基于Matlab开发的动态机器人轨迹仿真
近年来,机器人技术的发展已经进入了高速发展时期。控制与仿真技术作为机器人领域中至关重要的一环,也随之发展壮大。而在动态机器人轨迹仿真方面,Matlab作为一款具备强大数学计算能力的软件,在该领域中得到广泛应用。
本文将通过Matlab开发一个简单的机器人动态轨迹仿真程序,以便更好的理解和掌握这一技术。
一、动态机器人轨迹仿真的基本概念
动态机器人轨迹仿真是模拟机器人在不同的场景下的运动轨迹。如何实现机器人的运动模拟,即如何确定机器人的运动规律与运动学参数是动态轨迹仿真的核心问题。
在动态机器人轨迹仿真中,最常用到的方法是使用Matlab编写程序进行数值计算,并使用图形界面模拟机器人运动的过程。因此,Matlab成为了当今动态机器人轨迹仿真的首选软件。
二、动态机器人轨迹仿真的基本流程
1.确定机器人的模型及其运动规律:根据机器人的实际情况,选择适当的模型并确定机器人的运动规律。如何进行数学建模是动态机器人轨迹仿真的关键所在。
2.编写仿真程序:使用Matlab编写仿真程序,将机器人的运动规律用数学公式表示出来,并给出相应的初值。
3.运行仿真程序:在Matlab界面中输入相应的命令,运行编写好的仿真程序,以得到机器人的运动轨迹。
4.数据处理与结果显示:得到机器人的运动轨迹后,可以对其进行数据处理与结果显示。如画图、计算轨迹误差等。
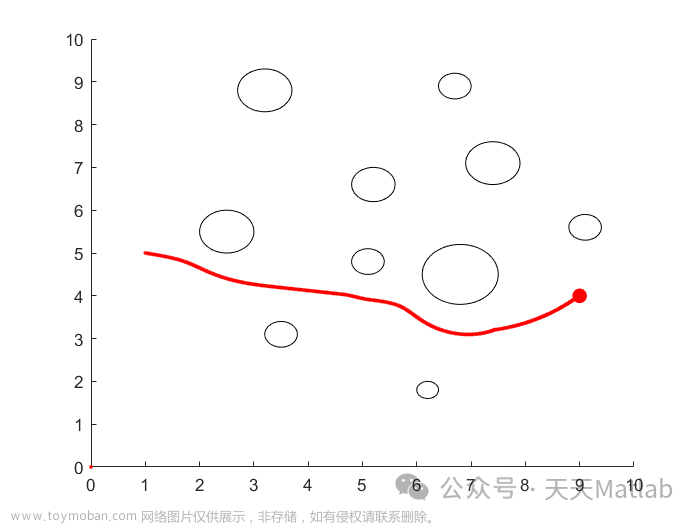
三、动态机器人轨迹仿真的案例程序
下面,我们将通过一个简单的案例程序,演示如何利用Matlab实现动态机器人轨迹的仿真。文章来源:https://www.toymoban.com/news/detail-768246.html
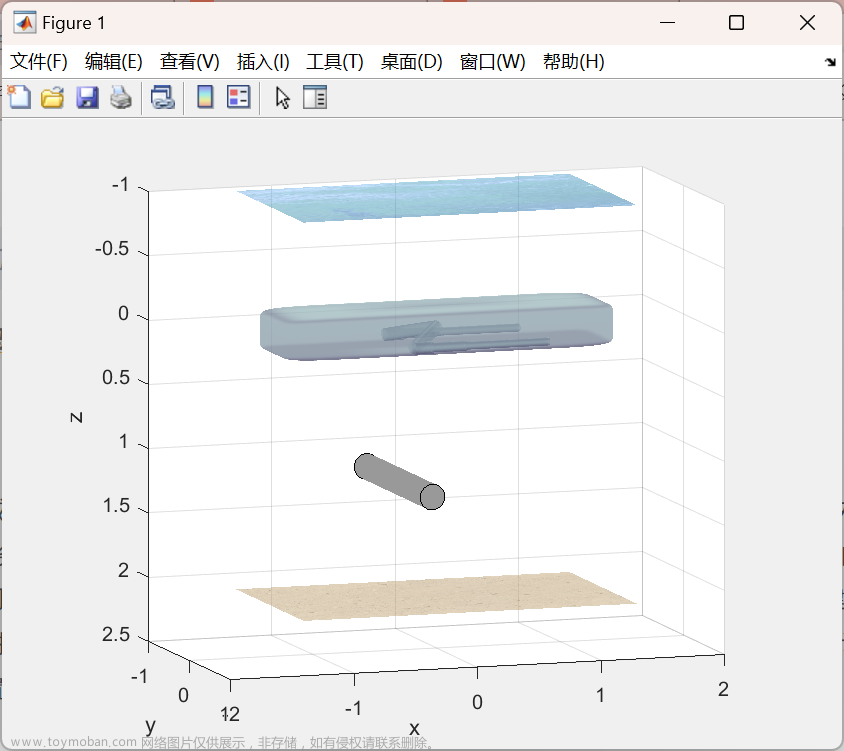
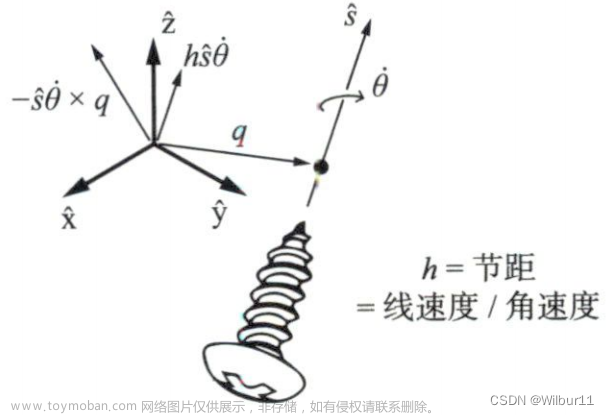
假设我们要开发一个能够模拟机械臂运动的仿真程序。机械臂包含了底座、前臂、后臂、手腕和手指等部分。我们以其中的前臂为例,建立如下的运动学模型:文章来源地址https://www.toymoban.com/news/detail-768246.html
到了这里,关于基于Matlab开发的动态机器人轨迹仿真的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!