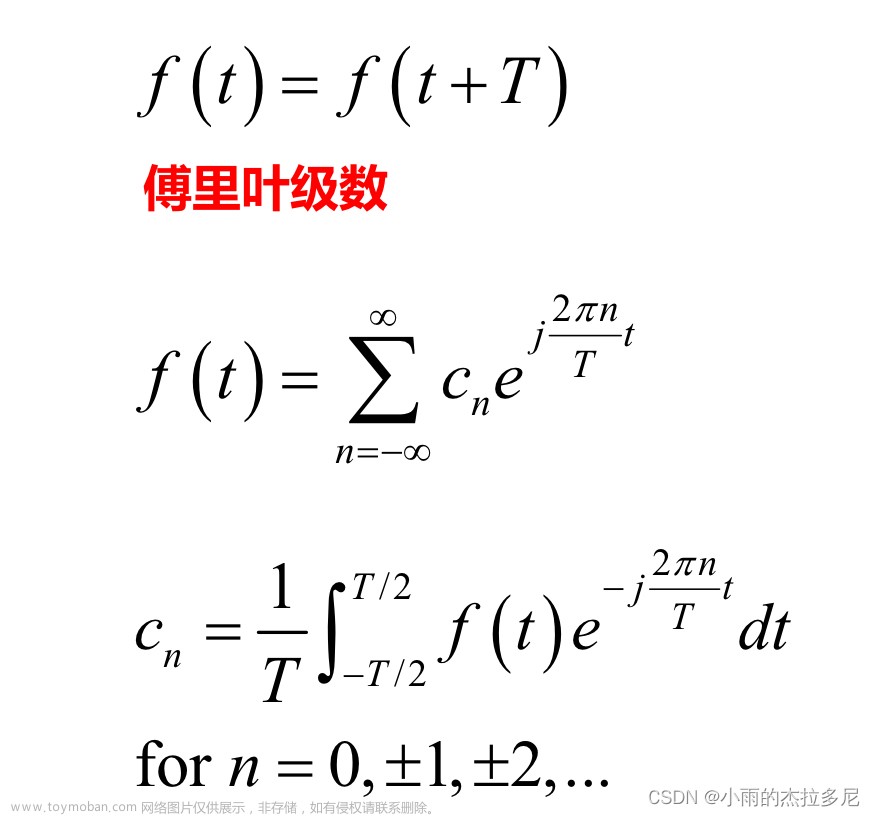
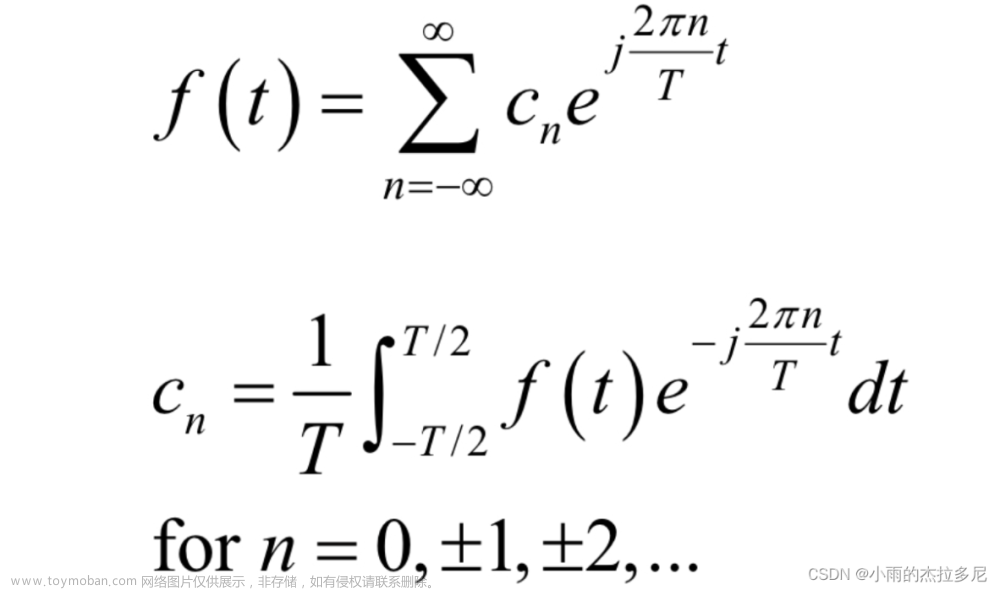
傅立叶级数:其中e的j theta次方是欧拉公式
其中n代表要展开为n项,T是f(t)的周期
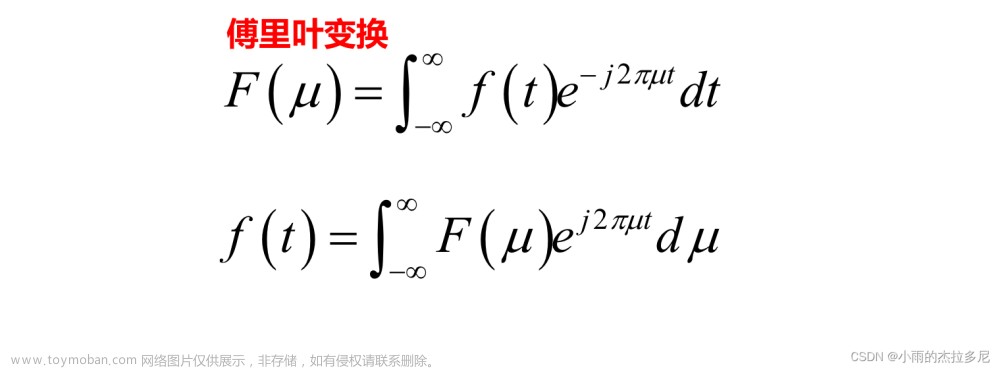
傅立叶变换:
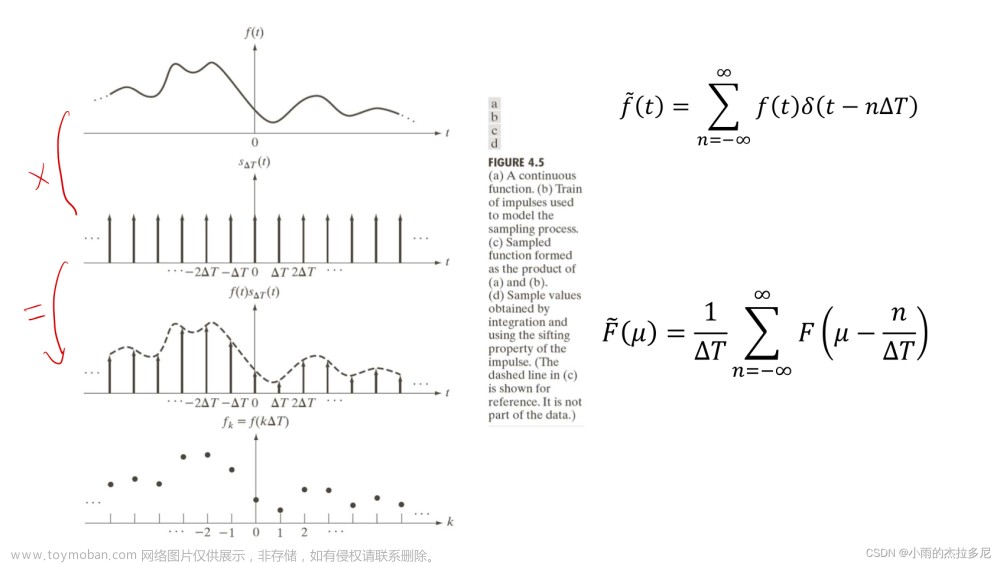
采样
采样的过程被看作是原函数与脉冲函数的乘积。
经过推导采样后的傅立叶变换是原函数傅立叶变换的无限、周期副本序列,间隔为deltaT。
采样定理:
而1/deltaT是采样频率,采样频率要高于最大频率的两倍(即三角形的底边),才能防止产生混叠现象。才能成功恢复原始信号。这样的频率叫做奈奎斯特率

利用奈奎斯特率采样率恢复原始信号:
直接用H(u)乘采样后信号就可以得到一个周期的原始信号。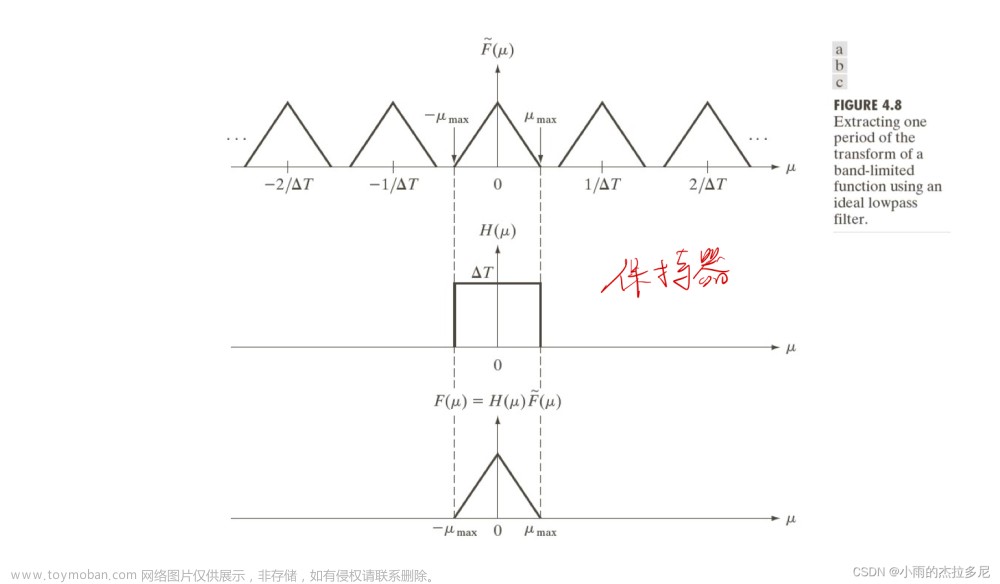
有限持续时间函数不可能是带限的(回忆测不准原理)
带限的是说在频域上无高频。
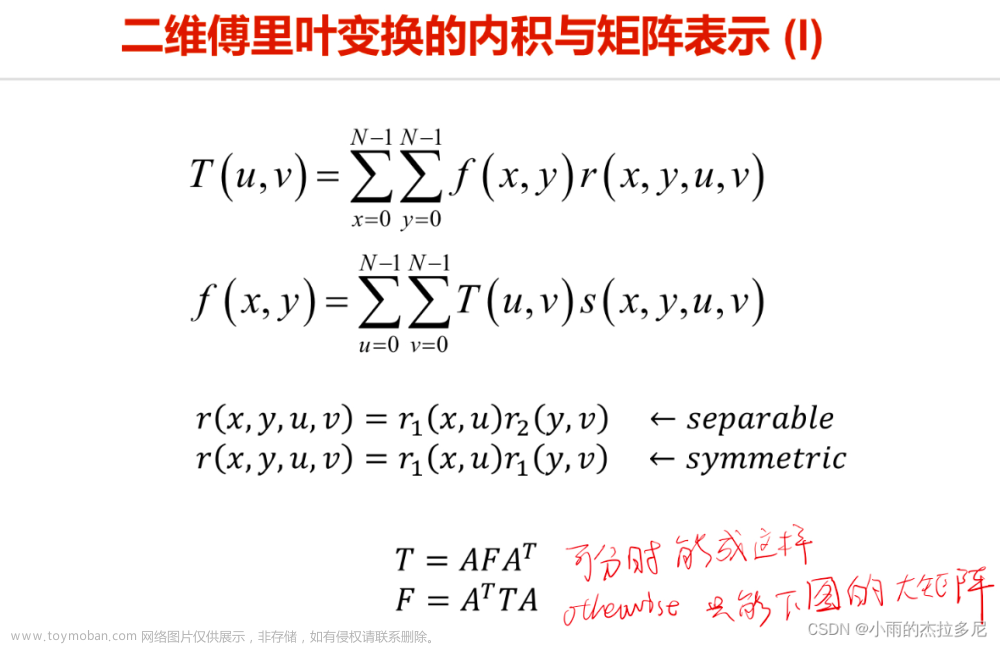
4. 二维傅立叶变换 & 采样定理
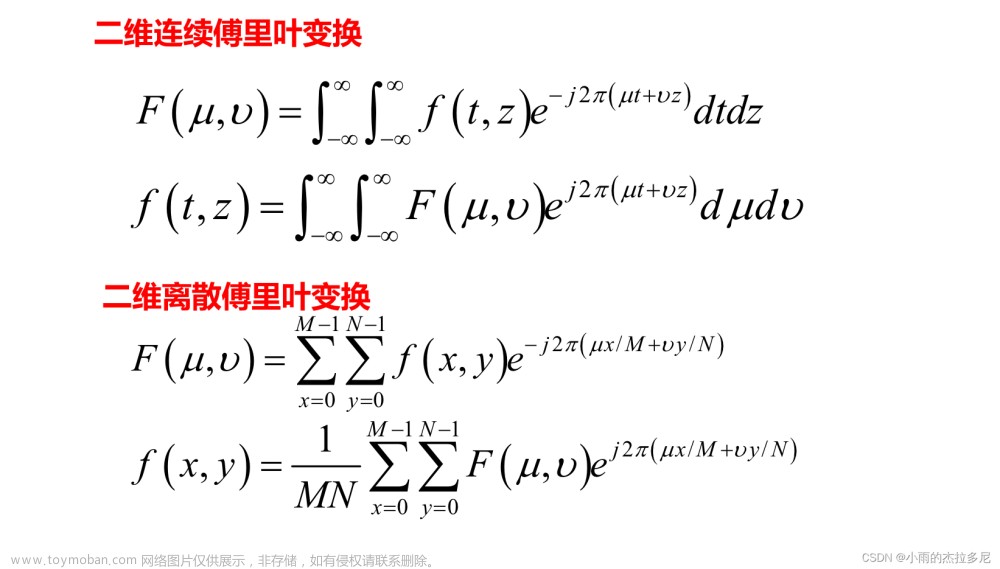
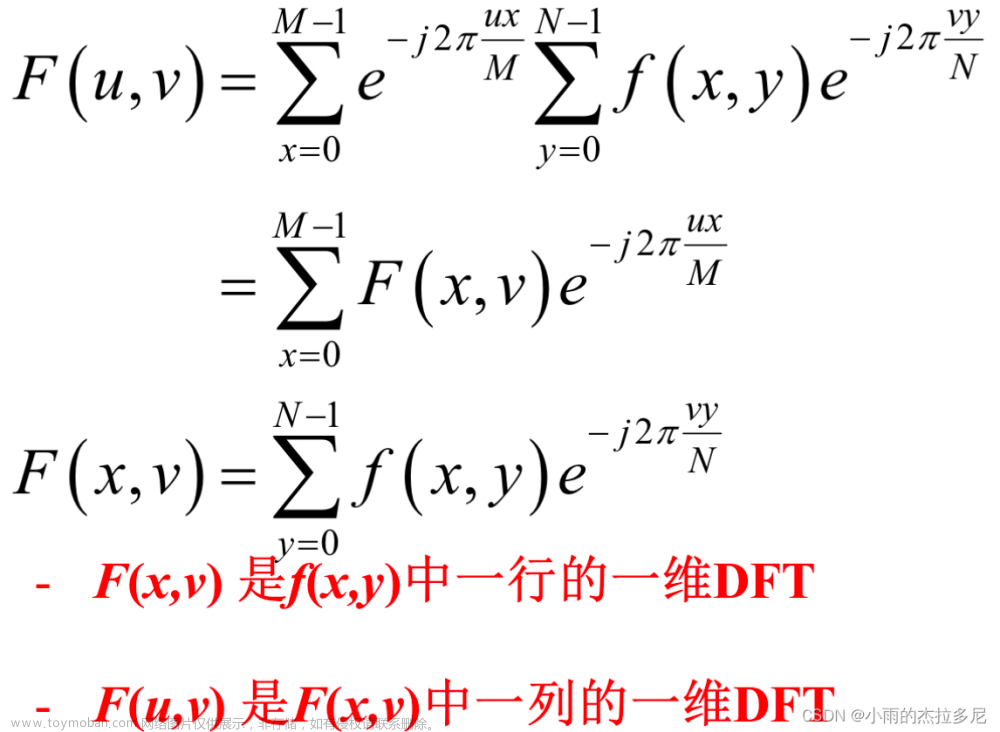
二维傅立叶变换具有可分性:(要会推导)
可以先对行做傅立叶变换,再对列做
逆向傅立叶变换步骤:
- 取共轭
- 做二维离散傅立叶变换
- 除MN,取共轭
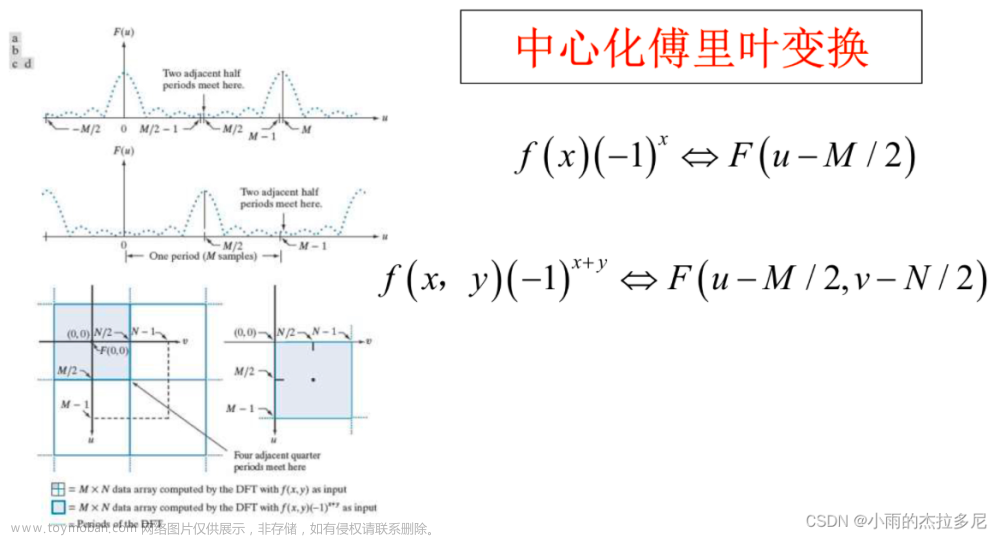
要让周期移动到M/2的位置,让其中心出现在高频区域
f
(
x
)
e
j
2
π
(
μ
0
x
/
M
)
=
F
(
μ
−
μ
0
)
f(x)e^{j2\pi(\mu_0x/M)} = F(\mu - \mu_0)
f(x)ej2π(μ0x/M)=F(μ−μ0)
取mu_0是M/2,指数项就是(-1)^x
二维F的采样定理就是要在两个方向都大于奈奎斯特率,否则也会出现混叠现象。

二维傅立叶变换的特性:
对称性、平移不变性、二维卷积定理等。。
FFT: 只需要知道计算复杂度即可,MlogM
5. 图像频率域滤波
步骤:
- 给定图像 f 进行傅立叶变换F
- 构建频率域滤波器H,乘F。得到结果G
- G逆变换回空间域
5.1 低通
理想低通滤波器,在空间域直接截断,在频域会产生振铃现象
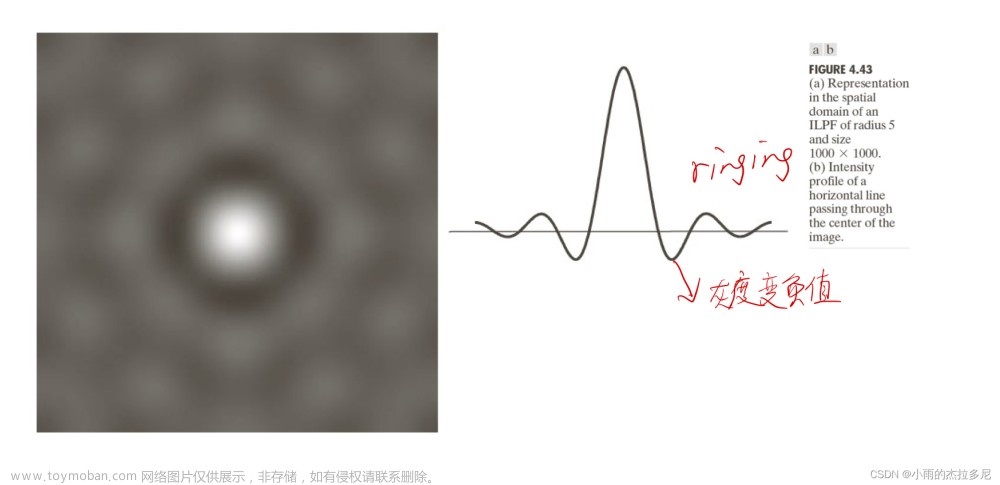
高斯低通滤波器虽然解决了ringing,但坡度过于平滑,模糊效果强烈。
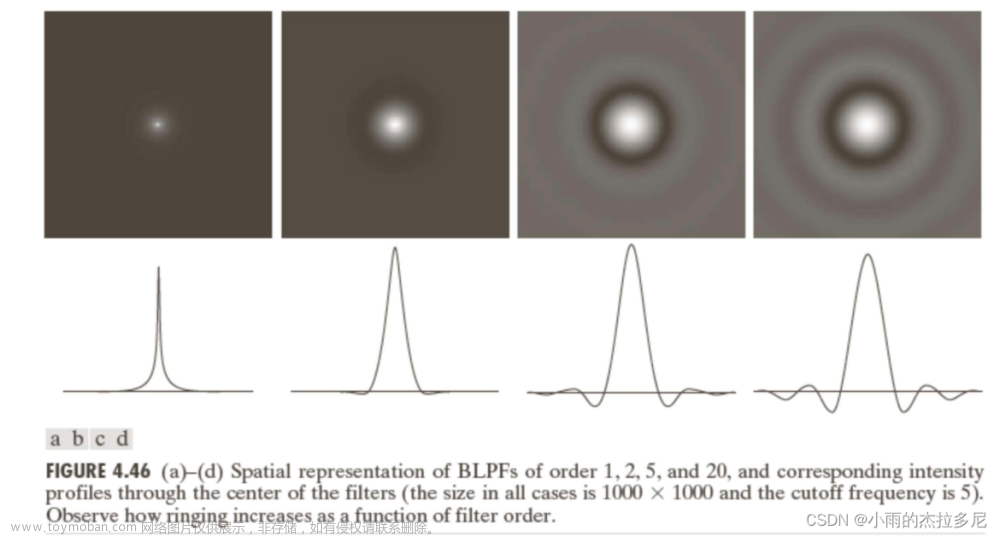
巴特沃斯滤波器:
当n较大时,逼近于理想低通;当n较小时,逼近于高斯低通

相对的,在空域上BLPF就也会有ringing,低阶不明显。
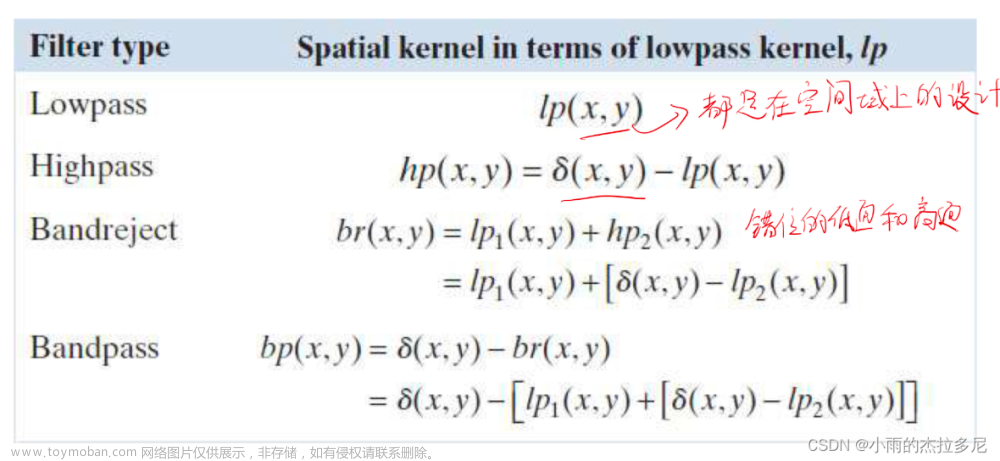
5.2 其他滤波器
选择性滤波器:带阻、带通(都有理想、高斯和巴特沃斯情况)

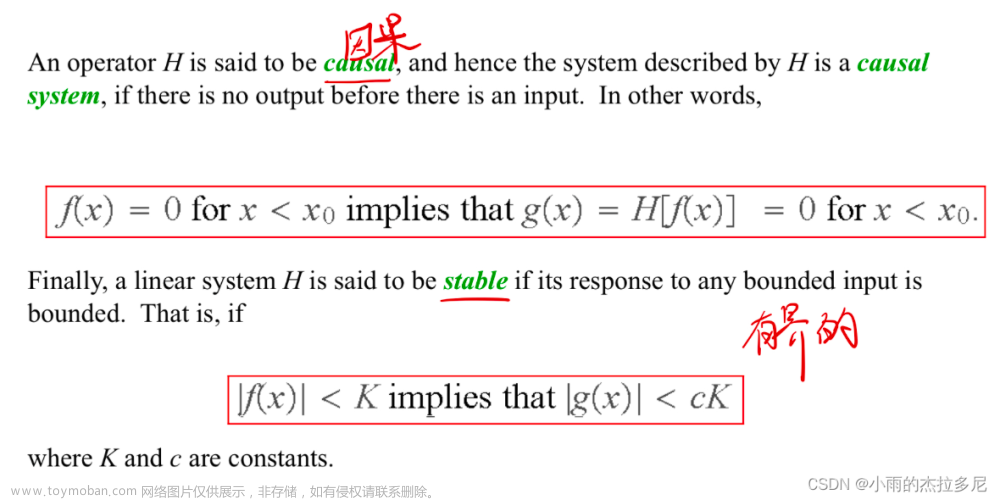
6. 线性系统补充
线性算子:满足可加性和齐次性的operator
特性1: fixed parameter(g(x+x_0) = H[f(x+x_0)])
特性2: causal
特性3: stable (有界)
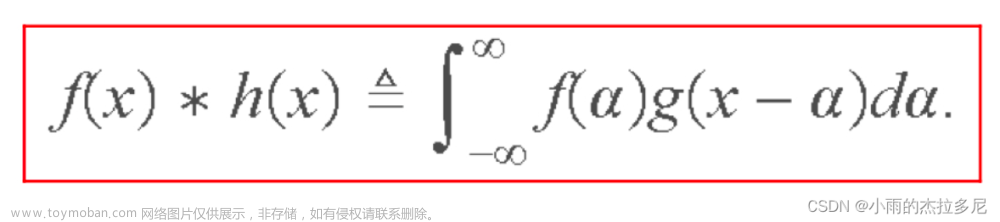
利用卷积公式和傅立叶变换,就可以推导空域卷积等于频域乘积了。
7. 图像滤波算子
Laplacian算子:就是求导数用的(1,-2,1)的纵横(斜角)的叠加

Roberts 只有2*2,检测斜方向梯度
Sobel、Prewitt、Scharr都是可以用来求边缘的
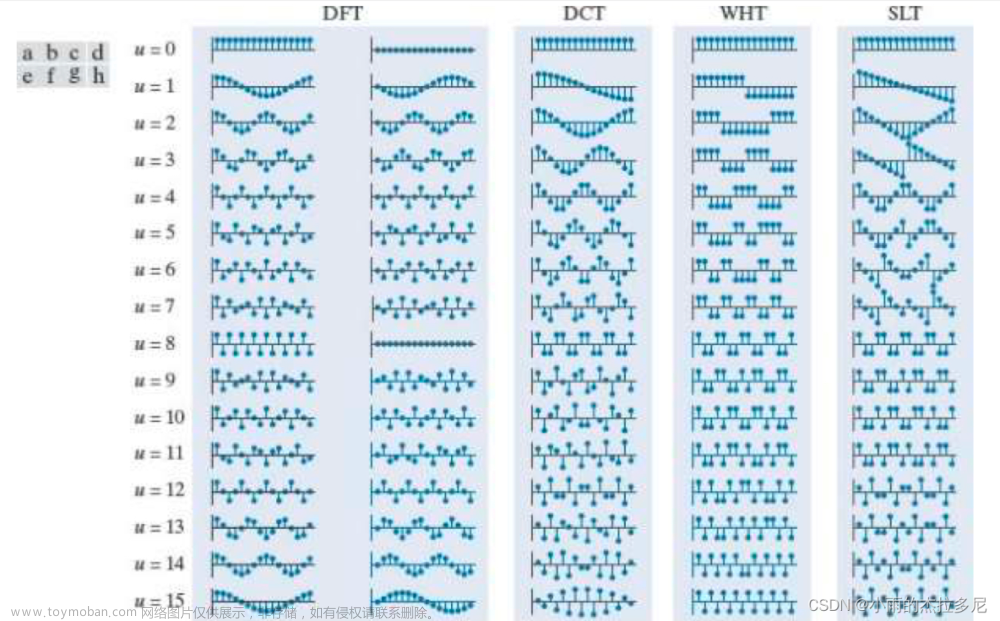
8. 正交变换
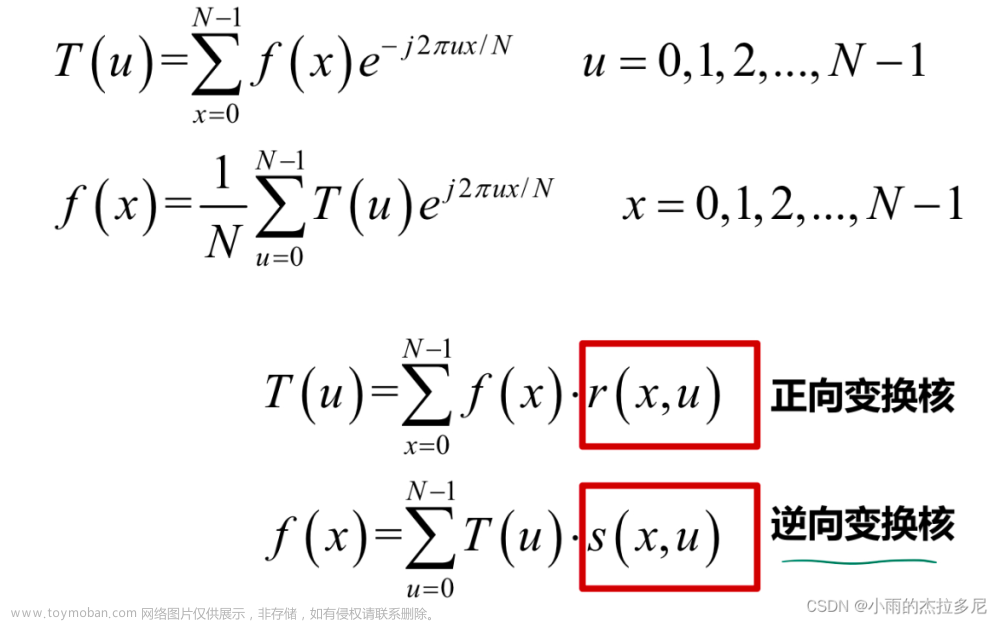
一维、二维傅立叶变换是一种正交变换
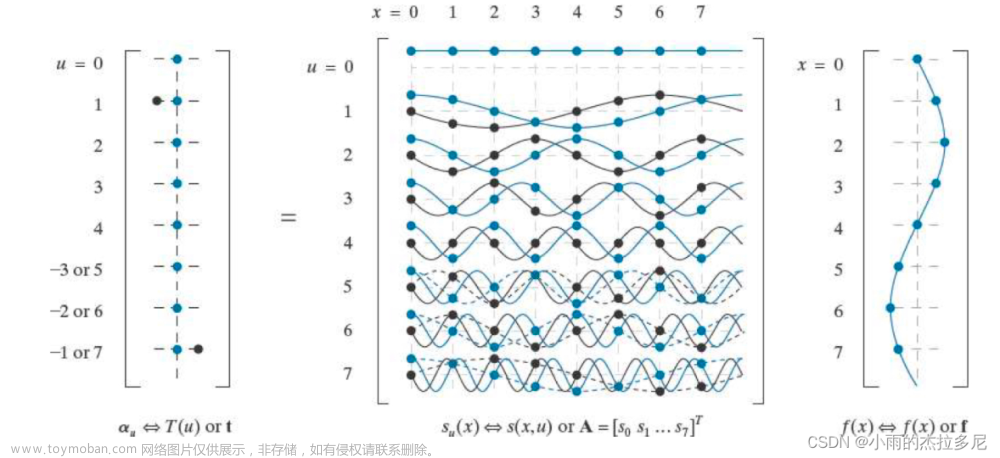
8.1 一维傅立叶变换
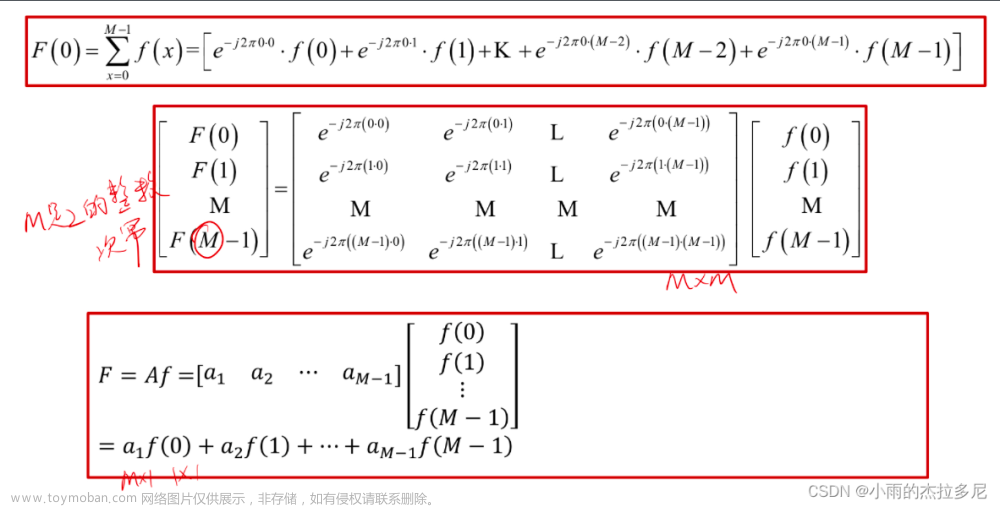
A矩阵的每一行都是一个变换核:

这里说明,A的第一列是r0,因为A是正交矩阵,第一行是s0。
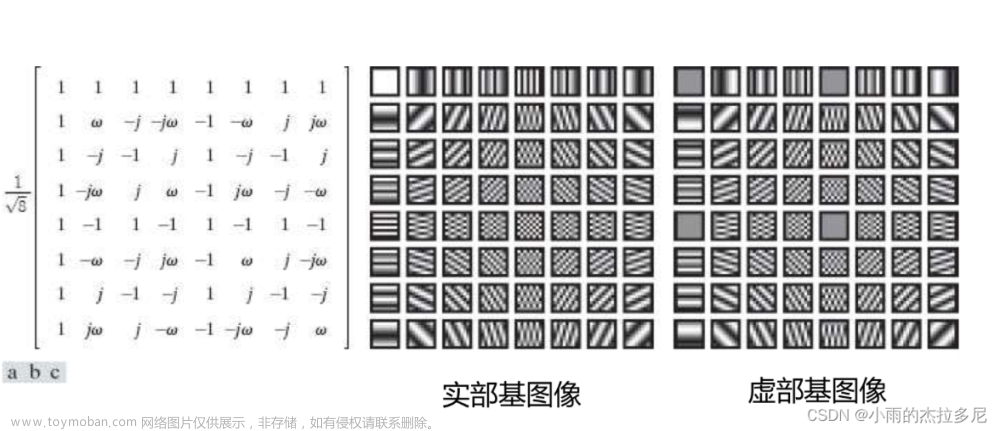
8.2 二维傅立叶变换
基图像:
其他的:
-
Hartley变换(与傅立叶变换相似,替换掉了复指数函数)
-
离散余弦、离散正弦变换
-
Walsh-Hadamard变换,Slant变换,Haar变换

9. 距离变换
就是得到每个像素距离边界的最短距离。
欧氏距离、街区距离、棋盘距离
Hausdorff距离:两个边界,到彼此最小距离的最大值,然后再取max
距离变换局限性:对noise很敏感(可用形态学先去除噪声)
三、图像的统计描述
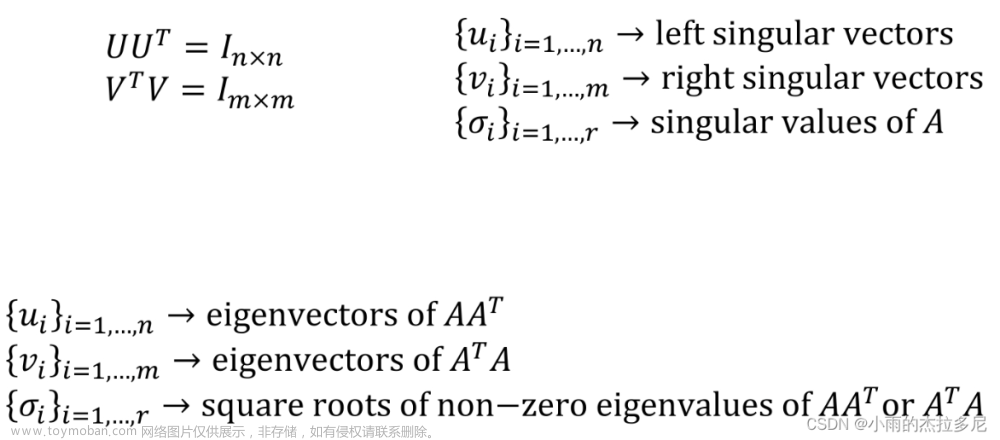
3.1 特征值、奇异值分解
奇异值分解:与特征值分解不同,是对于
A
T
A
A^TA
ATA
的特征值所作出的分解。
可以看作多个low-rank矩阵的加权和,权重就是对应的奇异值。
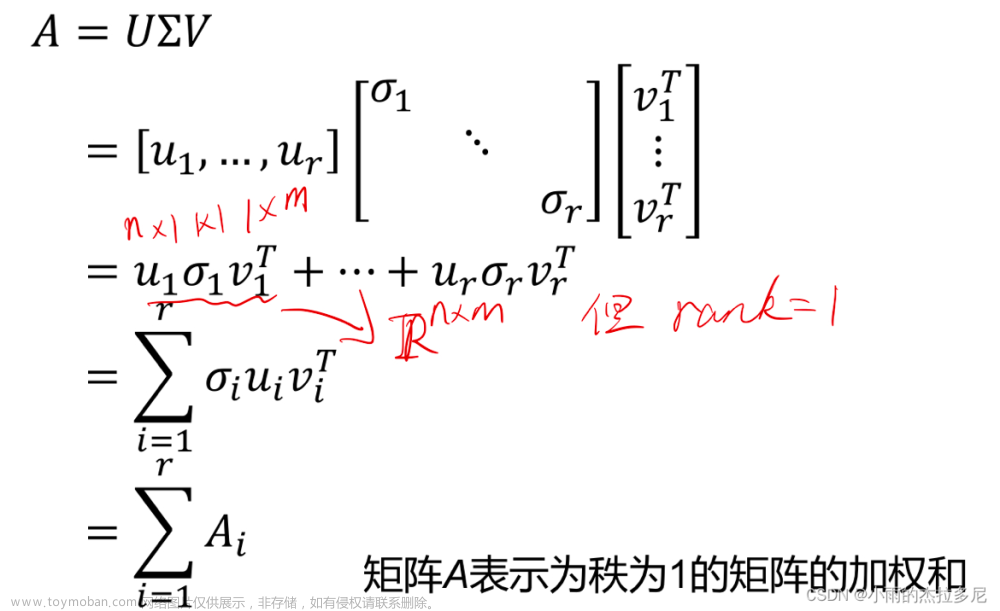
应用:最优逼近、图像压缩、denoising
3.2 图像的空间、统计描述
1.空间描述:邻域等
区域R的边界是指其R与R补集相邻的点集合。
2.统计描述:
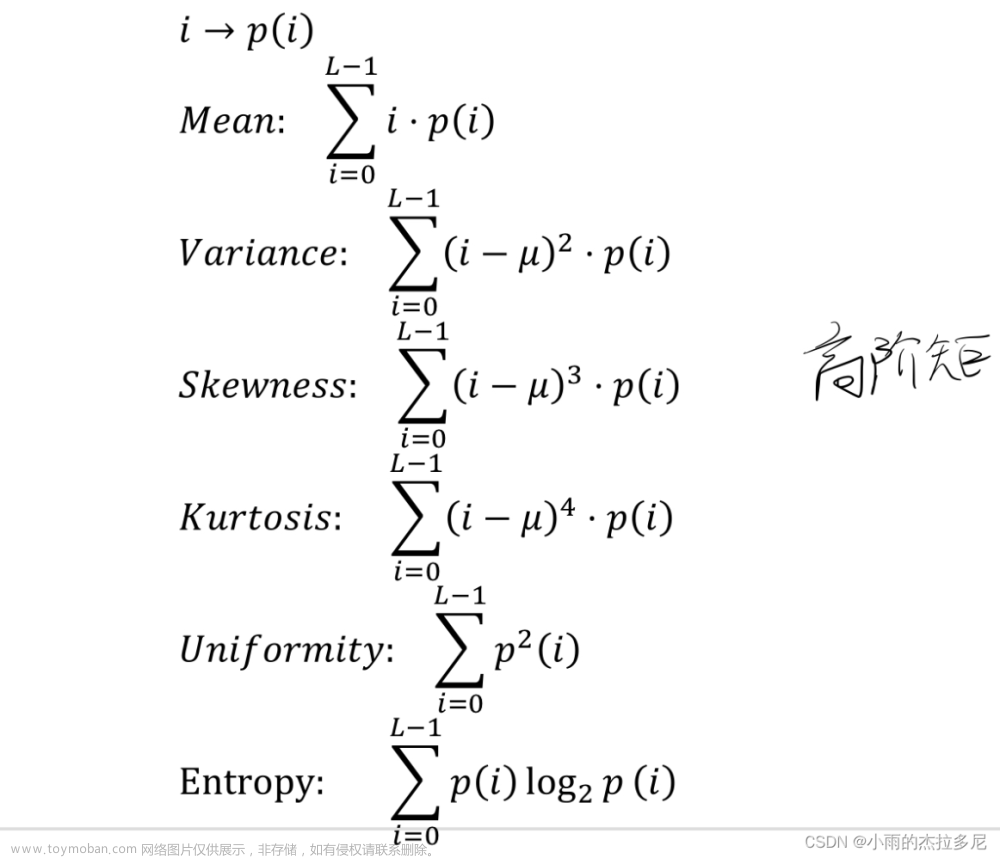
co-occurrence matrix:记录了出现图像变化的固定特征。
3.3 随机过程
概念:
马尔可夫链:
只和上一阶段的状态有关,与再之前的状态无关。
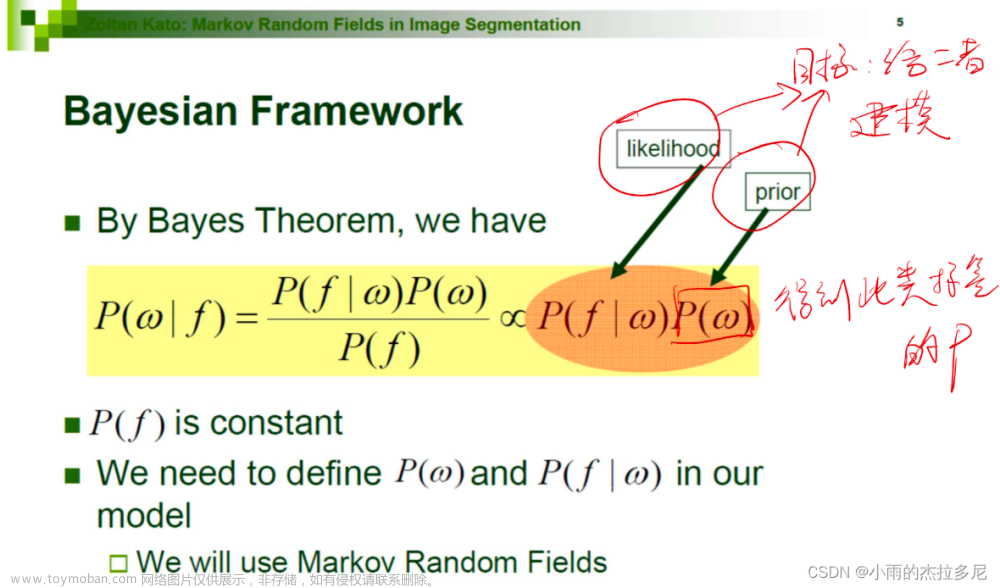
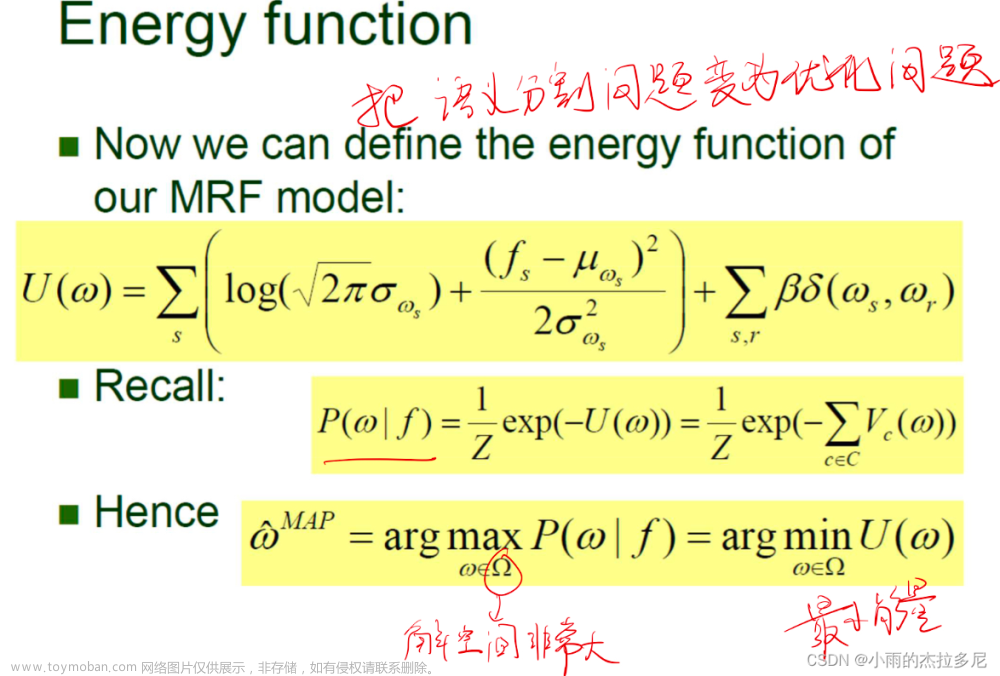
3.4 随机场
通过场来描述像素间关系。
MAP,后验就是已经有了当前像素的特征向量f,去估计其标签w。
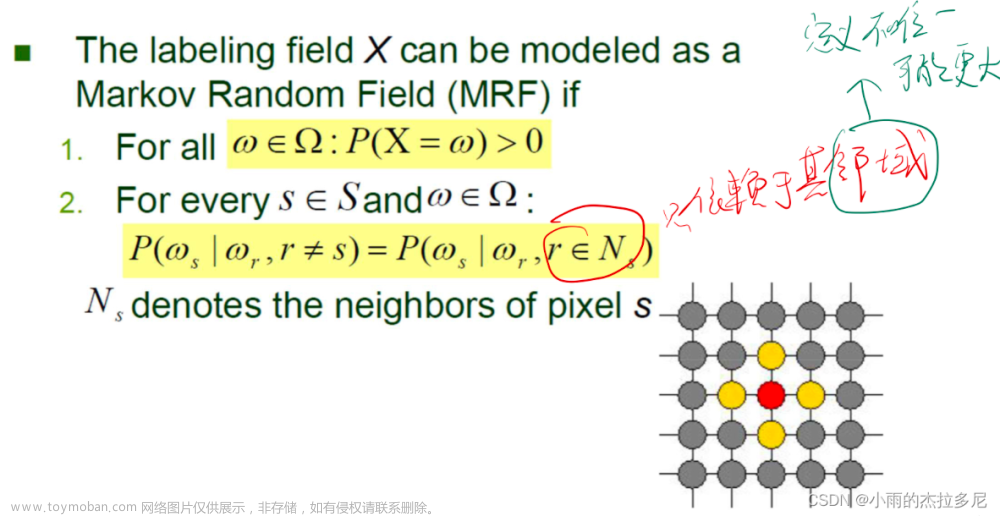
MRF:概念
当前像素的类别只依赖于其邻域
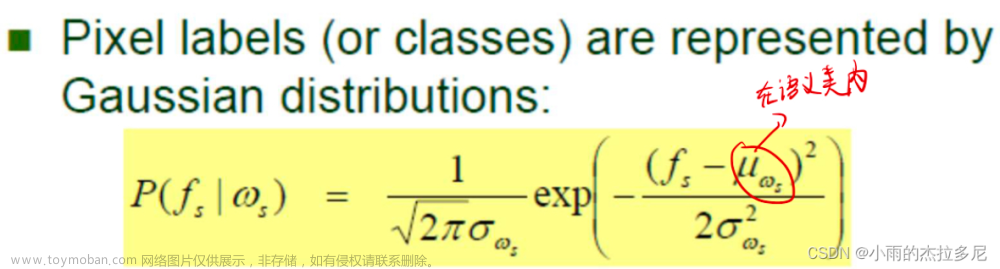
其中,likelihood假设服从高斯分布。
关于先验p(w),利用团势能来构建
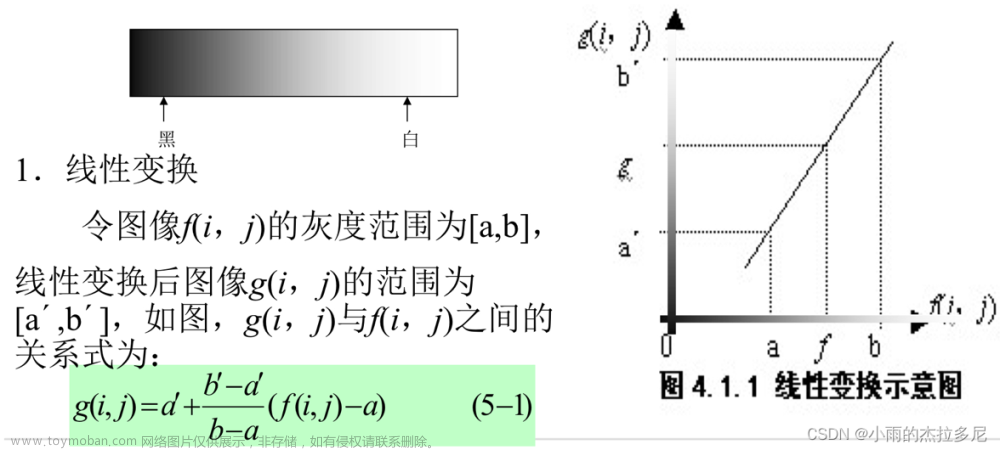
四、图像增强
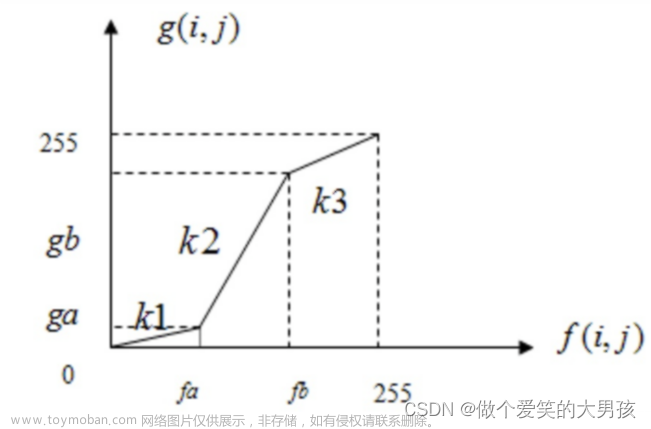
1. 线性灰度变换
就是成比例,对应即可
2. 非线性灰度变换
对数变换
g
(
i
,
j
)
=
a
+
l
n
[
f
(
i
.
j
)
+
1
]
b
⋅
l
n
c
g(i,j)=a+\frac{ln[f(i.j)+1]}{b·lnc}
g(i,j)=a+b⋅lncln[f(i.j)+1]
指数变换
g
(
i
,
j
)
=
b
c
[
f
(
i
,
j
)
−
a
]
−
1
g(i,j)=b^{c[f(i,j)-a]}-1
g(i,j)=bc[f(i,j)−a]−1
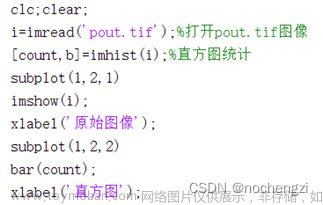
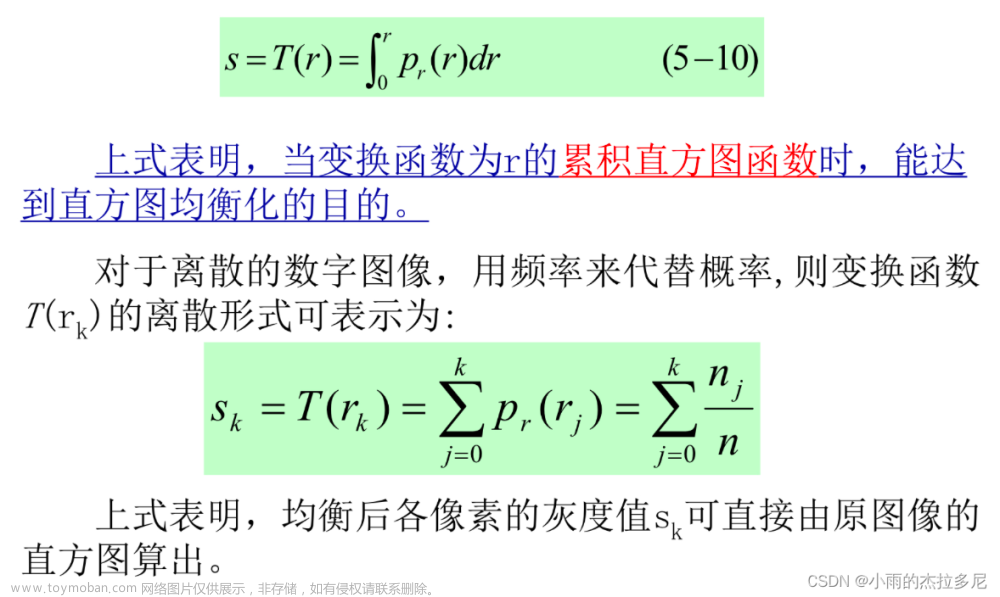
3. 直方图
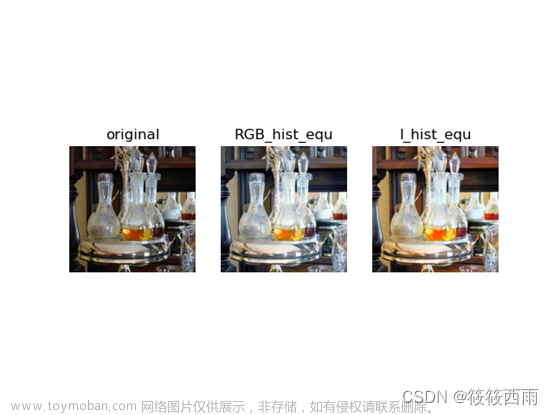
3.1 直方图均衡化
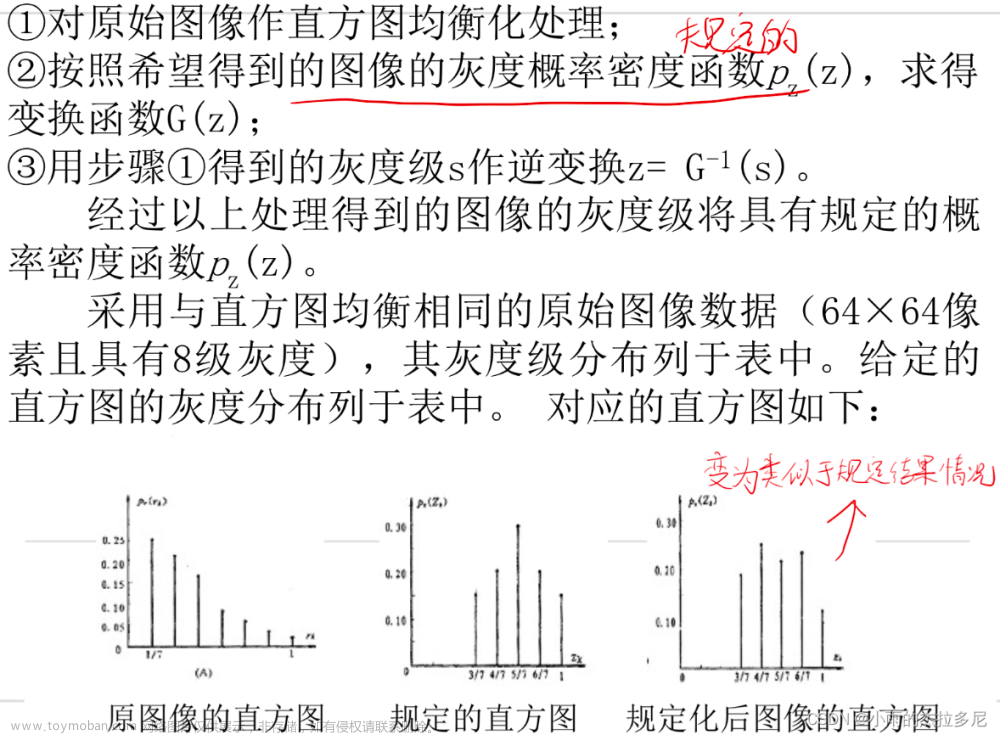
3.2 直方图规定化
变成规定形状,突出某些灰度级(是要先做直方图均衡化)
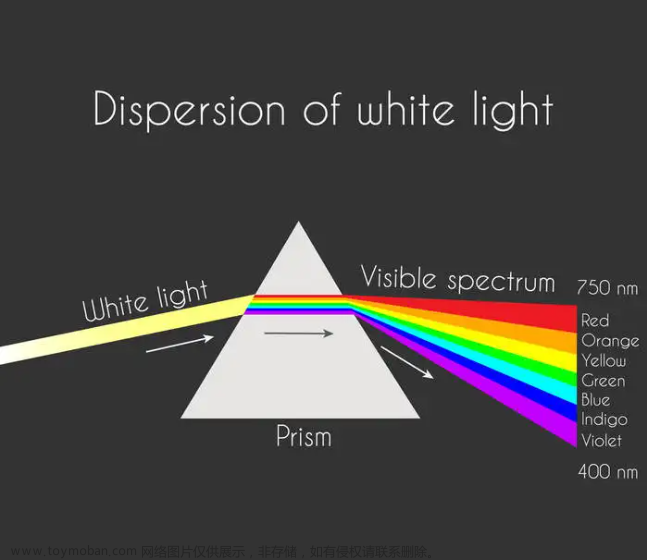
4. 彩色图像增强
伪彩色和假彩色增强区别:伪彩色是针对灰度图像处理,而假彩色是针对彩色图像处理的。
4.1 伪彩色
-
密度分割法:变换出的彩色数目有限
-
灰度-彩色变换合成法:三个通道按照比例合成不同颜色
- 频率域伪彩色增强
4.2 假彩色
目的:突出感兴趣目标、呈现匹配的颜色
主要是多通道的线性变换
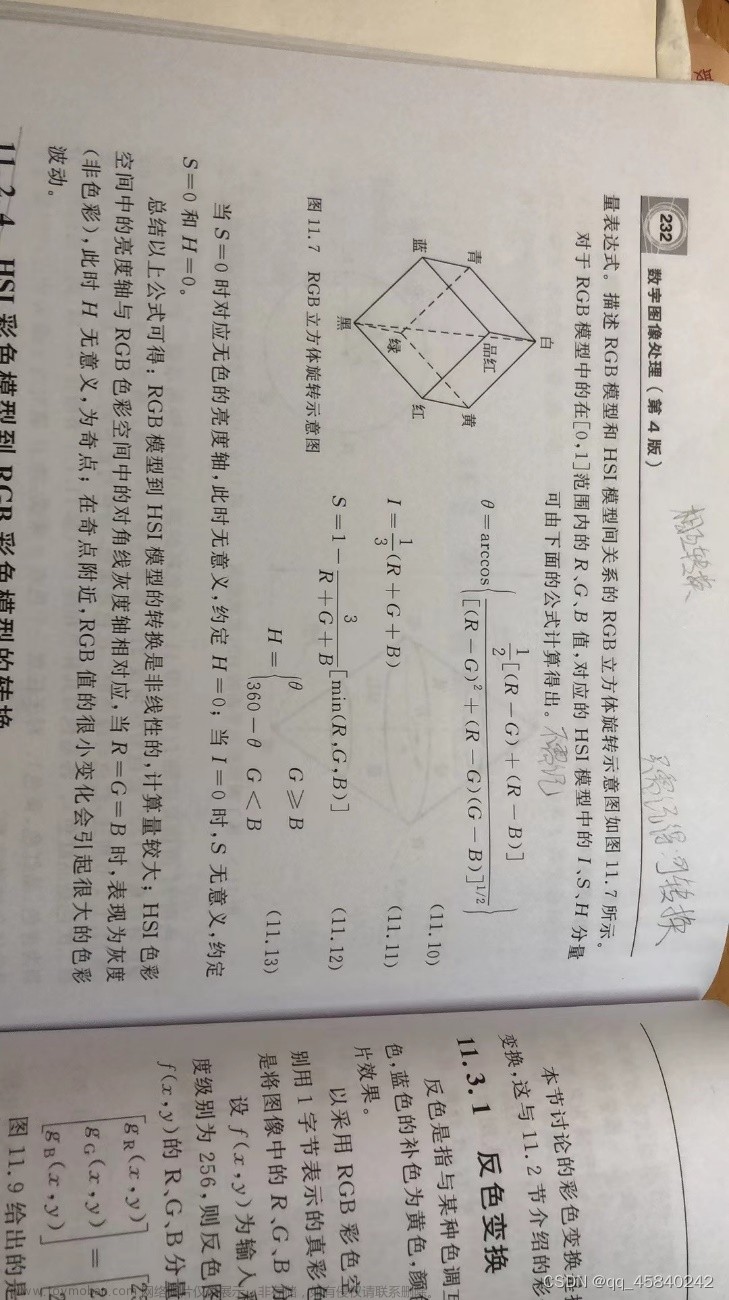
4.3 真彩色
RGB变为HIS,再增强某个分量,再变回RGB
5. 代数运算
相加:多个带noise图像相加,得到清晰图像
相减:去除背景、观察运动图像
相乘:mask
六、形态学处理
结构元:用来探测图像的小图像
1. 膨胀 & 腐蚀
膨胀
- 【映射后】结构元和原图像做与(相当于直接做卷积),如果有重叠则为1。
- 位移得到的所有图像取并。
腐蚀
- 结构元和原图像做与(相当于映射后卷积),如果完全重叠为1。
- 【映射后】位移得到的所有图像取交。
(A腐蚀B)补 = (A补)膨胀(B反射)
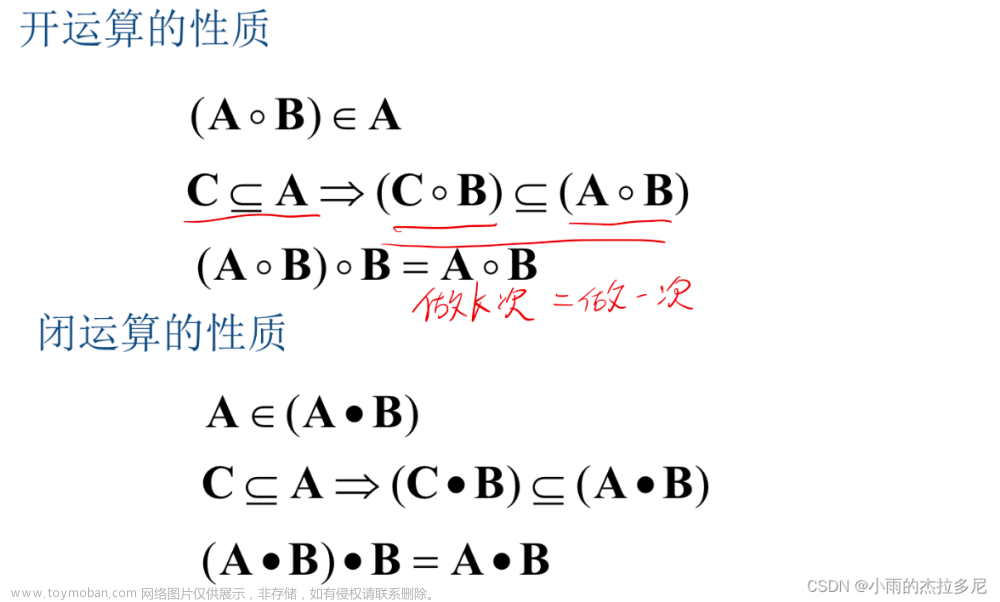
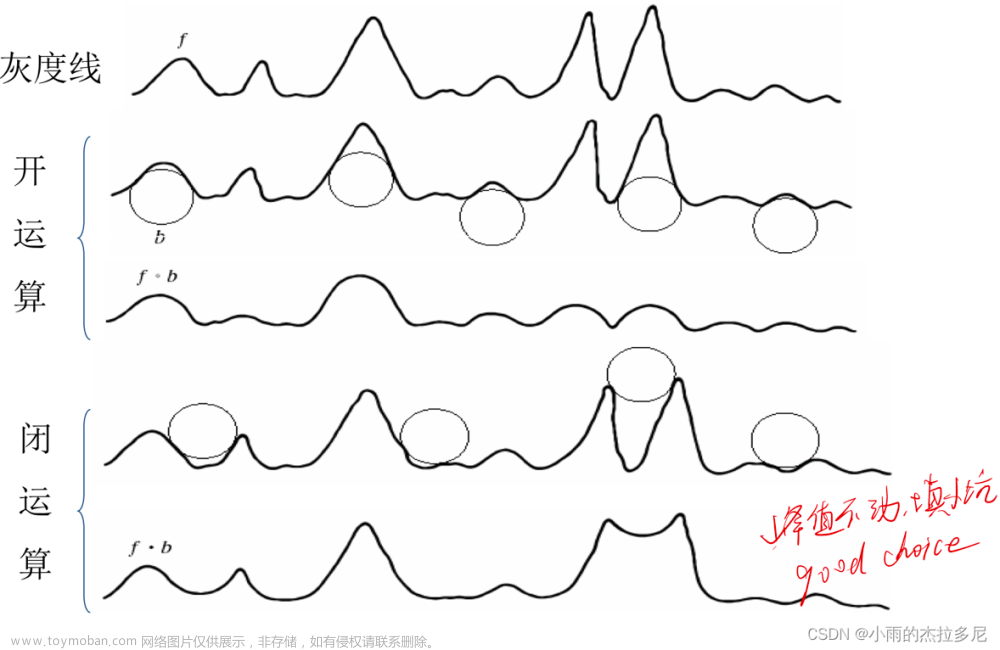
2. 开、闭运算
开就是先腐蚀再膨胀(能够让突出的部分变平滑)
闭就是先膨胀再腐蚀(能够让断裂的部分变连续)
3. hit & miss
击中击不中就是要找到恰好是当前结构的。
因此要正着腐蚀一次,反着腐蚀一次,求交集(都腐蚀到才算是找到了)。
4.应用
4.1 边界提取
原图减去腐蚀(腐蚀掉的部分就是边界)
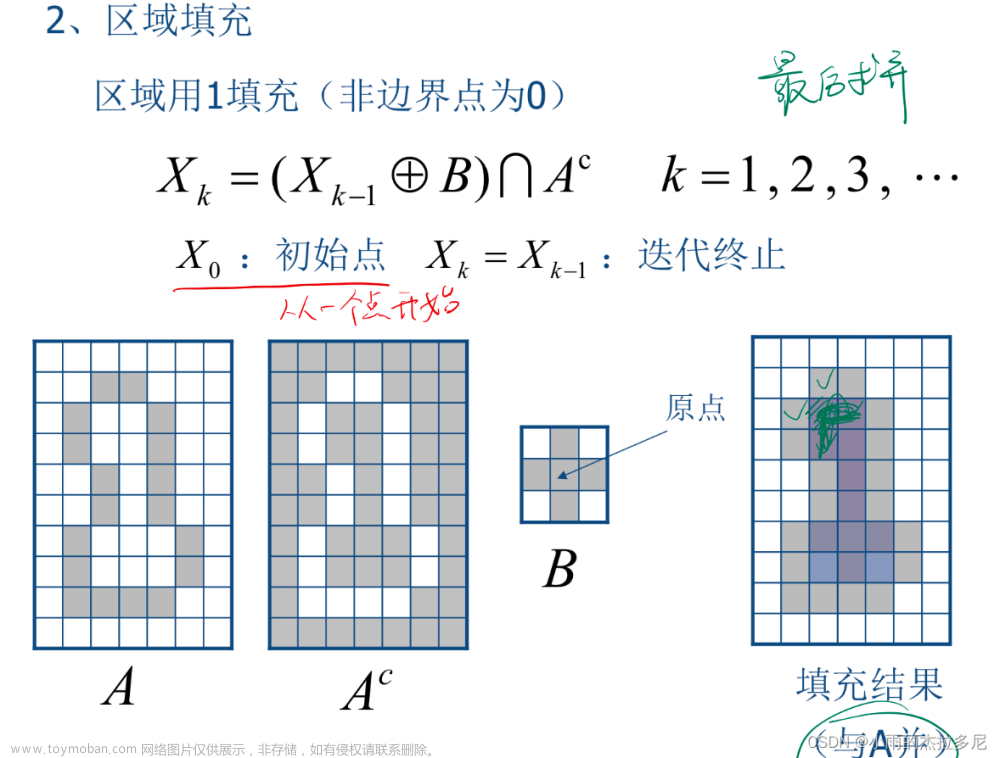
4.2 区域填充
在要填充部分的内部找一个seed,然后每次膨胀一次与A补求交。循环多次后再与A并
4.3 连通分量提取
和区域填充类似,只不过每一次是与原图像求的交集。就可以遍历得到连通分量。
4.4 凸包
每一轮分别用所有结构元进行hit&miss,直到不再变化。然后将每个结构元得到的结果求并。
4.5 细化 & 粗化
遍历所有结构元,在原图减去击中的部分。重复遍历所有结构元,直到图像不再变化。
粗化:每次并上击中的部分。直到不再变化
4.6 骨架提取
-
形态学提取
前两列相减得到第三列,对每一次的结果求并。

-
基于距离变换
- 提取图像边界(腐蚀一次取掉的部分)
- 对边界二值图求距离变换
- 距离变换的局部极大值
- 与原图像求交集得到骨架
其中局部极大值的部分最好是用可以与四周取等的结果来做(不要严格大于)。
具体的距离变换过程:就是用这样第一个模版,从左上向右下遍历一次。另一个模版右下到左上遍历一次。

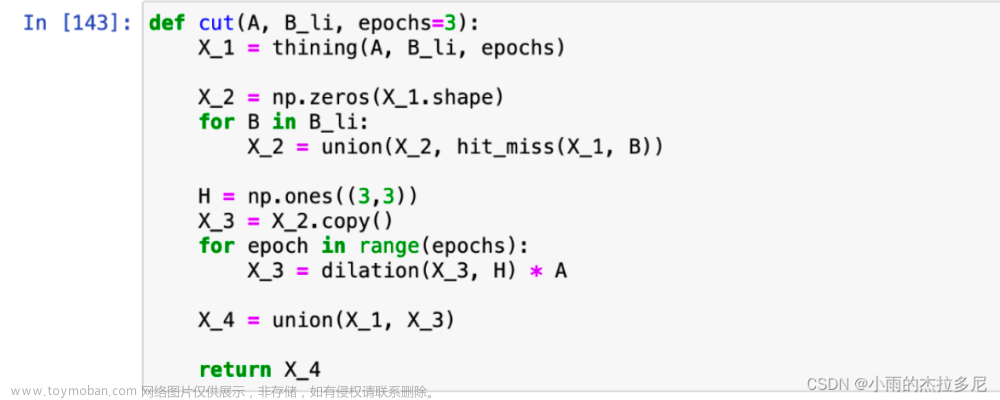
4.7 裁剪
目的就是去掉二值图中小的毛刺。
5. 灰度图形态学
膨胀:用求最大值来代替求和
腐蚀:用求最小值来代替求和
开运算:就相当于用球在灰度线上滚(去峰值)
闭运算:就相当于用球在灰度线下滚(填坑)
图像平滑:先开再闭
图像梯度:膨胀减腐蚀
高帽:原图减开运算,增强阴影细节(留下了峰值)
七、图像分割 & 边缘检测
1. 图像分割
把图像分成各具有同一特性的区域。
基于不连续性(边缘)、相似性(化为相似区域:阈值、区域生长等)
1.1 基于不连续性
1.1.1 奇异性检测
二维:孤立点、线、边缘
小波变换可以检测点、线、边缘的奇异性,可以解析并精确了解局部不连续性。可以检测奇异性、和其阶次。
点检测:
利用中心值增强的拉普拉斯模版滤波,响应值超过阈值的话,就相当于匹配上了。
线检测:
利用中间正,两侧负的模版,来检测线条。(平坦区域响应值是0)
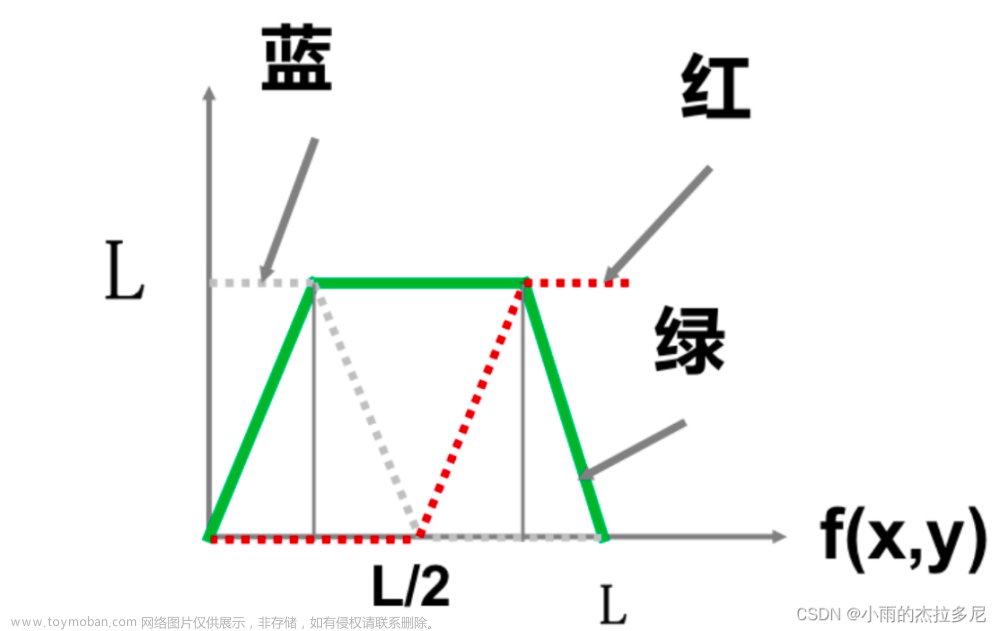
边缘检测:
梯形是器械成像结果。
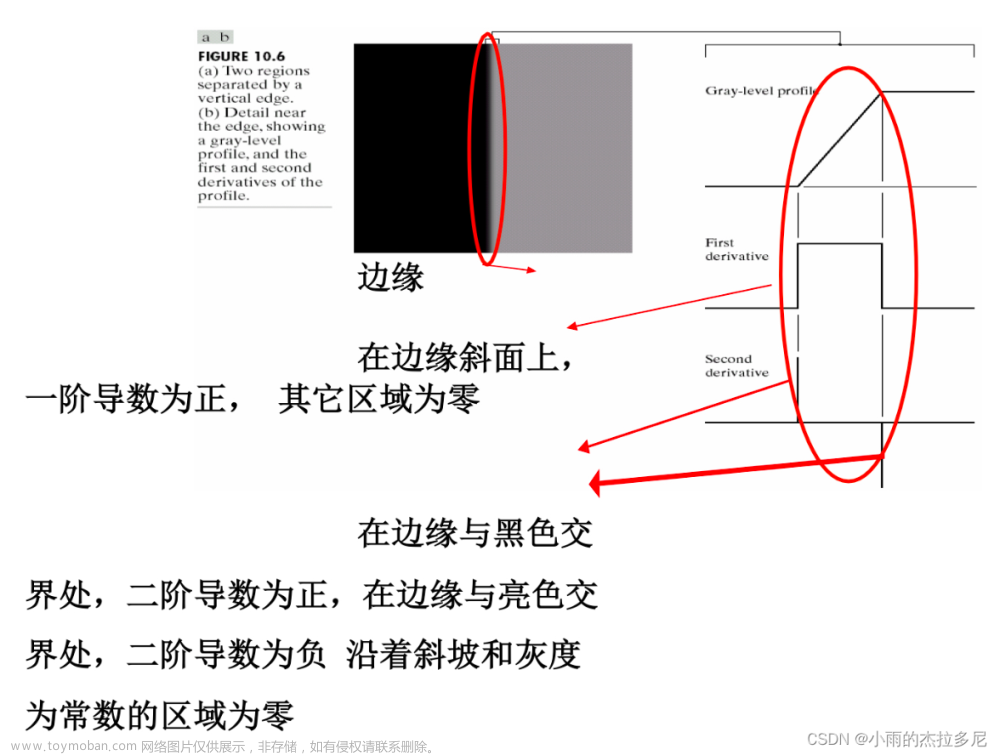
一阶导数:
- Roberts:2*2,适合处理边缘陡峭、噪声低的图像。
- Sobel和Prewitt:二者权值不一样,但都有噪声抑制能力。但出现宽边界
Canny算法步骤:
- 高斯滤波器平滑
- 计算梯度大小和方向
- NMS细化边缘
- 双阈值处理(大于hthr的一定是边缘,小于lthr的一定不是边缘,在他们之间的值如果和hthr边缘连接则算作边缘)
二阶导数(过0点就是边界):
- Laplacian算子(对noise敏感)
- LOG算子(先高斯,再Laplacian)【可能sharp边缘被扔掉】
- DOG(差分高斯函数简化LOG)
1.1.2 边缘连接、边界检测
需要将边缘连接完整(因为边缘必须连续且封闭)
- 可以利用梯度的垂直方向找寻边界,即局部处理。
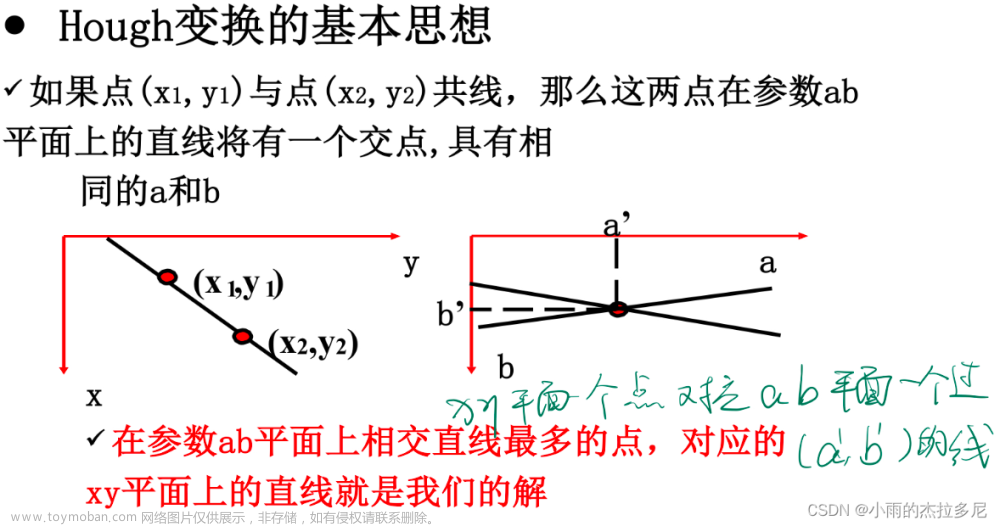
- 可以用Hough变换进行全局处理
Hough变换:
相交直线越多,则xy直线更是我们的解。用极坐标就可以解决垂直问题(盲点)
1.2 像素性质(阈值处理)
方法分类:阈值T仅取决于灰度值,则全局阈值;取决于灰度值和局部性质,则局部阈值;取决于坐标xy,则自适应。
-
基本全局阈值:划分后,将两类的灰度平均值取平均,再重新划分。(解决不了不均匀亮度)
-
基本自适应(分片)
-
最佳阈值
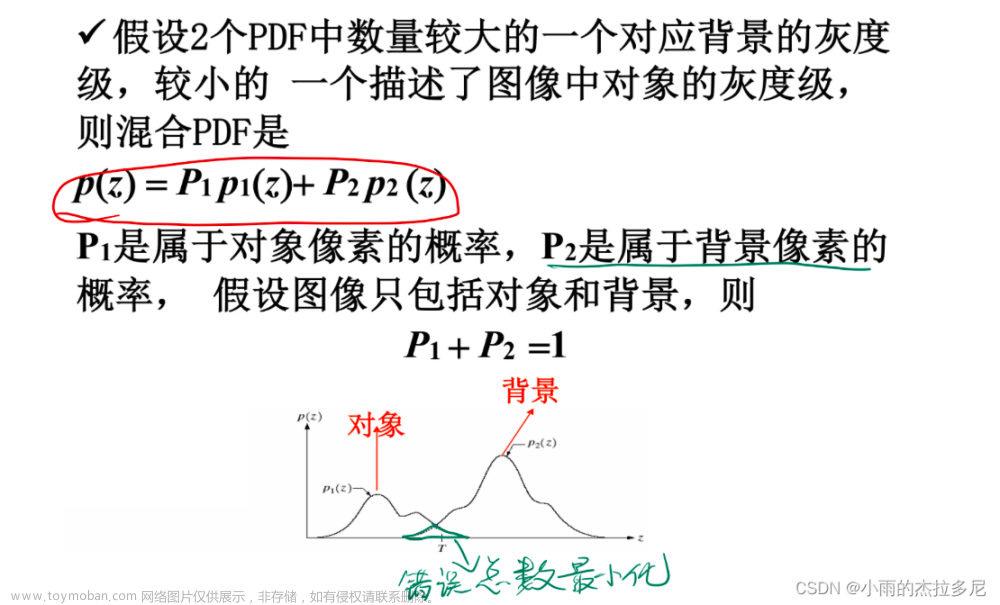
E1是背景像素被分为前景的错误率,E2是前景像素被分为背景的错误率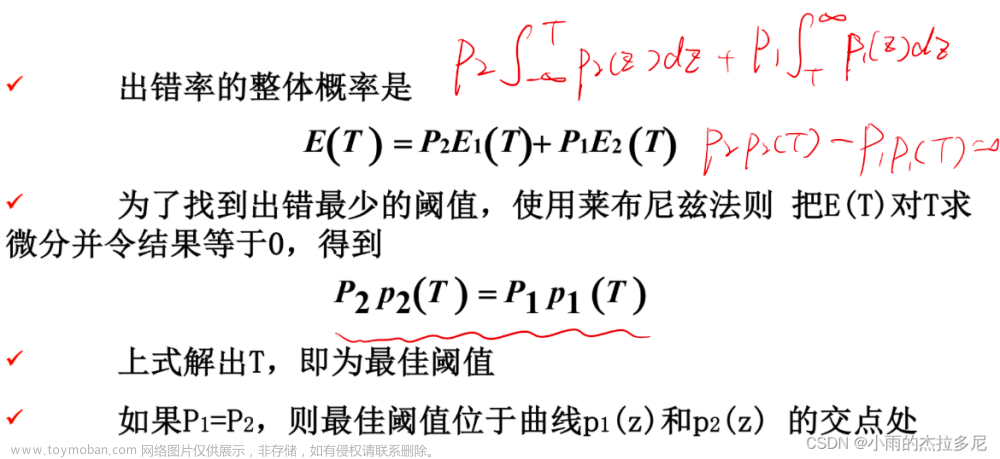
另外:如果此处两个概率密度函数都是高斯分布,则结果会怎样?(计算)
若两个sigma相同,则得到单一阈值;再此基础上,若先验P1=P2,则阈值为均值平均
-
边界区域选阈值
改善直方图形状,不考虑内部像素文章来源:https://www.toymoban.com/news/detail-761069.html
优点:可以让两个波峰更加对称、高度接近(不受区域内外的像素个数影响)文章来源地址https://www.toymoban.com/news/detail-761069.html
1.3 搜索区域(基于区域)
- 区域生长(种子像素,和并周围相似的像素)
- 四叉树分解(划分原图像为4块,如果不满足一致性,则继续分裂成4块。满足了的块就停止。最后所有块都满足一致性。)
- 平均灰度方法
- PDE方法(连续微分算子代替离散滤波、提取的边缘闭合)
- 活动轮廓模型(转化为曲线的能量最小化问题,其中第一项积分代表弧长,第二项代表振荡,第三项是负梯度相关。也就是要让曲线:短+光滑+过梯度大的点)
到了这里,关于【国科大课程】AI院 数字图像处理-杨戈、彭思龙的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!