引言:
在数字化时代,深度学习如一颗耀眼的明星,将人工智能推向新的高峰。本文将深度剖析自动驾驶沙盘与人工智能专业的紧密结合,旨在揭示这一融合对于中职和高职类人工智能专业的学子们的巨大意义。通过以图像识别技术为入口,我们将探讨自动驾驶沙盘在培养学生创新思维和实际应用能力方面的独特价值。

第一章:自动驾驶沙盘的崭新世界
1.1 自动驾驶沙盘的概述
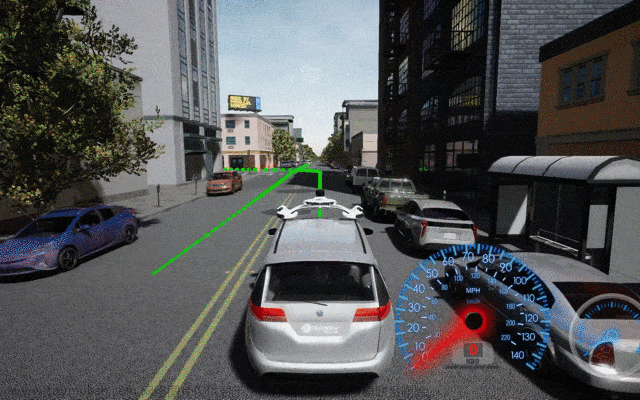
自动驾驶沙盘,是一块模拟城市地图的多维交互式学术平台。小车搭载着激光雷达、摄像头、IMU等传感器,不仅是一辆能够行驶的机械体,更是一个融合了图像识别、深度学习和自动驾驶技术的综合实验平台。
1.2 深度学习的崭新时代
深度学习是机器学习的分支,它模仿人脑神经网络的结构和功能,通过大量数据训练模型,实现高度智能化的学习和决策过程。这一技术的迅猛发展将引领人工智能进入一个崭新的时代,而自动驾驶沙盘则成为了这一时代的扬帆起航的起点。

第二章:图像识别的奥妙探究
2.1 ros-darknet:深度学习与ROS的完美结合
为了深入了解图像识别的奥妙,我们选择了ros-darknet作为我们的工具。ros-darknet结合了ROS的强大功能和Darknet深度学习框架的优势,为我们提供了一个高效的图像识别解决方案。
2.2 代码实践:从图像到信息
# 引入所需库
import rospy
from sensor_msgs.msg import Image
from darknet_ros_msgs.msg import BoundingBoxes
# 回调函数,处理识别结果
def callback(data):
for box in data.bounding_boxes:
print("物体: {}, 置信度: {}".format(box.Class, box.probability))
# 初始化ROS节点
rospy.init_node('image_subscriber', anonymous=True)
# 订阅图像话题
rospy.Subscriber("/darknet_ros/bounding_boxes", BoundingBoxes, callback)
# 防止Python退出
rospy.spin()
通过这个简单的示例,我们能够轻松地获取到图像识别的结果,为人工智能专业的学生提供了一个实践场景。
第三章:人工智能专业的教学创新
3.1 实践操作与理论知识的融合
自动驾驶沙盘为人工智能专业的学生提供了一个理论知识与实际项目相结合的理想场景。学生们将通过实际操控,了解图像识别技术在自动驾驶中的具体应用,将理论知识与实际项目相结合。
3.2 实验室建设:理论授课的延伸
自动驾驶沙盘不仅存在于教室中,更是实验室建设的一部分。学生们将通过实际操控,了解图像识别技术在自动驾驶中的具体应用,将理论知识与实际项目相结合。
这里使用一个简化的模型,模型的训练和实际使用需要更多的数据和调整。
import cv2
# 模拟一个简单的红绿灯检测模型
def detect_traffic_light(image):
# 这里仅仅是一个示例,实际情况中需要训练更复杂的模型
# 使用OpenCV检测红色和绿色
hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)
lower_red = np.array([0, 100, 100])
upper_red = np.array([10, 255, 255])
mask_red = cv2.inRange(hsv, lower_red, upper_red)
lower_green = np.array([40, 40, 40])
upper_green = np.array([80, 255, 255])
mask_green = cv2.inRange(hsv, lower_green, upper_green)
if cv2.countNonZero(mask_red) > cv2.countNonZero(mask_green):
return "红灯"
else:
return "绿灯"
# 读取图像
image = cv2.imread("traffic_light_image.jpg")
# 调用红绿灯检测函数
result = detect_traffic_light(image)
# 输出结果
print(result)文章来源地址https://www.toymoban.com/news/detail-767272.html
第四章:深度学习的理论与应用
4.1 深度学习的基本原理
深度学习的核心思想是模仿人脑神经网络的结构和功能,通过多层次的神经元网络进行信息的传递和处理。在图像识别领域,深度学习通过大量的图像数据训练模型,使其能够准确识别图像中的物体。
4.2 卷积神经网络(CNN)
卷积神经网络是深度学习中常用于图像处理的一种神经网络结构。它通过卷积层、池化层和全连接层等组件,能够有效地提取图像的特征,是图像识别领域的重要算法。
4.3 图像识别算法在自动驾驶中的应用
在自动驾驶沙盘中,图像识别算法扮演着重要的角色。通过对摄像头获取的实时图像进行分析,系统能够识别道路标志、红绿灯、行人等物体,为自动驾驶决策提供重要的信息。
车道线检测通常使用边缘检测和霍夫变换等技术。
import cv2
import numpy as np
# 读取图像
image = cv2.imread("lane_image.jpg")
# 灰度化
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 高斯模糊
blur = cv2.GaussianBlur(gray, (5, 5), 0)
# 边缘检测
edges = cv2.Canny(blur, 50, 150)
# 霍夫变换
lines = cv2.HoughLinesP(edges, 1, np.pi / 180, threshold=50, minLineLength=100, maxLineGap=50)
# 绘制检测到的线段
for line in lines:
x1, y1, x2, y2 = line[0]
cv2.line(image, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 显示结果
cv2.imshow("Lane Detection", image)
cv2.waitKey(0)
cv2.destroyAllWindows()
第五章:小车技术与图像识别的完美结合
5.1 小车传感器的工作原理
自动驾驶小车搭载了激光雷达、摄像头、IMU等多种传感器。激光雷达负责获取周围环境的三维信息,摄像头则用于图像识别,而IMU则用于测量小车的加速度和角速度。
5.2 多传感器融合定位技术
为了更准确地获取小车的位置信息,自动驾驶小车采用了多传感器融合定位技术。通过将激光雷达、摄像头等传感器的数据进行融合,系统能够更精准地定位小车在地图中的位置。
5.3 自动驾驶决策与图像识别的协同
自动驾驶沙盘上的小车不仅能够识别周围环境的物体,还能够基于这些信息做出相应的决策。比如,在识别到红灯时,小车会停下;在识别到行人时,小车会采取避让动作。这种协同是图像识别与自动驾驶决策的完美结合。
第六章:从教育到创新,人工智能专业的未来之路
6.1 人工智能专业的培养目标
人工智能专业的培养目标不仅仅是培养学生对于深度学习等技术的掌握,更是培养他们在实际场景中应用这些技术解决问题的能力。自动驾驶沙盘作为实践平台,为学生提供了一个理想的培养场景。
6.2 创新思维的培养
自动驾驶沙盘的引入使得人工智能专业的学生能够从理论知识中走向实际操作,培养创新思维。通过实际项目的操控,学生们将理论知识转化为实际的解决方案,从而培养出具有创新意识的人才。
6.3 未来发展方向:自动驾驶与人工智能的融合
随着自动驾驶技术的不断发展,与人工智能的融合将成为未来的发展方向。人工智能专业的学生将能够在这一领域找到更广阔的发展空间,成为推动未来交通智能化的重要力量。
结语:开启智能交通的未来之门
自动驾驶沙盘与人工智能专业的紧密结合,既是对人工智能专业学生理论知识的深度挖掘,也是对实际应用能力的全面培养。这一融合不仅仅是一次实践,更是对未来智能交通发展的预见。在未来深度学习之路上,自动驾驶沙盘将引领着人工智能专业学子开启智能交通的未来之门。
文章来源:https://www.toymoban.com/news/detail-767272.html
到了这里,关于深度学习之路:自动驾驶沙盘与人工智能专业的完美融合的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!