目 录
巡航规划详细设计... 1
修改记录... 2
目 录... 3
1 背景... 5
2 系统环境... 6
2.1 巡航规划与其它模块联系... 6
2.2 巡航规划接口说明... 6
3 规划模块设计... 9
3.1 巡航规划架构图... 9
3.2 预处理... 10
3.3 Planner. 10
3.3.1 Geometry planner. 10
3.3.1.1 环境信息更新... 10
3.3.1.2 路径规划... 14
3.3.1.3 速度规划... 20
3.3.2 其他规划器... 23
3.4 后处理... 23
4 要点及风险评估... 23
5 设计评审意见... 24
6 参考资料... 24
- 背景
随着产品的升级迭代,对算法的泛化能力和指标都提出了新的需求。一方面后续需要低成本迁移不同停车场,可能面临更多的人流车流、更多的场景(如双车道、不同弯道、道路情况、不同车库层数等),因此对当前模块的工程通用性和算法的泛化能力都有更高的需求;另一方面,基于降成本以及后续性能及产品效果提升的需求,对当前算法的资源占用、效果指标等也也会有更的要求。
当前算法模块主要有以下问题。首先是算法架构的可扩展性存在较大的局限。当前算法主要基于matlab/simulink平台开发,没有通用的工程框架,添加新算法或者更新算法非常困难,而且适配其他模块及工具繁琐且工作量巨大、无法做深层次性能优化。其次是当前框架未能较好利用现有开源生态及借鉴别人的工作。Matlab是商业软件,其生态尤其自动驾驶方面的生态较apollo等开源生态有明显的差距,而且部分重要的组件(如图形计算等)无法进行代码生成,导致当前开发经常需要重复造轮子,工作处于一种闭门造车的状态,效率低下。最后是当前算法通用性不够强。当前算法对场景和逻辑等抽象不够,很多场景基于经验公式开发,对于特定的场景使用特定的策略,后续泛化困难。
当前设计的主要目标是借鉴apollo开源框架进行重构。一方面变更开发语言,使模块能够进行性能的深度调优,并有效地借鉴开源的成果提高效率;另一方面构建统一的工程框架,提升模块的工程通用性,以支撑后续的开发和算法升级;最后,通过将接口与算法与主流平台对齐,后续算法可以逐步更换以提高泛化能力和效果指标。
-
系统环境
- 巡航规划与其它模块联系
巡航规划主要根据决策状态机、处理过的引导线、边界信息等及底盘的反馈信号,综合对不同场景(如直行、转弯、道闸口等)的处理、对直行及绕障等模式的处理、对路径和速度的生成和优化,最终输出一条轨迹参考线发给控制,进而决定整车运动路径及速度。
-
- 巡航规划接口说明
根据规划的功能,其主要的输入信息应包含如下:
-
- 地图及定位信息(目前版本算法主要放在边界信息接口内)
- 感知障碍物信息(目前版本算法主要放在边界信息接口内)
- 全局导航信息(目前版本算法主要放到引导线信息接口内)
- 车身反馈信息(包含速度、加速度、档位等)
- 预测信息(后续能力提升及泛化需要)
- 交通规则信息(后续场景升级可能需要)
同时,规划的输出信息主要如下:
-
- 规划轨迹(包含路径、速度两大类及衍生信息如曲率、加速度等信息)
- 本模块的状态信息(主要是异常信息等,后续做产品化安全需要)
下面针对当前算法的接口进行具体说明:
A)输入接口
1、DEC //决策信息(包含状态机、引导线、边界信息)
2、SMC //车身反馈信息
2、PTP_trajectory_detail //规划的反馈信息(实际未使用)
3、PTP_out //旧的规划输出接口(实际未使用)
4、PTP_trajectory_head //规划的车头轨迹(实际未使用)
5、PTP_Inner_Monitor_out //规划内部信息监控(实际未使用)
-
规划模块设计
- 巡航规划架构图
| 巡航规划模块架构图 |
如图所示,巡航规划模块的整体架构包含三个部分,预处理、规划器(planner)、后处理,其中规划器为主体模块。规划器为各种具体的规划算法的总称。当前的算法主要基于曲率几何推导,因此把其命名为geometry planner。其余为业内主流的一些规划算法,包括lattice、EM、openspace、RRT、reinforce等。下面针对每个模块做概要说明:
预处理:对planner所需的数据进行处理,主要对输入的数据降噪、去毛刺、转换为模块所需要的数据格式及单位转换等。
Planner:根据地图定位信息、障碍物信息、决策状态机、车身反馈、导航信息等,进行综合考虑,同时结合如平稳、高效、资源占用少等指标,计算出一条优化的轨迹。考虑到模块的拓展性,会在当前算法的基础上根据场景的需求不断增加新算法,比如lattice、EM、openspace、RRT等,补充其能力。目前主要的算法为Geometry planner,主要原理如下:1、通过以当前位置,根据引导线跟随、绕行各障碍物的曲率结合人工驾驶经验,算出下一时刻的行驶曲率和速度。2、再根据下一时刻的曲率、速度等推导下一时刻的位置,并在此基础上重复计算驾驶行为。3、通过上述两个步骤的反复迭代,最终生成一条包含40个点的整体轨迹,并输出给下游。
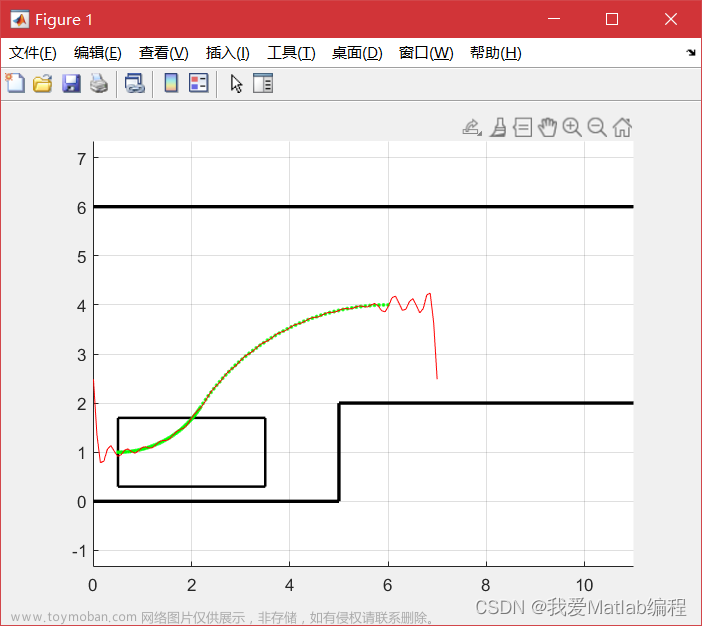
后处理:对当前模块的状态进行监控、对算法生成的轨迹等进行评价,同时支持手动调式模式,可以手动生成指定的轨迹输出给下游进行调试。
-
- 预处理(由框架处理)
滤波:针对底盘反馈的速度信号进行2阶滤波及限幅处理,使其降频到3hz左右(经验值),幅度限制在正负70以内,以免出现异常值。
信号转换:将方向盘转角转换为弧度表示,同时通过车速和方向盘转速双重验证,检测输入的方向盘信号是否有效。
-
-
Planner
-
Geometry planner
- 环境信息更新
-
Geometry planner
-
Planner
主要包含如下功能:
1、根据之前计算出来的控制量,更新下一时刻的车辆位置信息,供计算后续控制量使用。
2、计算目标线与主车的相对位置,相对角度,供后续计算引导线跟随使用。
3、根据算法估计的状态,更新每一个轨迹点上边界线,障碍物边界等与车的相对位置,供后续计算避障使用。
-
-
-
-
- 车辆位置推算
-
-
-
|
(xt,yt) |
|
(xt+1,yt+1) |
|
x |
|
y |
计算在每个循环推算的时刻,车身的坐标及yaw角。是一种基于运动学的理想位姿迭代。计算关系如下式:
xt+1=xt+vx*dt*cosyawrate*dt
θt+1=θt+yawrate*dt
其中:vx
为车辆x方向速度,vy
为车辆y方向速度,dt为时间间隔,yawrate为角速度。
在实际计算过程中,考虑了感知的延时和系统的延时对车辆姿态的影响,因此分别对两种延时进行估计,根据估计参数进行系统姿态延时估算,并将其作为当前初始值。
另外,在车道线跟随的时候,有的时候可能并不需要车后轴中心在中心线上,尤其是转弯的时候,因此添加对原点位置的平移,使其更符合人的驾驶习惯。文章来源:https://www.toymoban.com/news/detail-768330.html
通过每个时刻计算得到的纵向速度、横向速度、角速度,由上式计算下一个时刻的位置。通过反复计算40次,得到40个时刻的车辆位置,输出到下游。文章来源地址https://www.toymoban.com/news/detail-768330.html
到了这里,关于自动驾驶代客泊车AVP巡航规划详细设计的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!