目录
一、串口工具安装
二、使用Windows本身虚拟的串口
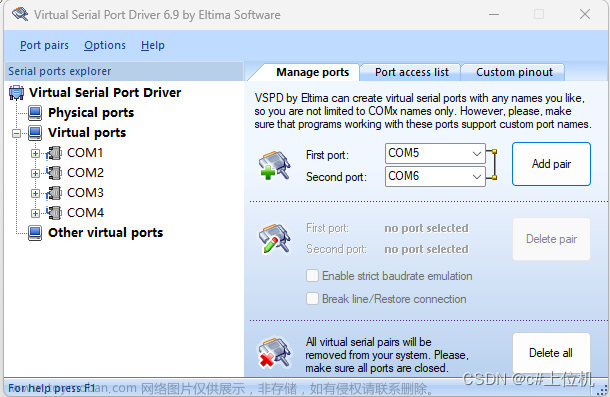
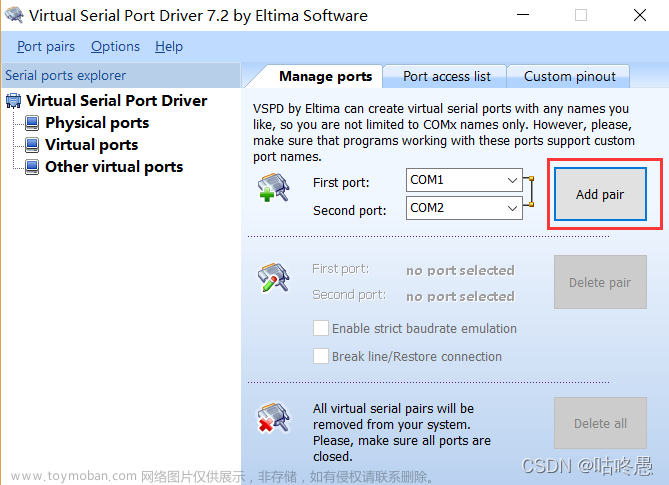
(一)添加串口
1、保证虚拟机是关闭状态,打开“虚拟机设置”,点击“添加”。
2、选中“串行端口”,点击“完成”。
3、选中刚添加的串口,下拉选择自己需要使用的端口,点击完成即可。
(二)注册权限
1、注意:在使用串口进行通信时,需要先注册其权限。
2、注册完权限后,打开CuteCom,选择串口,再点击Open,即可打开。如果没有注册权限,则打不开。
3、打开成功:
(三)通讯测试
三、添加虚拟串口
原文:
1.下载socat
2.使用socat配置虚拟串口
3.重新打开终端 编写串口通信的代码
4.执行程序
5.总结
一、串口工具安装

安装cute:
sudo apt-get install cutecom安装完成,打开如下,点击“Settings”可以进行设置:


二、使用Windows本身虚拟的串口
(一)添加串口
1、保证虚拟机是关闭状态,打开“虚拟机设置”,点击“添加”。

2、选中“串行端口”,点击“完成”。

3、选中刚添加的串口,下拉选择自己需要使用的端口,点击完成即可。

进行查看:

(二)注册权限
1、注意:在使用串口进行通信时,需要先注册其权限。
//注册所有:
sudo chmod 777 /dev -R2、注册完权限后,打开CuteCom,选择串口,再点击Open,即可打开。如果没有注册权限,则打不开。

3、打开成功:

(三)通讯测试
1、在Windows下开启串口助手,选择与Ubuntu添加的端口成对的另一个虚拟串口,并使用Hex编码;
2、CuteCom选择Hex的编码方式,再随机输入发送的内容,按回车即可发送,然后就能在Windows上的串口助手上看到发送过来的数据了。


三、添加虚拟串口
原文:
https://blog.csdn.net/qq_62106718/article/details/130949814
使用socat完成虚拟串口的配置
1.下载socat
sudo apt install socat2.使用socat配置虚拟串口
socat -d -d pty,raw,echo=0 pty,raw,echo=0可以看到配置好的两个虚拟串口的路径:/dev/pts/3 /dev/pts/3, 不要关闭该进程。

3.重新打开终端 编写串口通信的代码
#include <stdio.h>
#include <stdlib.h>
#include <strings.h>
#include <string.h>
#include <pthread.h>
#include <unistd.h>
#include <fcntl.h>
#include <stdlib.h>
#include <error.h>
#include <termios.h>
#include <malloc.h>
#include <sys/types.h>
#include <sys/stat.h>
typedef struct termios termios_t;
typedef struct serial_data{
char databuf[100];//发送/接受数据
int serfd;//串口文件描述符
}ser_Data;
void *sersend(void *arg);
void *serrecv(void *arg);
int main(int argc,char *argv[])
{
pthread_t pid1,pid2;
pthread_attr_t *pthread_arr1,*pthread_arr2;
pthread_arr1 = NULL;
pthread_arr2 = NULL;
int serport1fd;
/* 进行串口参数设置 */
termios_t *ter_s = malloc(sizeof(*ter_s));
serport1fd = open(argv[1],O_RDWR | O_NOCTTY | O_NDELAY);//不成为控制终端程序,不受其他程序输出输出影响
if(serport1fd < 0){
printf("%s open faild\r\n",argv[1]);
return -1;
}
bzero(ter_s,sizeof(*ter_s));
ter_s->c_cflag |= CLOCAL | CREAD; //激活本地连接与接受使能
ter_s->c_cflag &= ~CSIZE;//失能数据位屏蔽
ter_s->c_cflag |= CS8;//8位数据位
ter_s->c_cflag &= ~CSTOPB;//1位停止位
ter_s->c_cflag &= ~PARENB;//无校验位
ter_s->c_cc[VTIME] = 0;
ter_s->c_cc[VMIN] = 0;
/*1 VMIN> 0 && VTIME> 0
VMIN为最少读取的字符数,当读取到一个字符后,会启动一个定时器,在定时器超时事前,如果已经读取到了VMIN个字符,则read返回VMIN个字符。如果在接收到VMIN个字符之前,定时器已经超时,则read返回已读取到的字符,注意这个定时器会在每次读取到一个字符后重新启用,即重新开始计时,而且是读取到第一个字节后才启用,也就是说超时的情况下,至少读取到一个字节数据。
2 VMIN > 0 && VTIME== 0
在只有读取到VMIN个字符时,read才返回,可能造成read被永久阻塞。
3 VMIN == 0 && VTIME> 0
和第一种情况稍有不同,在接收到一个字节时或者定时器超时时,read返回。如果是超时这种情况,read返回值是0。
4 VMIN == 0 && VTIME== 0
这种情况下read总是立即就返回,即不会被阻塞。----by 解释粘贴自博客园
*/
cfsetispeed(ter_s,B115200);//设置输入波特率
cfsetospeed(ter_s,B115200);//设置输出波特率
tcflush(serport1fd,TCIFLUSH);//刷清未处理的输入和/或输出
if(tcsetattr(serport1fd,TCSANOW,ter_s) != 0){
printf("com set error!\r\n");
}
char buffer[] = {"hello my world!\r\n"};
char recvbuf[100] = {};
ser_Data snd_data;
ser_Data rec_data;
snd_data.serfd = serport1fd;
rec_data.serfd = serport1fd;
memcpy(snd_data.databuf,buffer,strlen(buffer));//拷贝发送数据
pthread_create(&pid1,pthread_arr1,sersend,(void *)&snd_data);
pthread_create(&pid2,pthread_arr2,serrecv,(void *)&rec_data);
ssize_t sizec;
while(1){
usleep(100000);
}
pthread_join(pid1,NULL);
pthread_join(pid2,NULL);
free(ter_s);
return 0;
}
void *sersend(void *arg)//串口发送线程函数
{
ser_Data *snd = (ser_Data *)arg ;
int ret;
while(1){
scanf("%s",snd->databuf);
ret = write(snd->serfd,snd->databuf,strlen(snd->databuf));
if(ret > 0){
printf("send success, data is %s\r\n",snd->databuf);
}else{
printf("send error!\r\n");
}
usleep(300000);
/*
if(发生中断)
break;//退出
*/
}
}
void *serrecv(void *arg)//串口发送线程函数
{
ser_Data *rec= (ser_Data *)arg ;
int ret;
while(1){
ret = read(rec->serfd,rec->databuf,1024);
if(ret > 0){
printf("recv success,recv size is %d,data is %s\r\n",ret,rec->databuf);
}else{
/*
什么也不做
*/
}
usleep(1000);
/*
if(发生中断)
break;//退出
*/
}
}使用下面命令编译
gcc serial.c -o serial -lpthread4.执行程序
认真看上面的串口通信代码 在运行程序需要传入main函数的参数,该参数就是虚拟串口的位置
所以执行下面的命令运行程序
./serial /dev/pts/2再打开一个终端输入下面命令文章来源:https://www.toymoban.com/news/detail-762600.html
./serial /dev/pts/35.总结
如果出现open fail 可能原因:权限不够 或者 虚拟串口关闭或位置错误文章来源地址https://www.toymoban.com/news/detail-762600.html
到了这里,关于ubuntu 安装串口工具和添加虚拟串口的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!