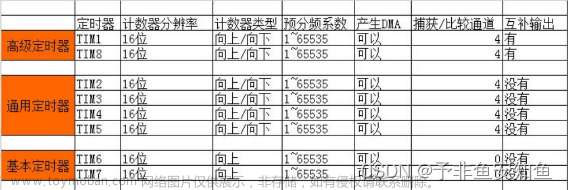
STM32的通用定时器
STM32单片机的通用定时器,有TIM2、TIM3、TIM4、TIM5这4个。
通用定时器的功能,用的比较多的有下面几种:
计数功能:向上计数,向下计数,向上/向下计数;
输入捕获:测量信号的周期和占空比;
输出比较:
PWM生成:
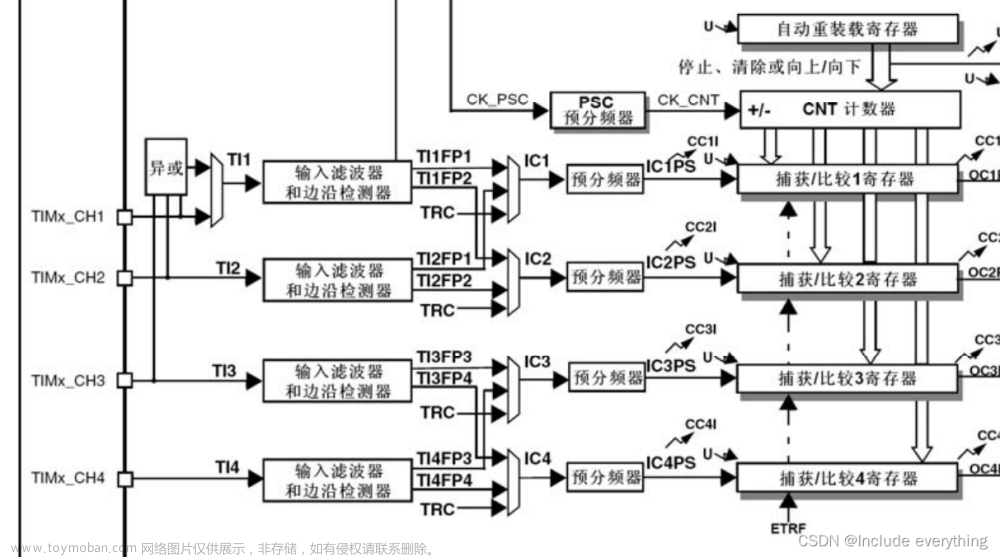
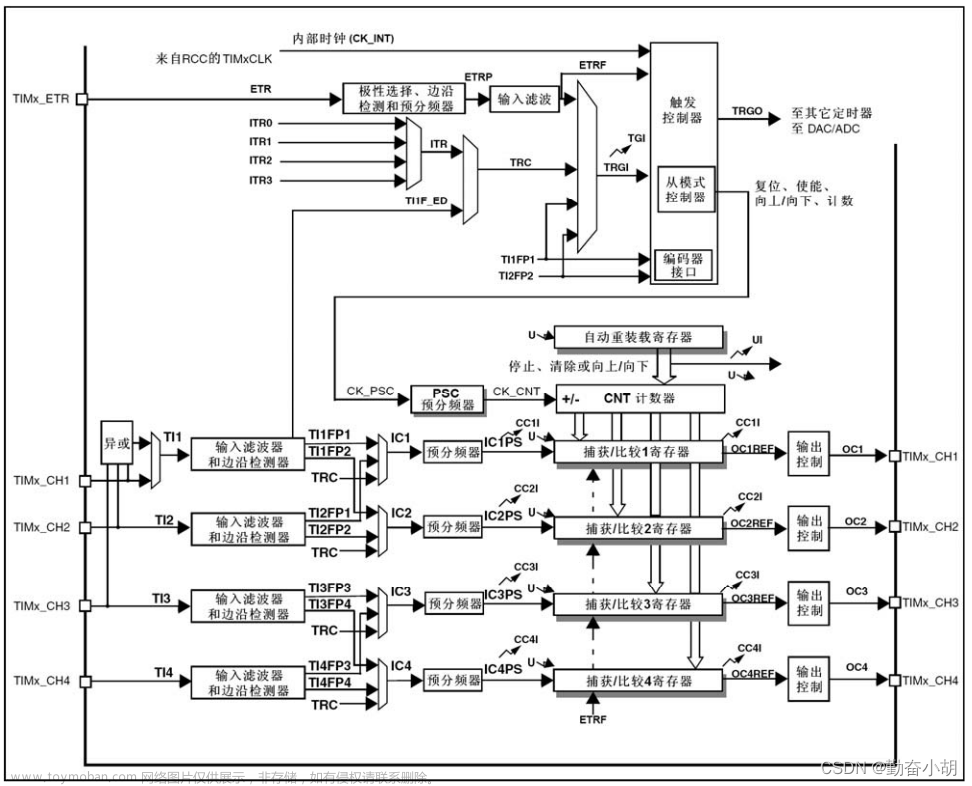
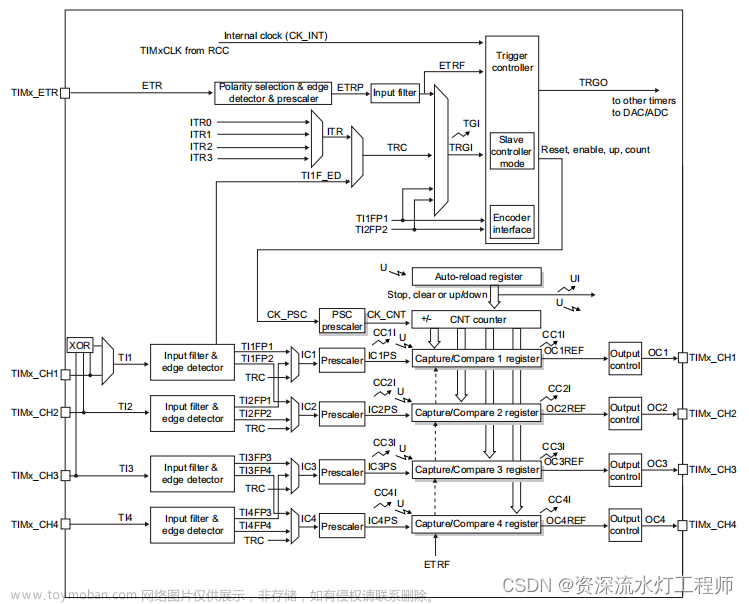
通用定时器框图
通用定时器功能多了,框图也就复杂起来了
通用定时器框图分解
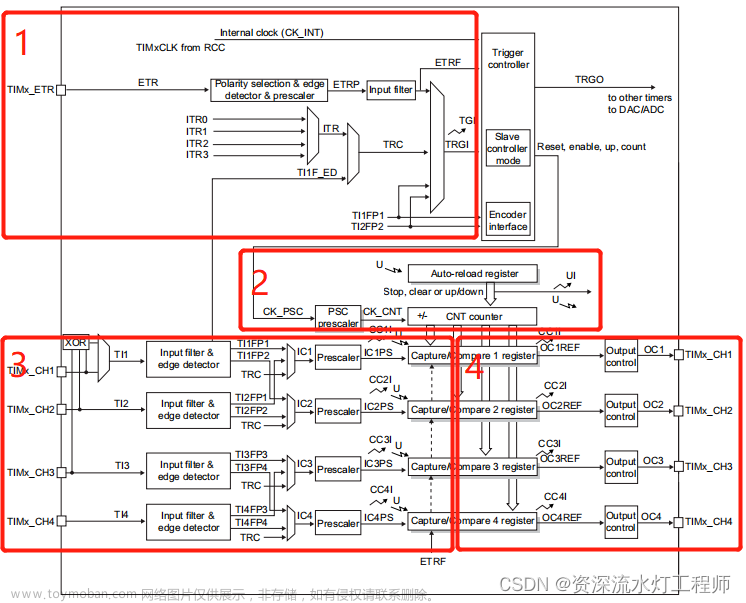
第一部分:时钟来源
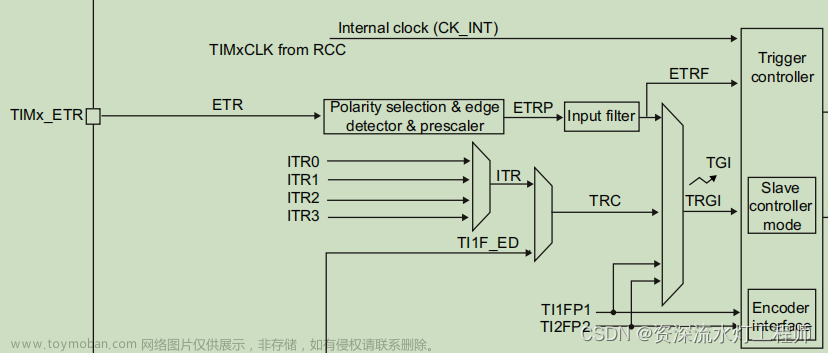
时钟来源有很多:
CK_INT、TIMx_ETR、ITR0、ITR1、ITR2、ITR3、TI1F_ED、TI1FP1、TI2FP2这9个,可以分下类;
CK_INT,就是定时器外设的时钟,比如72MHz,属于内部时钟
TIMx_ETR,就是定时器所对应的外部输入,这个外部输入信号经过相位检测、边缘检测和分频之后的信号就是ETRP,ETRP经过输入滤波之后又分成两路,一路直接用于时钟计数(跟CK_INT一样)这就是外部模式2(ETR2);一部分是作为出发信号给从模式控制器,就是外部模式1(ETR1)。
ITR0、ITR1、ITR2、ITR3,这几个的信号之后都是传给从模式控制器,就是两个定时器串联着使用,前面的那个定时器可以看成后面那个定时器的预分频器。
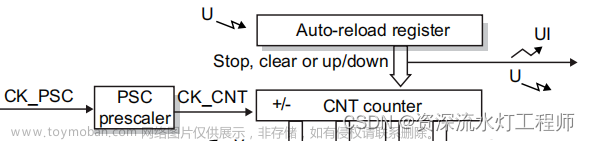
第二部分:时基单元
第三部分:输入捕获

TIMx_CH1 是定时器的输入引脚1
TIMx_CH2是定时器的输入引脚2
TIMx_CH3是定时器的输入引脚3
TIMx_CH4是定时器的输入引脚4
TI1FP1 是来自于通道TI1,经过输入滤波和边沿检测后送给捕获比较通道IC1;
TI1FP2是来自于通道TI1,经过输入滤波和边沿检测后送给捕获比较通道IC2;
TI1FP1和TI1FP2这两个信号的特性是一模一样的,都是通道1的信号经过滤波和边沿检测之后产生的信号,只是TI1FP1是送给捕获比较通道IC1,TI1FP2是送给捕获比较通道IC2。
TI2FP1是来自于通道TI2,经过输入滤波和边沿检测后送给捕获比较通道IC1;
TI2FP2是来自于通道TI2,经过输入滤波和边沿检测后送给捕获比较通道IC2;
TI2FP1和TI2FP2这两个信号的特性是一模一样的,都是通道2的信号经过滤波和边沿检测之后产生的信号,只是TI2FP1是送给捕获比较通道IC1,TI2FP2是送给捕获比较通道IC2。
TI3FP3是来自于通道TI3,经过输入滤波和边沿检测后送给捕获比较通道IC3;
TI3FP4是来自于通道TI3,经过输入滤波和边沿检测后送给捕获比较通道IC4;
TI3FP3和TI3FP4这两个信号的特性是一模一样的,都是通道3的信号经过滤波和边沿检测之后产生的信号,只是TI3FP3是送给捕获比较通道IC3,TI3FP4是送给捕获比较通道IC4。
TI4FP3是来自于通道TI4,经过输入滤波和边沿检测后送给捕获比较通道IC3;
TI4FP4是来自于通道TI4,经过输入滤波和边沿检测后送给捕获比较通道IC4;
TI4FP3和TI4FP4这两个信号的特性是一模一样的,都是通道4的信号经过滤波和边沿检测之后产生的信号,只是TI4FP3是送给捕获比较通道IC3,TI4FP4是送给捕获比较通道IC4。
这一块的意思大概是这样的:
通用定时器都有4个通道,CH1、CH2、CH3、CH4,分别都有外部的引脚对应;
外部的信号进入通道后,进行滤波的边沿检测,并生成两路一模一样的信号TIxFPx;
CH1和CH2可以看成一伙的,它们生成的两路信号是,你给我一个,我给你一个;
CH3和CH4也可以看成一伙的,它们生成的两路信号也是,你给一个我,我给一个你;
最后这些信号都是经过分频之后给捕获比较寄存器。
所谓捕获比较寄存器,对输入信号来说就是捕获寄存器,对输出信号来说就是比较寄存器。
第四部分:输出比较

通用定时器都有4个通道,CH1、CH2、CH3、CH4,这4个通道既可以是输入,也可以是输出;
用作输入的话就是输入捕获通道,用作输出的话就是输出比较通道。东西还是同一个东西,用法不同,名字就不同了。
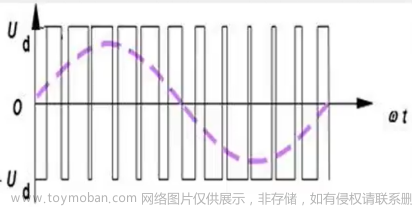
常见应用一:PWM输出
PWM模式其实也是输出比较模式的一种,它的工作原理也比较简单
1、以向上计数来说,设置时基单元的周期(也就是自动重装载寄存器的值)为1000,每次计数都是从0数到1000,一直循环;
2、在捕获比较寄存器中设置一个值,看你用的那个通道(一共就4个通道),比如用通道CH1,那就在CCR1中设置一个值,比如400;
3、现在就比较计数单元中计数寄存器的值和CCR1中的值(400)的大小了;
4、因为是向上计数,从0 开始的,那一开始肯定比400(CCR1)小了,这个时候可以让输出通道CH1对应的管脚输出某种电平。(这个时候新的概念就要出来了,PWM模式),假设输出极性为高,PWM2模式,那一开始就是输出低电平,在CNT从0计到400那段时间一直输出低电平,从400到1000就输出高电平。
输出极性与PWM模式的关系

个人觉得数字比字母方便理解一些

所以呢,PWM输出是不是很简单,不要怕定时器那个大框图,你只要拿你需要的那一小部分就可以了,针对PWM输出,只需要了解时钟源、时基单元、捕获比较寄存器这三个就可以了。
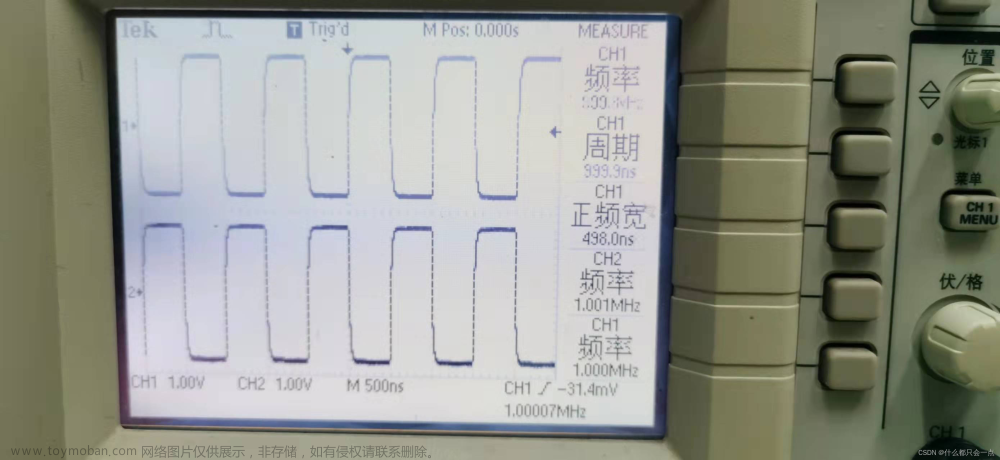
先输出一个固定频率和占空比的PWM信号,周期1000(是ms还是us自己根据需要设置),占空比40%(高电平的时间/周期,周期1000,高电平就是400)
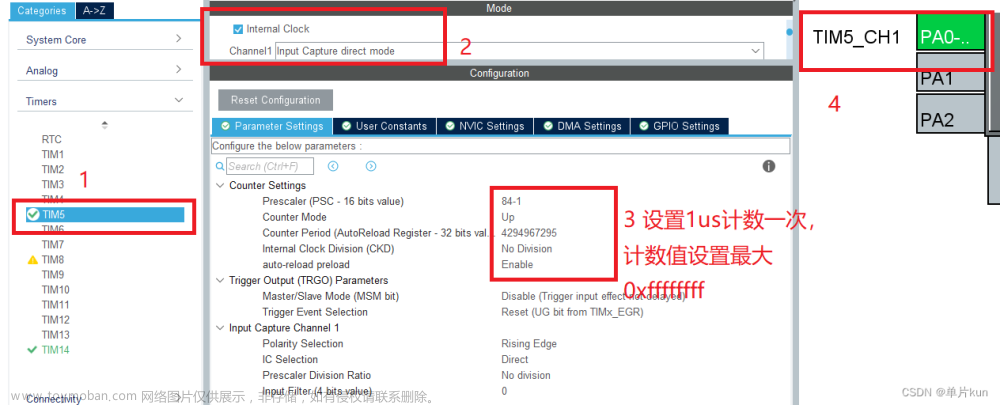
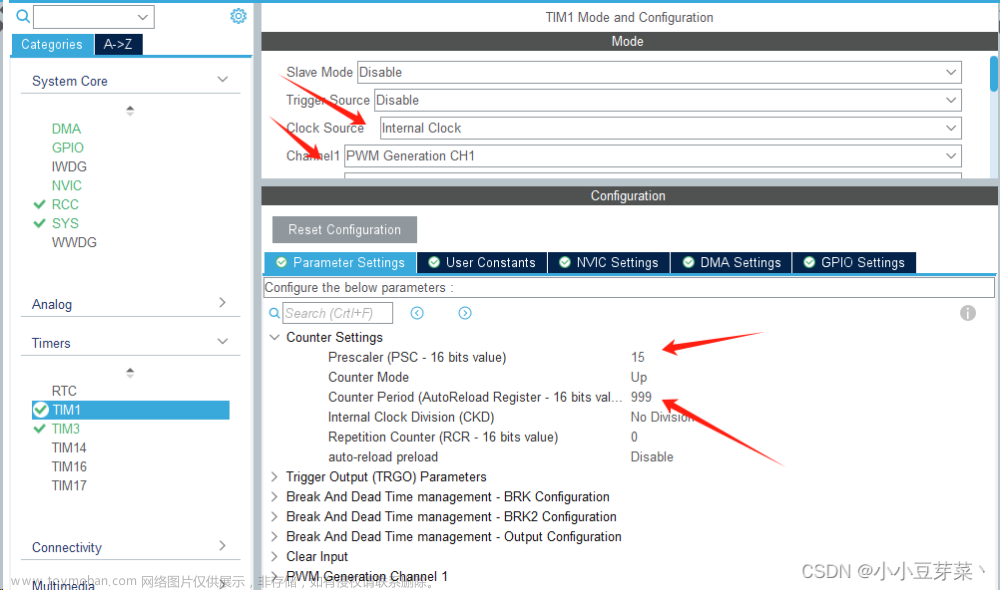
步骤:
1、设置时基单元的参数
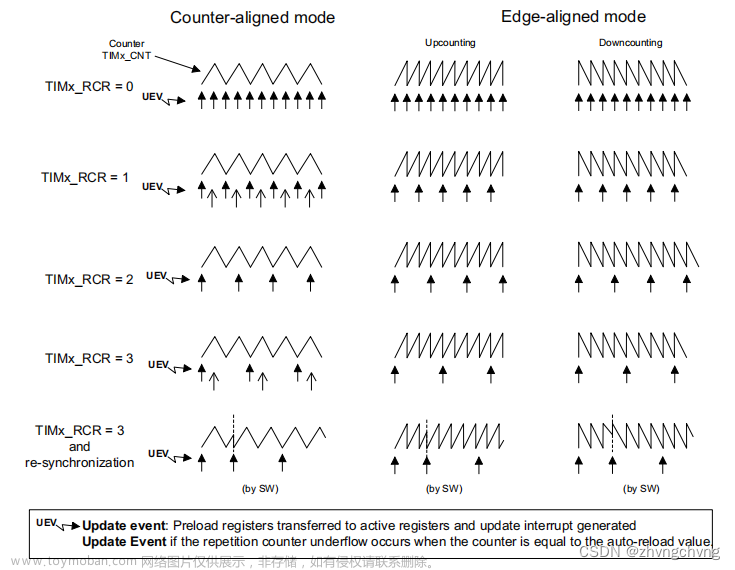
设置预分频系数;
设置计数模式;
设置周期(自动重装载寄存器的值);
2、设置时钟源
可以用内部时钟源CK_CNT,外部时钟源ETR,一般用内部时钟源
3、设置输出比较
设置输出比较模式:PWM1,PWM2;
设置Pulse(有的人叫这个位占空比,其实不合适,因为占空比指的是高脉冲的比例,个人觉得Pulse叫切换点合适些,反正就是比较寄存器里面的值,用这个值去跟CNT比大小);
设置PWM输出极性
4、设置输出管脚
既然是PWM输出,那肯定需要实在的引脚
5、都设置好了,就开始运行
还是用STM32CubeMX结合HAL库开做吧(CubeMX是好用,个人还是推荐HAL库+寄存器同时开发,这样又是一片新的天地)
使用定时器TIM3的第一通道(CH1)来输出固定占空比的PWM信号
tim源文件
#include "tim.h"
TIM_HandleTypeDef htim3;
/* TIM3 init function */
void MX_TIM3_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
htim3.Instance = TIM3; //使用定时器3
htim3.Init.Prescaler = 72-1; //72MHz时钟72分频,1MHz
htim3.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数
htim3.Init.Period = 1000-1; //周期1000
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; //选择内部时钟作为时钟源
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;//PWM模式1
sConfigOC.Pulse = 400; //占空比400/1000
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; //输出极性设置为高
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
HAL_TIM_MspPostInit(&htim3);
}
void HAL_TIM_Base_MspInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
__HAL_RCC_TIM3_CLK_ENABLE(); //使能定时器的时钟
}
}
void HAL_TIM_MspPostInit(TIM_HandleTypeDef* timHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(timHandle->Instance==TIM3)
{
__HAL_RCC_GPIOA_CLK_ENABLE();
//TIM3 PWM 输出引脚配置
GPIO_InitStruct.Pin = GPIO_PIN_6; //PA6对应CH1
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
}
void HAL_TIM_Base_MspDeInit(TIM_HandleTypeDef* tim_baseHandle)
{
if(tim_baseHandle->Instance==TIM3)
{
__HAL_RCC_TIM3_CLK_DISABLE();
}
}在main函数中加一行代码开启PWM输出即可,当然,也可以把这一行代码放在定时器的初始化函数中。
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);使用定时器TIM3输出一个占空比可调的PWM信号
如果要输出一个占空比可调的PWM信号,其实也很简单,就是改变对应通道的比较捕获寄存器的值就可以了,其他的跟固定占空比信号的设置一样就行。
这个改变占空比就是改变CCR寄存器的值,
CH1对应的是CCR1(捕获比较寄存器1)
CH2对应的是CCR2(捕获比较寄存器2)
CH3对应的是CCR3(捕获比较寄存器3)
CH3对应的是CCR4(捕获比较寄存器4)
HAL库正好也提供了设置CCR寄存器的函数
__HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__)
//__HANDLE__,就是使用的定时器,比如&htim3
//__CHANNEL__,就是对应的通道,比如TIM_CHANNEL_1
//__COMPARE__,就是要设置到比较捕获寄存器的值
#define __HAL_TIM_SET_COMPARE(__HANDLE__, __CHANNEL__, __COMPARE__) \
(((__CHANNEL__) == TIM_CHANNEL_1) ? ((__HANDLE__)->Instance->CCR1 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_2) ? ((__HANDLE__)->Instance->CCR2 = (__COMPARE__)) :\
((__CHANNEL__) == TIM_CHANNEL_3) ? ((__HANDLE__)->Instance->CCR3 = (__COMPARE__)) :\
((__HANDLE__)->Instance->CCR4 = (__COMPARE__)))在前面例程的基础上,在main函数的大循环里面加一段代码
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);
while (1)
{
//设置捕获比较寄存器的值,每隔10ms加1,实现占空比一直动态调节
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_1,cmp++);
//占空比到1000后,有从0开始,慢慢增加
if(cmp ==1000)
{
cmp = 0;
}
//延时10ms
HAL_Delay(10);
}
}工程链接:
STM32F103ZET6定时器TIM3,通道1,PWM输出,占空比可调资源-CSDN文库
如果用中断的方式改变占空比,就需要在main函数中调用PWM中断开始函数,然后编写回调函数,基本代码如下,细节部分自己去研究一下。文章来源:https://www.toymoban.com/news/detail-761246.html
HAL_TIM_PWM_Start_IT(&htim3,TIM_CHANNEL_1);
extern uint16_t cmp;
void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim)
{
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, cmp++);
if(cmp == 1000)
{
cmp = 0;
}
}STM32单片机的定时器内容太多,参考手册总共1134页,定时器的内容就有200页,可见内容之多。主要是因为定时器的应用领域太多,功能太强大,还是要慢慢的学下去。。。。。。文章来源地址https://www.toymoban.com/news/detail-761246.html
到了这里,关于STM32学习----通用定时器的应用(PWM)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!