目录——三相永磁同步电机的数学建模
Clark变换与仿真建模
Park变换与仿真建模
同步旋转坐标系下的数学建模
静止坐标系下的数学建模编辑
Matlab自带三相PMSM的仿真模块设置
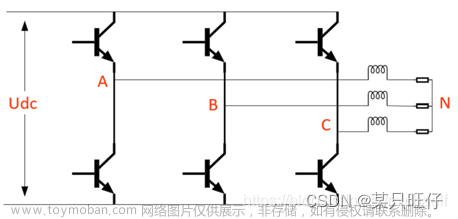
三相永磁同步电机是一个复杂的非线性系统,为了更好的设计先进的PMSM控制算法,因此需要建立适合的数学模型,常用坐标系变换为静止坐标系Clark和同步旋转坐标系Park变换。
按照三相PMSM永磁体转子的空间结构不同,三相PMSM转子结构分为表贴式和内置式。表贴式转子结构,制造成本低、结构简单、转动惯量小,主要应用于恒功率运行范围不宽的三相PMSM和BLDCM之中,其永磁磁极易于实现最优设计,使电机的气隙磁密波形趋于正弦波;内置式转子结构则利用转子磁路不对称产生的磁阻转矩,提高电机的功率密度,但内置式漏磁系数和制造成本都比较大。
由在自然坐标系下PMSM的三相电压方程、磁链方程、电磁转矩方程、机械运动方程,得出在自然坐标系下三相PMSM的基本数学模型,由于其数学模型较为复杂,故需要合适的坐标变换对模型进行降阶和解耦。常用的坐标变换为静止坐标变换(Clark变换)和同步旋转坐标变换(Park变换)

Clark变换与仿真建模
将自然坐标系ABC变换到静止坐标系a-b的坐标变换成为Clark变换,将ABC轴分别投影到ab轴得到Clark坐标变换公式:

将静止坐标系ab变换到自然坐标系ABC的坐标变换称为反Clark变换,对T3S/2S取逆矩阵可得反Clark坐标变换公式:


其中,当根据幅值不变作为约束条件时,矩阵前系数为2/3;当根据功率不变作为约束条件时,矩阵前系数为2/3取根号。
Clark变换与反Clark变换仿真建模如下:


设置自然坐标系下三相正弦波ABC峰值为100,频率为2*50*pi,采样时间为10e-6,BC与A参数设置相同,B滞后A120°,C超前A120°,步长为0.2,得到波形,显然a超前b90°

同理,对反Clark变换仿真搭建:



Park变换与仿真建模
将静止坐标系下ab变换到同步旋转坐标系dq的坐标变换称为Park变换,同理,将同步旋转坐标系dq变换到静止坐标系下ab称为反Park变换


将自然坐标系ABC变换到同步旋转坐标系dq,将同步旋转坐标系dq变换到自然坐标系ABC,得到T3s/2r和T2r/3s

仿真建模:
Park与反Park变换建模仿真与波形

波形


将原自然坐标系下A相波形,与反Park变换后的A波形进行对比,发现波形相同

将自然坐标系ABC变换到同步旋转坐标系dq 将同步旋转坐标系dq变换到自然坐标系ABC的仿真建模

波形:


注:
Matlab自身使用的坐标变换矩阵比书本上介绍的变换矩阵差90°电角度,当选择Aligned axis时为书本中所用坐标系,选择90 degrees为Matlab所用坐标系

同时Matlab自身带有坐标变换模块
同步旋转坐标系下的数学建模
通常使用同步旋转坐标系dq下的数学模型,由定子电压方程可将三相PMSM数学模型进行解耦,

可在同步旋转坐标系下对三相PMSM进行仿真建模
电磁转矩计算

dq轴电流计算

机械角速度计算

静止坐标系下的数学建模
Matlab自带三相PMSM的仿真模块设置

包含三个部分Configuration(配置)、Parameters(参数设置)、Advanced(高级设置)
Configuration(配置):包含相数(3相、5相)、反电动势波形(正弦波和梯形波)、转子类型(凸极性、圆柱形)、机械输入方式(负载转矩、机械角速度)、电机类型

Parameters(参数设置):包含定子电阻Ω、定子电感H、机械常值(永磁体磁链(Wb)、电压常数(V/krpm)、转矩常数(N·m))、转动惯量、极对数、阻尼系数

Advanced(高级设置):包含采样时间和同步旋转坐标系设置文章来源:https://www.toymoban.com/news/detail-762758.html
 文章来源地址https://www.toymoban.com/news/detail-762758.html
文章来源地址https://www.toymoban.com/news/detail-762758.html
到了这里,关于《现代永磁同步电机控制原理及MATLAB仿真》第一章·三相永磁同步电机的数学建模的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!





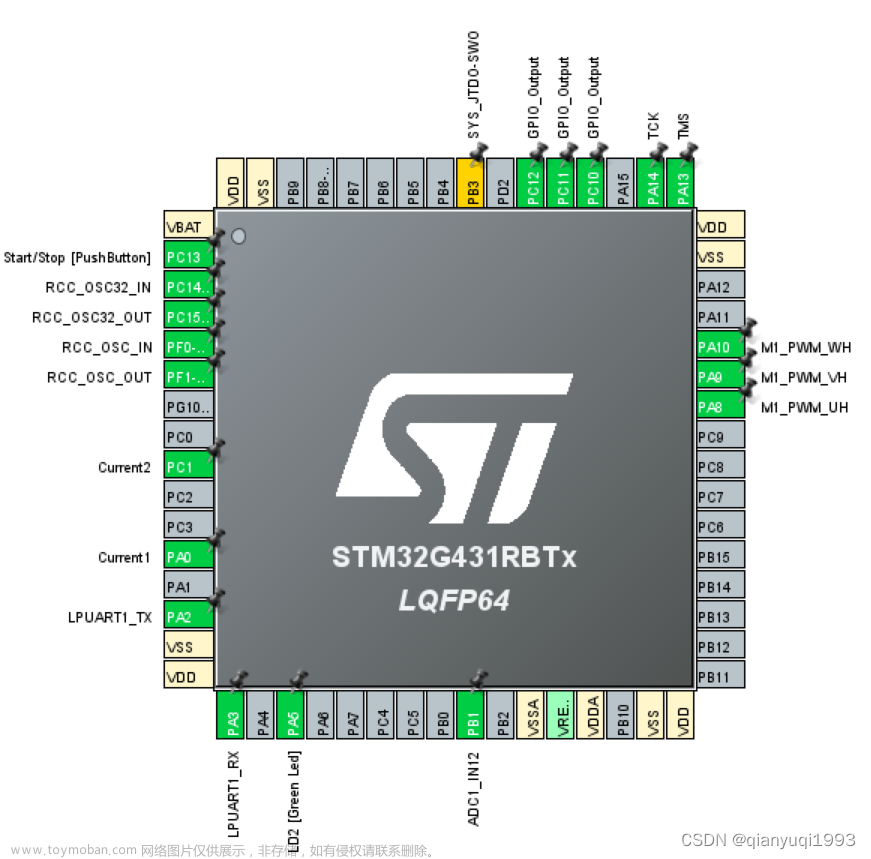
![[FOC-Simulink]使用Simulink代码生成工具基于STM32开发板对永磁同步电机进行开环控制](https://imgs.yssmx.com/Uploads/2024/02/648307-1.png)



