1.DS18B20相关背景知识
1.温度传感器
(1)测温度的方式:物理(汞柱,气压),电子(金属电性能随温度变化)
(2)早期:热敏电阻(模拟接口---》A/D转换)
(3)现代:专用sensor(数字接口,如I2C,DS18B20单总线接口等)
2.DS18B20的基本特征
DS18B20可编程分辨率单总线温度传感器
(1)内置集成ADC,外部数字接口
(2)单总线数字接口,布线成本低【单根数据线进行传输】---》串口【一根线】
(3)温度范围宽,精度率高(相对)---》内部的精确度可以调节
(4)数字值温度分辨率位数可软件设置---》内部的A/D转换器【位数越多,精度越高】
(5)温度阈值报警功能,且阈值(TH和TL)可内置存储掉电不丢失(使用EEPROM)
(6)温度采集速度快(750ms)---》CPU下命令进行A/D转换,然后通过数据总线将数据传输出去。
(7)内置唯一64位的序列码,CPU可以单线串联无限多个DS18B20
(8)支持VDD供电,或通过数据总线(DQ)及内部电容实现寄生电源供电【使用DQ供电】--------》如果使用DQ供电,则表示DQ要一直为高电平(1),如果DQ为低电平(0),则与GND两者都是低电平,无法供电。实际上在DS18B20内部还有一个电容,当DQ为1的时候,会一边供电,一边给电容充电;当DQ为低电平的时候,电容会放电供DS18B20使用。使用我们平常都将DQ置为高电平(1)防止出现两根线都为低电平。
(9)没有CLK,所以是异步通信




3.综合评价
(1)DS18B20是很多年前的东西
(2)现在趋向于温度+湿度的综合传感器
(3)现实应用一般低端用热敏电阻【单片机中有A/D+热敏电阻即可】,热点偶,高端用精度传感器
(4)学习难点是单总线协议的时序编程实现
2.原理图
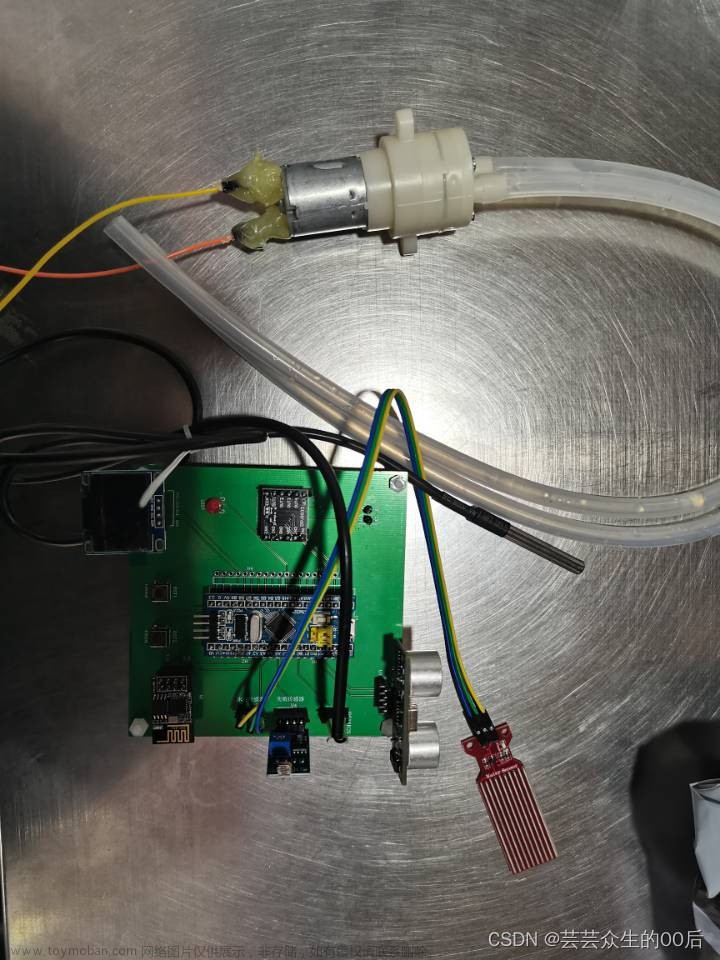
1.原理图确认

2.实体图确认

3.接线确认
注意不要接反了,否则很容易烧坏

3.数据手册
DS18B20数据手册-中文版 - 知乎 (zhihu.com)
ds18b20数据手册-中文版-140407 - 豆丁网
https://atta.szlcsc.com/upload/public/pdf/source/20230321/E2B7C84673F98AE08C6B0E4EDF67430D.pdf
1.基本性能


2.结构框图


3.测温操作



4.报警操作信号


5.6 4 位 只 读 存 储 器

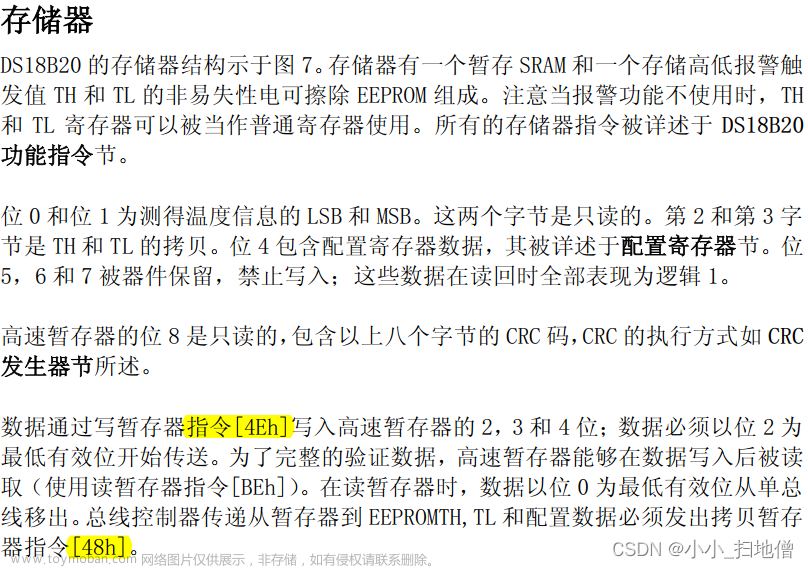
7.存储器


8.温度寄存器


3.单总线系统
1.“多点”VS“单点”
单总线系统采用一个单总线控制器(CPU)来控制一个活多个从机。DS18B20总是充当从机。
当只有一个从机挂在总 线上时,系统被称为“单点”系统;
如果由多个从机挂在总线上,系统被称为“多点”系统。
2.字节从低位开始读
所有的数据和指令的传递都是从最低有效位开始通过单总线的。
关于单总线系统分三个方面讨论:硬件结构、执行序列和单总线信号(信号类型和时序)。
3.硬件结构
单总线硬件连接要求:
(1)漏极开路式+5K欧姆是上拉电阻
(2)总线低电平超过480us,从设备(DS18B20)将被复位


4.单总线协议标准执行步骤
(1)主机必须按照单总线协议设定好的完整序列和DS18B20通信,每一个回合包含3个步骤:
初始化+ROM操作指令+功能操作指令。
顺序不能错也不能省略任何一个。

1.初始化
通过单总线的所有执行操作都从一个初始化程序序列开始。初始化序列包含一个由总线控制器发出的复位脉冲(将总线拉低超过480us)和 其后由从机发出的存在脉冲(回复主设备)。存在脉冲让总线控制器知道DS18B20在总线上且已经准备好操作。
初始化:就是主设备线拉低数据总线超过480us以发出一个复位脉冲,然后从设备DS18B20收到复位脉冲后内部进行硬件复位,复位完成后回复主设备一个存在脉冲,主设备接收到存在脉冲后就认为从设备已经准备好,初始化完成。
复 位 序 列 : 复 位 和 存 在 脉 冲
1)先将DATA电平拉低
2)延时480us
开始读取数据
3)主设备将DATA拉高
4)从设备将电平拉低,延时60-240us


// 返回0则表示初始化成功,返回1则表示初始化失败
static unsigned char ds18b20_init(void){
unsigned char i=0;
//按照时序图先将数据线电平拉低
DATA=0;//拉低480us-960us
Delay750us();// 实际延时750us,符合480-960之间的条件
//按照时序图将电平拉高【释放总线】
DATA=1;//然后拉高总线,如果DS18B20做出反应会将在15us~60us后总线拉低
i=0;
while(DATA){//等待DS18B20拉低总线
i++;
if(i>5)//等待>5s【超时】
{
return 1;//初始化失败
}
Delay15us();//每隔15us去读一次
}
return 0;//初始化成功
}2.ROM指令


3.功能指令

4.读 / 写 时 序
1. 写时序--CPU控制
(1)DS18B20有两种写时序:写1时序和写0时序。总线控制器通过写1时序来写逻辑1;通过写0时序来写逻辑0。
写 时序必须最少持续60us,包括两个写周期之间至少1us的恢复时间。【无法连续读】
当总线控制器把数据线从逻辑高电平拉低到低电 平的时候,写时序开始。
(2)总线控制器要写产生一个写时序,必须把数据线拉到低电平然后释放,且需在15us内释放总线。当总线被释放【变为高电平】后, 上拉电阻将总线拉高。总线控制器要生成写0时序,必须把数据线拉到低电平且继续保持至少60us。
(3)总线控制器初始化写时序后,DS18B20在一个15us到60us的窗口内对信号线进行采用【DS18B20将数据接收走--》采样时间不固定】。如果线上是高电平,就 是写1。反之,如果线上是低电平,就是写0。

1. 写“0”


2. 写“1”

3.官方代码实现
//在开始之前数据总线是释放的【高电平】
//所以在调用这个函数之前要确保数据总线状态为1
void Ds18b20WriteByte(unsigned char dat)
{
unsigned int i = 0, j = 0;
for (j=0; j<8; j++)
{
DSPORT= 0; //每写入一位数据之前先把数据总线拉低1us
i++;//中间间隔1us,因为太小了,所以不能使用delay
DATA = dat & 0x01; //然后写入一个数据,从最低位开始
delay70us(); // 时序要求最少60us
DSPORT= 1; //然后释放总线,至少1us给总线恢复时间才能接着写入第二个数值
dat >>= 1; //这句代码就代表可以延时1us并且将数据位移动到对应的位置
}
}2.读时序--CPU和DS18B20一起控制
总线控制器发起读时序时,DS18B20仅被用来传输数据给控制器。因此,总线控制器在发出读寄存器指令[BEh ]或读电源模式指令[B4h]后必须立刻开始读时序,以便DS18B20提供请求的数据。除此之外,总线控制器在发出发送 温度转换指令平[44h]或召回EEPROM指令[B8h]之后读时序,详见DS18B20功能指令节。
所有读时序必须最少60us,包括两个读周期间至少1us的恢复时间。当总线控制把数据线从高电平拉低到低电平时,读时序开始,数据线必须至少保持1us,然后总线被释放。在总线控制器发出读时序后,DS18B20读/写时隙时序图过拉高或拉低总线上来传输1或0。当传输0结束后,总线将被释放,通过上拉电阻回到高电平空闲状态。从DS18B20 输出的数据在读时序的下降沿出现后15us内有效。因此,总线控制器在读时序开始15us内释放总线然后采样总线状态, 以读取数据线的状态。【在0-15us之有效,其他时间没有干其他事情】
1.读“0”


2.读“1”

3.官方代码实现
unsigned char Ds18b20ReadByte()
{
unsigned char byte = 0, bi = 0;//bi:存储读出的bit
unsigned int i = 0, j = 0;
for (j=8; j>0; j--)
{
DATA = 0; //先将总线拉低1us
i++;//中间间隔1us,因为太小了,所以不能使用delay
DSPORT= 1; //然后释放总线
i++;
i++; //延时6us等待数据稳定
bi = DSPORT; //读取数据,从最低位开始读取
/*将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉那位补0。*/
byte = (byte >> 1) | (bi << 7);
//byte |= (bi << (8-j));//可以替代上面
delay45us();
}
return byte;
}5.DS18B20工作流程分析
1.温度获取过程
(1)DS18B20自己本身不会主动取进行温度测量,而是需要主控CPU主动发起一个温度转换的过程,这么设计是因为温度转换本身是要耗电的,所以设计位拼死待机等待温度转换命令后才取进行温度AD转换
(2)主控CPU和DS18B20之间的通信是分周期,比如我们要让DS18B20进行温度转换就是一个周期。这个周期包括=初始化+n个指令(每一个周期的开始都要有一个初始化,然后跟着n个命令)
(3)初始化过程主要是探测目标DS18B20是否存在(查看是否有响应),如存在将芯片初始化。
(4)命令很重要。(18B20中是存在CPU的)所以DS18B20是一个典型的“命令-响应”型外设。
(5)学习这种外设的关键是:命令集。
//开启温度转换
void Ds18b20ChangTemp(void)
{
Ds18b20Init();
delay1ms();
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0x44); //温度转换命令
delay750ms(); //等待转换成功,而如果你是一直刷着的话,就不用这个延时了
}
void Ds18b20ReadTempCom(void)
{
Ds18b20Init();
delay1ms();
Ds18b20WriteByte(0xcc); //跳过ROM操作命令
Ds18b20WriteByte(0xbe); //发送读取温度命令
}
//将读取到的温度输出
int Ds18b20ReadTemp(void)
{
unsigned int temp = 0;
unsigned char tmh, tml;
double t = 0;
Ds18b20ChangTemp(); //先写入转换命令
Ds18b20ReadTempCom(); //然后等待转换完后发送读取温度命令
tml = Ds18b20ReadByte(); //读取温度值共16位,先读低字节
tmh = Ds18b20ReadByte(); //再读高字节
temp = tmh;
temp <<= 8;
temp |= tml;
return temp ;
}2.ROM操作指令
(1)DS18B20支持多个芯片串联在一根总线上,也就是所谓的单总线协议,所以必须要主控CPU要能够区分总线上多个18B20,因此有个ROM操作指令来完成这个任务(区分多个1SD8B20)
(2)ROM操作指令和温度采集一点关系都没有,所以当我们总线上只有一个18B20的时候ROM操作指令我们不需要去管
(3)一旦系统中单总线上有多个18B20,那么我们必须借助ROM操作指令来区分多个18B20,而且这个区分过程可能需要多个ROM指令来完成。
(4)如果系统中只有一个18B20,那么就用一条skip rom命令(0xCC)就可以跳过这个阶段。【因为只有一个所以可以不用进行响应直接发送即可】


3.功能指令
(1)ROM操作指令目的是为了在单总线上多个18B20中挑选到那个当前我们要操作的18B20,而功能指令是为了和选定的18B20通信从而获取温度。



6.DS18B20的编程要点
1.几种工作思路
(1)参考文档自己编写
(2)参考示例代码移植
2.DS18B20移植注意点
(1)注意延时函数的本地实现---DS18B20对时间要求很高【代码里的时间有关的部分必须重写】
(2)注意引脚配置(看原理图)
(3)注意时序
(4)线通过初始化来检测芯片是否能通再做其他的
(5)注意读到的温度值是否会变
3.代码实践
1.移植初始化函数
//初始化函数
//返回0则表示初始化成功,1表示失败
unsigned char Ds18b20Init(void){
unsigned char i=0;
DQIO=0;//将数据总线拉低
Delay750us();//数据手册要求480us-900us
DQIO=1;//然后拉高总线,如果DS18B20做出翻译会将再15us-60us后总线拉低
//如果DS18B20接收到并且回应则DQIO=1,如果没有回应则DQIO=0
i=0;
while(DQIO){//ds18b20没有回应
i++;
if(i>5){//因为我们要求再15us-60us之间进行响应
//而且我们设置延迟函数为15us,则表示15us进行一次检验
//60/15=4次
return 1;
}
Delay15us();
}
return 0;//初始化成功
}2.移植串口函数作为调试
uart.c
#include "uart.h"
// 串口设置为: 波特率9600、数据位8、停止位1、奇偶校验无
// 使用的晶振是11.0592MHz的,注意12MHz和24MHz的不行
void uart_init(void)
{
// 波特率9600
SCON = 0x50; // 串口工作在模式1(8位串口)、允许接收
PCON = 0x00; // 波特率不加倍
// 通信波特率相关的设置
TMOD = 0x20; // 设置T1为模式2
TH1 = 253;
TL1 = 253; // 8位自动重装,意思就是TH1用完了之后下一个周期TL1会
// 自动重装到TH1去
TR1 = 1; // 开启T1让它开始工作
// ES = 1;
// EA = 1;
}
// 通过串口发送1个字节出去
void uart_send_byte(unsigned char c)
{
// 第1步,发送一个字节
SBUF = c;
// 第2步,先确认串口发送部分没有在忙
while (!TI);
// 第3步,软件复位TI标志位
TI = 0;
}
main.c
void main(){
unsigned char ret=0;
uart_init();
uart_send_byte('!');//串口测试成功
ret=Ds18b20Init();
if(ret==0){
uart_send_byte('K');//输出,则表示初始化成功
}else{
uart_send_byte('A');
}
while(1);
}10.DS18B20移植
1.写函数
//写函数
void Ds18b20_write_byte(unsigned char dat){
unsigned int i=0,j=0;
for(j=0;j<8;j++){
DQIO=0;//每写入一位数据之前先将总线拉低1us
i++;//延时效果
DQIO=dat&0x01;//写入一个数据,从最低位开始
Delay68us();//时序要求最少60us
DQIO=1;//然后释放总线,至少1us给总线恢复时间
dat>>=1;//将倒数第二位移动到倒数第一位
}
}2.读函数
//读函数
unsigned char Ds18b20_read_byte(){
unsigned char byte=0,bi=0;
unsigned int i=0,j=0;
for(j=8;j>0;j--){
DQIO=0;//先将总线低
i++;//延时1us
DQIO=1;//然后释放总线
//【注意点:这个地方的时间控制很重要,如果太长或者太短都可能读取不到数据
i++;
i++;//延时6us等待数据稳定
bi=DQIO;//读取数据,从最低位开始读取
//将byte左移一位,然后与上右移7位后的bi,注意移动之后移掉的那位补0【因为我们从最低位开始读取】
byte=(byte>>1) | (bi<<7);
Delay45us();
}3.转换温度
注意点:温度转换是需要时间的,所以在转换温度后记得要延时一定的时间才可以(750ms)
void Ds18b20ChangeTemp(void){
Ds18b20Init();
Delay1ms();
Ds18b20_read_byte(0xcc);//跳过ROM操作命令
Ds18b20_read_byte(0x44);//温度转换命令
//因为我们转换温度需要时间才可以进行读取,所以我们需要时间等待
//温度转换过程要750ms
Delay750ms();//等待转换成功,而如果你是一直刷着,就不用延时
}4.读取温度
void Ds18b20ReadTemp(void){
Ds18b20Init();
Delay1ms();
Ds18b20_read_byte(0xcc);//跳过ROM操作命令
Ds18b20_read_byte(0xbe);//发送读取温度命令
}5.将读取到的温度合并
//将寄存器中(包括读取到)的温度(2位)合并成一位
//但是如果这样写不方便在主函数调用
//因为16位,用int无法输出,则我们使用串口直接输出
/*
unsigned int Ds18b20ReadTemp(void){
unsigned int temp=0;//合并结果
unsigned char tmh,tml;//高8位与低8位
Ds18b20ChangeTemp();//先写入转换命令
Ds18b20ReadTempCom();//然后等待转换完发送读取温度命令
//读取温度一共12位(但是实际上显示16位)
tml=Ds18b20ReadByte();//先读取温度的低8位
tmh=Ds18b20ReadByte();//再读温度的高8位
//将结果合并
//(tmh<<8):因为高位是在合并结果的bit8,所以将tmh左移8位
temp=tml | (tmh<<8);
return temp;
}
*/
void Ds18b20ReadTemp(void){
unsigned int temp=0;//合并结果
unsigned char tmh,tml;//高8位与低8位
Ds18b20ChangeTemp();//先写入转换命令
Ds18b20ReadTempCom();//然后等待转换完发送读取温度命令
//读取温度一共12位(但是实际上显示16位)
tml=Ds18b20ReadByte();//先读取温度的低8位
tmh=Ds18b20ReadByte();//再读温度的高8位
uart_send_byte(0);
uart_send_byte(tml);
uart_send_byte(tmh);//前面四位为0
}主函数
#include"ds18b20.h"
#include"uart.h"
void main(){
/*
unsigned char ret=0;
uart_init();
//uart_send_byte('!');//串口测试成功
ret=Ds18b20Init();
if(ret==0){
uart_send_byte('K');//输出,则表示初始化成功
}else{
uart_send_byte('A');
}
*/
while(1){
Ds18b20ReadTemp();
}
}6.温度数据的移位组合

7.数字值转为温度值

换算:tml :0x99 tmh:0x01,意味着,温度数字值:0x199,换算成十进制为:409
当前默认精度是12位,每一个数字值对应的应该是0.0625摄氏度
所以计算出来的温度值应该是:409*0.0625=25.56摄氏度
在单片机中,应该尽量避免进行小数运算。小数运算一般转换成整数运算。
409*0.0625=409*625/10000
注意点:
(1)12位对应的是0.0625,可能会溢出
temp=temp*625/10000;//此处产生溢出文章来源:https://www.toymoban.com/news/detail-762750.html
(2)强制类型转换文章来源地址https://www.toymoban.com/news/detail-762750.html
//将数值转换为温度值
void Ds18b20ReadTemp2(void){
unsigned int temp=0;//合并结果
unsigned int tmh,tml;//高8位与低8位
//因为我们要进行温度转换,所以0.0625是double
double t=0;
Ds18b20ChangeTemp();//先写入转换命令
Ds18b20ReadTempCom();//然后等待转换完发送读取温度命令
//读取温度一共12位(但是实际上显示16位)
tml=Ds18b20ReadByte();//先读取温度的低8位
tmh=Ds18b20ReadByte();//再读温度的高8位
//将结果合并
//(tmh<<8):因为高位是在合并结果的bit8,所以将tmh左移8位
temp=tml | (tmh<<8);
//temp=temp*625/10000;//此处产生溢出
t=temp*0.0625;
uart_send_byte(0);
//uart_send_byte(temp);
uart_send_byte((unsigned char)t);//因为t是double,所以要进行强制类型转换
}到了这里,关于【单片机】17-温度传感器DS18B20的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!