目录
一 串口介绍
1.常用函数介绍
串口发送/接收函数:
串口中断回调函数:
状态标记变量:
2.串口接收中断流程编辑
3.串口实验(非中断)
编程实现:
4.串口实验(中断)
编程实现:
二 蓝牙
非中断
中断
连接蓝牙模块
三 Wifi
1.Wifi模块基本接收和使用
2.WiFi连接服务器
3.Wifi服务器
四 4G
一 串口介绍
参考51系列文章:
(54条消息) C51:串口_我有在好好学习的博客-CSDN博客
(54条消息) C51:蓝牙/Wifi/4G 无线控制开关_c51蓝牙_我有在好好学习的博客-CSDN博客
1.常用函数介绍
串口发送/接收函数:
HAL_UART_Transmit(); 串口发送数据,使用超时管理机制
HAL_UART_Receive(); 串口接收数据,使用超时管理机制
HAL_UART_Transmit_IT(); 串口中断模式发送
HAL_UART_Receive_IT(); 串口中断模式接收
HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart,uint8_t *pData, uint16_t Size, uint32_t Timeout)作用:以阻塞的方式发送指定字节的数据
形参 1 :UART_HandleTypeDef 结构体类型指针变量
形参 2:指向要发送的数据地址
形参 3:要发送的数据大小,以字节为单位
形参 4:设置的超时时间,以ms单位
HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart,uint8_t *pData, uint16_t Size)作用:以中断的方式接收指定字节的数据
形参 1 是 UART_HandleTypeDef 结构体类型指针变量
形参 2 是指向接收数据缓冲区
形参 3 是要接收的数据大小,以字节为单位
此函数执行完后将清除中断,需要再次调用以重新开启中断。
串口中断回调函数:
HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //串口中断处理函数
HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //发送中断回调函数
HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //接收中断回调函数
状态标记变量:
USART_RX_STA
从0开始,串口中断接收到一个数据(一个字节)就自增1。当数据读取全部OK时候(回车和换行符号来的时候),那么 USART_RX_STA的最高位置1,表示串口数据接收全部完毕了,然后main函数里面可以处理数据了。

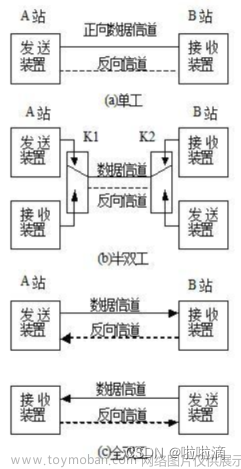
2.串口接收中断流程
3.串口实验(非中断)
需求:
接受串口工具发送的字符串,并将其发送回串口工具。
硬件接线:
TX -- A10
RX -- A9
一定要记得交叉接线!!
串口配置:
1. 选定串口

2. 选择模式
异步通讯

3. 串口配置

4. 使用MicroLIB库
从魔术棒打开,这个勾勾一定要打上,否则 printf 无法重映射!

编程实现:
重写了printf
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include <string.h>
/* USER CODE END Includes */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
//=============================================================================
/* USER CODE BEGIN 1 */
uint8_t str[] = "hello world\r\n";
uint8_t ch[21];
memset(ch,'\0',21);
/* USER CODE END 1 */
/* USER CODE BEGIN 2 */
HAL_UART_Transmit(&huart1,str,strlen(str),100); //串口发送数据,使用超时管理机制
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_UART_Receive(&huart1,ch,20,100);//串口接收数据,使用超时管理机制
//HAL_UART_Transmit(&huart1,str1,strlen(str1),100); //串口发送数据,使用超时管理机制
printf(ch);
memset(ch,'\0',21);
}
/* USER CODE END 3 */
4.串口实验(中断)
需求:
通过中断的方法接受串口工具发送的字符串,并将其发送回串口工具。
硬件接线:
同上
串口配置:
前4步同上
5. 打开中断

编程实现:
覆写函数的模板:直接复制粘贴
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
/* USER CODE END PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
//=================================================
/* USER CODE BEGIN 2 */
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
if(UART1_RX_STA & 0x8000)
{
printf("收到数据:");
// 将收到的数据发送到串口
HAL_UART_Transmit(&huart1, UART1_RX_Buffer, UART1_RX_STA & 0x3fff, 0xffff);
// 等待发送完成
while(huart1.gState != HAL_UART_STATE_READY);
printf("\r\n");
// 重新开始下一次接收
UART1_RX_STA = 0;
}
printf("=====\r\n");
HAL_Delay(1000);
}
/* USER CODE END 3 */二 蓝牙
非中断
点亮板载LED,判断接收的数据是否为“open”"close",如果不是就提示输入错误,先用串口调试,再上蓝牙模块。

/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
/* USER CODE END Includes */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
//=============================================================================
/* USER CODE BEGIN 2 */
HAL_UART_Transmit(&huart1,(uint8_t *)"uart_start\r\n",strlen("uart_start\r\n"),100); //串口发送数据,使用超时管理机制
/* USER CODE END 2 */
/* USER CODE BEGIN 3 */
HAL_UART_Receive(&huart1, ch, 19, 100);
//HAL_UART_Transmit(&huart1, ch, strlen(ch), 100);
//printf((char *)ch);
printf("%s", ch);
if (!strcmp((const char *)ch, "open")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET)
printf("LED1已打开\r\n");
}else if(!strcmp((const char *)ch, "close")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET)
printf("LED1已关闭\r\n");
} else {
if(ch[0] != '\0')
printf("指令发送错误:%s\r\n", ch);
}
memset(ch, 0, strlen((const char *)ch));
}
/* USER CODE END 3 */
中断

/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
/* USER CODE END PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
/* USER CODE END 0 */
//=====================================================================================
/* USER CODE BEGIN 2 */
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
//启动提示
HAL_UART_Transmit(&huart1,(uint8_t *)"uart_start\r\n",strlen("uart_start\r\n"),100);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
if(UART1_RX_STA & 0x8000)
{
printf("收到数据:");
if (!strcmp((const char *)UART1_RX_Buffer, "open")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET)
printf("LED1已打开\r\n");
}else if(!strcmp((const char *)UART1_RX_Buffer, "close")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET)
printf("LED1已关闭\r\n");
} else {
if(UART1_RX_Buffer[0] != '\0')
printf("指令发送错误:%s\r\n", UART1_RX_Buffer);
}
memset(UART1_RX_Buffer, 0, strlen((const char *)UART1_RX_Buffer));
// 重新开始下一次接收
UART1_RX_STA = 0;
}
HAL_Delay(200);
}
/* USER CODE END 3 */
}
连接蓝牙模块
模块波特率为9600
所以修改串口波特率

再连接模块即可使用。

三 Wifi
1.Wifi模块基本接收和使用
参考之前的文章
(55条消息) C51:蓝牙/Wifi/4G 无线控制开关_c51蓝牙_我有在好好学习的博客-CSDN博客文章来源地址https://www.toymoban.com/news/detail-764316.html
2.WiFi连接服务器

在接收中断处理中加入一个是否接收到OK的判断,改变标志位AT_OK_FLAG,用这个标志位卡住联网过程,收到OK再继续发下一个AT指令。
联网完成后,服务器端会收到你设置的心跳包。并且开始进行灯控指令的接收判断。
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
/* USER CODE END Includes */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//AT指令
char connecct_wifi[] = "AT+CWJAP=\"iQOO 5\",\"88888888\"\r\n";
char connect_server[] = "AT+CIPSTART=\"TCP\",\"192.168.138.144\",8880\r\n";
char CIPMODE[] = "AT+CIPMODE=1\r\n";
char CIPSEND[] = "AT+CIPSEND\r\n";
//是否收到OK标志位,是否收到error标志位,联网状态标志位
uint8_t AT_OK_FLAG = 0;
uint8_t ERROR_FLAG = 0;
uint8_t NET_OK_FLAG = 0;
/* USER CODE END PD */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
/* USER CODE END PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
//=================================
//判断是否是已经连上服务器,
//如果没有,判断有没有收到AT指令返回的OK,ERROR
if(!NET_OK_FLAG)
{
if(!strcmp((const char *)UART1_RX_Buffer, "OK"))
AT_OK_FLAG = 1;
if(!strcmp((const char *)UART1_RX_Buffer, "ERROR"))
{
ERROR_FLAG = 1;
//收到ERROR,闪灯
for(i = 0;i<10;i++)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9);
HAL_Delay(200);
}
}
}
//=================================
//如果已经连上服务器,进行灯控指令部分判断
else
{
if (!strcmp((const char *)UART1_RX_Buffer, "open")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET)
printf("LED1已打开\r\n");
}else if(!strcmp((const char *)UART1_RX_Buffer, "close")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET)
printf("LED1已关闭\r\n");
} else {
if(UART1_RX_Buffer[0] != '\0')
printf("指令发送错误:%s\r\n", UART1_RX_Buffer);
}
}
//=================================
//判断结束,清空接收信息
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
// 重新开始下一次接收
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart2,temp,1,0xffff);//发送给串口2
return ch;
}
//===================================main===========================================
/* USER CODE END 0 */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
//启动提示
printf("uart_start\r\n");
//============联网部分代码=============
//给上电时间
HAL_Delay(2000);
//如果下面收到ERROR,从这里重新开始
retry:
//先清0
ERROR_FLAG = 0;
//开始联网提示
printf("begin connection\r\n");
//发送第1个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)connecct_wifi,strlen(connecct_wifi),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("Wifi ON\r\n");
//发送第2个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)connect_server,strlen(connect_server),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("Server ON\r\n");
//发送第3个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)CIPMODE,strlen(CIPMODE),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("CIPMODE ON\r\n");
//发送第4个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)CIPSEND,strlen(CIPSEND),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("CIPSEND ON\r\n");
//联网完成改变标志位
NET_OK_FLAG = 1;
//联网完成亮起指示灯
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
printf("NET OK\r\n");
/* USER CODE END 2 */
//===============================================================================
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
//心跳包
HAL_UART_Transmit(&huart1,(uint8_t *)"stm32\r\n",strlen("stm32\r\n"),100);
HAL_Delay(1000);
}
/* USER CODE END 3 */
3.Wifi服务器
原理相同,基本上改变一些AT指令就可以了。
但是要注意,主机模式下收到的字符串形式如下
发送“ op ” ,实际上接收的结果为“ +IPD,0,2:op ”

直接用strcmp()没法判断,所以做了一个小字符串buffer,用来获取 “ : ” 后的内容
然后判断buffer的内容即可
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
/* USER CODE END Includes */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//AT指令
//1 配置成双模
uint8_t CWMODE[] = "AT+CWMODE=2\r\n";
//2 使能多链接
uint8_t CIPMUX[] = "AT+CIPMUX=1\r\n";
//3 建立TCPServer
uint8_t CIPSERVER[] = "AT+CIPSERVER=1\r\n";// default port = 333
//4 发送数据
uint8_t CIPSEND[] = "AT+CIPSEND=0,8\r\n";// 发送8个字节在连接0通道上
//是否收到OK标志位,是否收到error标志位,联网状态标志位
uint8_t AT_OK_FLAG = 0;
uint8_t ERROR_FLAG = 0;
uint8_t NET_OK_FLAG = 0;
uint8_t i,j;//for用
uint8_t buffer[8];//接收开灯指令
uint8_t message_mark = 0;//判断是否是来自客户端的指令
/* USER CODE END PD */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
/* USER CODE END PV */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
//=================================
//判断是否是已经连上服务器,
//如果没有,判断有没有收到AT指令返回的OK,ERROR
if(!NET_OK_FLAG)
{
if(!strcmp((const char *)UART1_RX_Buffer, "OK"))
AT_OK_FLAG = 1;
if(!strcmp((const char *)UART1_RX_Buffer, "ERROR"))
{
ERROR_FLAG = 1;
//收到ERROR,闪灯
for(i = 0;i<10;i++)
{
HAL_GPIO_TogglePin(GPIOB, GPIO_PIN_9);
HAL_Delay(200);
}
}
}
//=================================
//如果已经连上服务器,进行灯控指令部分判断
else
{
//判断是否是来自客户端的信息,如果是就接收它
for(i = 0;i < UART1_REC_LEN;i++){
if(UART1_RX_Buffer[i] == ':' || message_mark){
if(UART1_RX_Buffer[i] == ':') i++;
message_mark = 1;
buffer[j] = UART1_RX_Buffer[i];
j++;
if(j >= 8) break;
}
}
message_mark = 0;
j = 0;
//根据来自客户端的信息判断开不开灯
if (!strcmp((const char *)buffer, "open")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_RESET)
printf("LED1已打开\r\n");
memset(buffer, 0, 8);
}else if(!strcmp((const char *)buffer, "close")) {
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_8) == GPIO_PIN_SET)
printf("LED1已关闭\r\n");
memset(buffer, 0, 8);
}
}
//=================================
//判断结束,清空接收信息
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
// 重新开始下一次接收
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
//覆写printf
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart2,temp,1,0xffff);//发送给串口2
return ch;
}
/* USER CODE END 0 */
//==================================main====================================
/* USER CODE BEGIN 2 */
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
//启动提示
printf("uart_start\r\n");
//=================================
//给上电时间
HAL_Delay(2000);
//如果下面收到ERROR,从这里重新开始
retry:
//先清0
ERROR_FLAG = 0;
//开始联网提示
printf("begin connection\r\n");
//发送第1个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)CWMODE,strlen((const char *)CWMODE),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("Wifi ON\r\n");
//发送第2个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)CIPMUX,strlen((const char *)CIPMUX),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("Server ON\r\n");
//发送第3个AT指令===========================
HAL_UART_Transmit(&huart1,(uint8_t *)CIPSERVER,strlen((const char *)CIPSERVER),100);
//如果收到OK,再继续
while(!AT_OK_FLAG)
{
//判断是否已经ERR,如果ERR,重新开始联网
if(ERROR_FLAG) goto retry;
HAL_Delay(50);
}
AT_OK_FLAG = 0;
printf("CIPMODE ON\r\n");
//联网完成改变标志位
NET_OK_FLAG = 1;
//联网完成亮起指示灯
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_9, GPIO_PIN_RESET);
printf("server OK\r\n");
/* USER CODE END 2 */
//==========================================
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
//心跳包
HAL_UART_Transmit(&huart1,(uint8_t *)CIPSEND,strlen((const char *)CIPSEND),100);
HAL_Delay(2000);
HAL_UART_Transmit(&huart1,(uint8_t *)"stm32f1.",strlen("stm32f1."),100);
HAL_Delay(2000);
}
/* USER CODE END 3 */
四 4G
和WIFI模块一样的操作,而且更加简单,修改对应的AT指令即可,主机搞个内网穿透。
具体参考之前的文章,轻松愉快,不写出来了。文章来源:https://www.toymoban.com/news/detail-764316.html
(55条消息) C51:蓝牙/Wifi/4G 无线控制开关_c51蓝牙_我有在好好学习的博客-CSDN博客
到了这里,关于STM32:串口(蓝牙/WIFI/4G)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!

![[嵌入式软件][启蒙篇][仿真平台] STM32F103实现串口输出输入、ADC采集](https://imgs.yssmx.com/Uploads/2024/01/814721-1.gif)