问题描述:图像坐标系如何转换到相机坐标系。
问题解答:
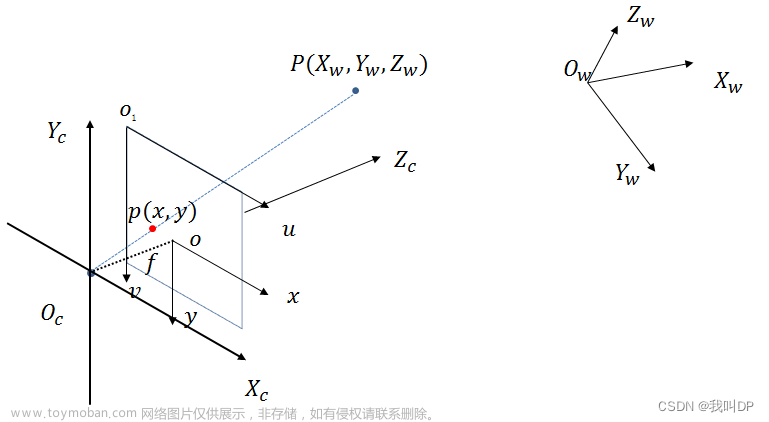
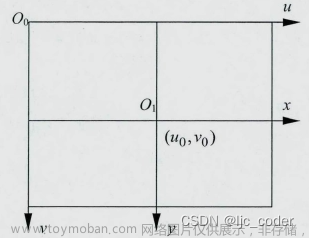
图像坐标系的定义:图像坐标系是用于描述数字图像中像素位置的坐标系。图像坐标系的原点是相机光轴与成像平面的交点。X轴沿着成像平面的水平方向正向,Y轴沿着成像平面的垂直方向正向。
相机坐标系的定义:相机坐标系是用于描述相机几何关系的坐标系。它通常是一个右手坐标系,其中相机的镜头位置是原点,相机的光轴是Z轴,X轴和Y轴与图像平面垂直,构成一个三维坐标系。
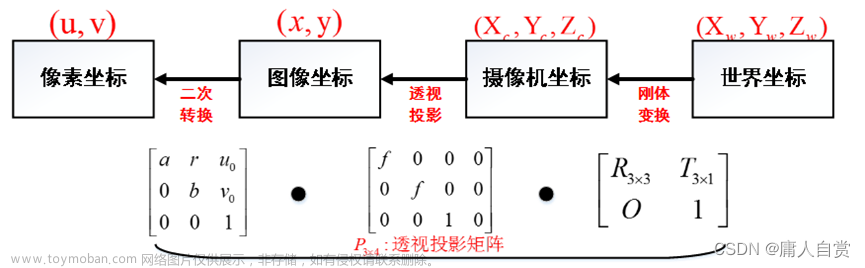
注意:图像坐标系、像素坐标系都是二维坐标系,而相机坐标系是三维坐标系。
图像坐标系、像素坐标系的单位是像素,而相机坐标系的单位是毫米。
如下图示:

图像坐标系和相机坐标系之间是通过相似三角形进行建立关系的。🔺O'OP'相似于🔺HOP。这里物体在相机坐标系中的坐标是(X,Y,Z),物体在图像坐标系中的坐标是(X' , Y' )。
因此,这里的f是焦距。

可以求得。
 文章来源:https://www.toymoban.com/news/detail-764628.html
文章来源:https://www.toymoban.com/news/detail-764628.html
这样就建立起了图像坐标系和图像坐标系的联系。文章来源地址https://www.toymoban.com/news/detail-764628.html
到了这里,关于图像坐标系如何转换到相机坐标系。的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!