一、引言
在嵌入式系统设计中,UART通信是一种广泛使用的串行通信协议,它通过两条信号线实现全双工的数据传输和接收。UART通信协议以其简单、灵活和易于集成的特点,在嵌入式设备之间以及与外部设备进行通信时发挥着重要作用。本文将详细介绍UART通信的工作原理、特点和实现方式。
二、UART通信工作原理
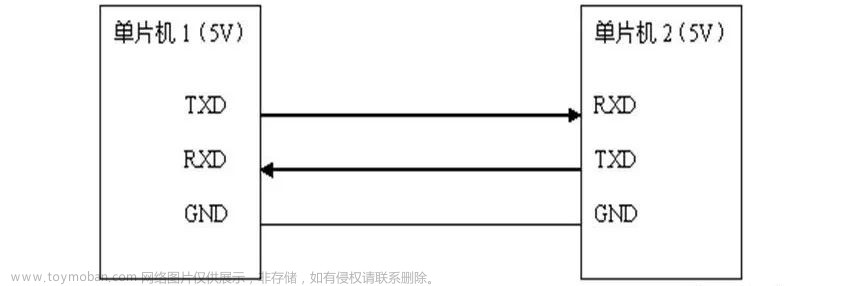
UART通信是一种异步串行通信方式,它使用两条信号线进行数据传输:发送数据线(TX)和接收数据线(RX)。在UART通信中,字符是传输的基本单位,每个字符由一位起始位、若干位数据位(根据需要可变)和一位停止位组成。数据在发送端被逐位发送,在接收端逐位接收。
UART通信协议的主要特点包括:
- 异步串行通信:UART通信的字符间时间间隔是不固定的,但在同一个字符中的两个相邻位间的时间间隔是固定的。
- 全双工通信:UART通信支持同时进行数据发送和接收,实现了数据的双向传输。
- 可配置的数据格式:根据需要,可以配置不同的数据格式,包括数据位的数量、起始位和停止位的数量等。
协议,如图所示:


-
报头
报头是确定您是否在与正确的设备通信的唯一标识符。
-
命令(CMD)选择
命令将取决于用于创建两个设备之间通信的命令列表。
-
每个命令的数据长度(DL)
数据长度将取决于所选的命令。您可以根据所选的命令来使数据长度最大化,因此它会随选择而变化。在这种情况下,数据长度可以调整。
-
数据n(可变数据)
数据是要从设备传输的有效载荷。
-
报尾1(T1为0xE1)和报尾2(T2为0xE2)
报尾是在传输结束后添加的数据。就像报头一样,报尾也可以唯一标识符。
-
循环冗余校验(CRC公式)
循环冗余校验公式是一种附加的错误检测模式,用于检测原始数据是否发生意外更改。发送设备的CRC值必须始终等于接收器端的CRC计算值。
三、UART通信的实现方式
在嵌入式系统中,UART通信的实现通常依赖于硬件抽象层(HAL)库或类似的库函数。这些库函数提供了与硬件设备交互的接口,使开发者能够轻松地配置和管理UART通信。
以下是一个简单的UART通信实现示例:
- 初始化UART:首先,需要初始化UART硬件设备,包括配置信号线、设置波特率、数据位、停止位等。初始化过程通常涉及到设置UART控制寄存器和波特率寄存器等。
- 发送数据:在发送数据之前,需要将待发送的数据写入发送缓冲区。然后启动发送过程,数据就会从发送缓冲区逐位发送出去。
- 接收数据:在接收数据时,首先需要从接收缓冲区读取数据。当接收到新的字符时,可以通过读取接收缓冲区来获取数据。
- 错误处理:在UART通信过程中,可能会遇到各种错误情况,如发送或接收过程中断、数据溢出等。因此,需要对这些错误情况进行检测和处理,以保证通信的稳定性和可靠性。
四、结论
优点
-
仅使用两根电线
-
无需时钟信号
-
具有奇偶校验位以允许进行错误检查
-
只要双方都设置好数据包的结构
-
有据可查并得到广泛使用的方法
缺点
-
数据帧的大小最大为9位
-
不支持多个从属系统或多个主系统
-
每个UART的波特率必须在彼此的10%之内文章来源:https://www.toymoban.com/news/detail-762476.html
UART通信是一种简单、灵活且易于集成的串行通信协议,广泛应用于嵌入式系统设计中。通过了解和掌握UART通信的工作原理和实现方式,开发者可以更好地利用这一协议进行嵌入式设备间的串行通信,提高系统的可靠性和稳定性。随着嵌入式技术的不断发展,我们有理由相信,UART通信将在未来的嵌入式应用中发挥更大的作用。文章来源地址https://www.toymoban.com/news/detail-762476.html
到了这里,关于单片机——通信协议(UART协议解析篇)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!