一、前言
接着上一篇博客的内容,上一篇博客实现了定时器输出pwm,这次我们使用DMA来驱动gpio高速翻转,来探索一下stm32h750的gpio翻转极限
二、原理
这里大家可能有点疑惑,为什么要用dma来控制gpio
使用DMA的原因有两点:
第一点就是资源消耗问题,我的项目中有个数组,该数组有13240个元素,每个元素都是16位的,分别对应16个gpio口的状态,当然我可以通过一个循环来发送这些成员,但是这样对cpu的资源消耗非常大,发送的时候cpu就干不了其他事了,如果中断处理其他任务,那么gpio的控制就不连续;尝试过多线程,效果不尽人意
第二点就是速度问题,通过一个循环来发送这些成员,最终结果还是把这些数据写入GPIO的寄存器中,用dma直接将数据搬运到GPIO的寄存器中当然是最快的了
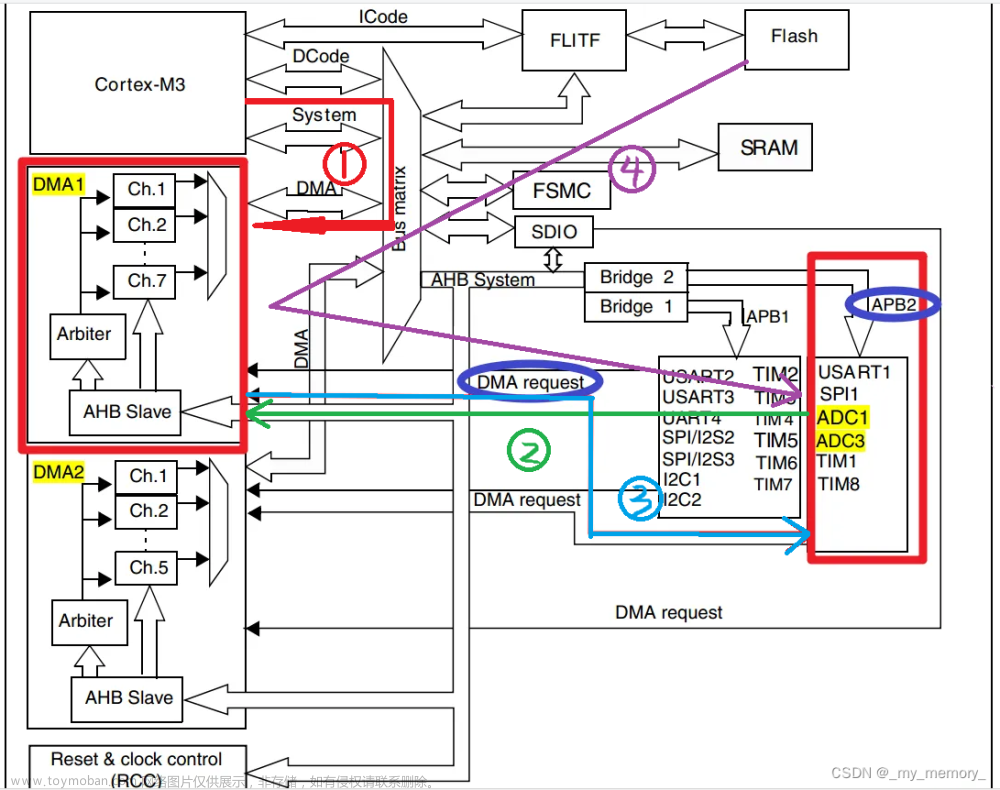
解答一下疑惑,什么是DMA
顺带提一下GPIO的寄存器,我们一会要用到的是ODR

三、配置IO口
接着上一次的工程,配置GPIO口
我的项目中用到 GPIOD0 —— D15和 GPIOE0 —— E15 共32个io,本例程中只用到GPIOE0 —— E15,读者可只配置GPIOE0 —— E15
有两种配置方法
方法一:在cubemx中配置PD0和PE0为输出口,再在keil中修改整个PB口PE口。此方法的缺点是每次在CUBEMX中修改了功能重新生成之后,都需要在keil中修改
方法二:直接在cubemx中将需要的32个io全部配置为输出。此方法的缺点是工作量较大,选32个io比较辛苦,优点是一劳永逸
在这里我用方法一,读者可按自己的喜好自行选择
根据stm32官方手册介绍,GPIO每次翻转最快只需要两个时钟周期

四、配置DMA
添加一个dma,选择存储器到存储器,模式选normal
为什么选存储器到存储器,而不选存储器到外设?GPIO不是外设吗?
关于这个问题,好多博主都只讲了怎么配置dma,并没有详细的讲原理,这里我简单的讲一下:其实选存储器到存储器和选存储器到外设都是一样的,区别在使用的时候绑定外设GPIO寄存去的地址。接下来我们再添加一个存储器到外设的,试验对比一下
但是外设一般是指在stm32芯片之外的设备,我们要控制的GPIO是在stm32芯片上的,所以理论上它不属于外设(但是我们当作是有一个外设以并口的方式连接到GPIO上,也是可以的),这里更推荐选memory to memory模式,即选存储器到存储器
关于循环模式的问题,也简单讲一下,先看图
看完这个知道你要选normal还是circular了吧,很多人说选了normal,只能发送一次,第二次再发的时候没反应了,至于选normal怎么触发第二次发送的问题,在下一篇博客会讲到


五、程序内容
5.1 gpio配置
由于我们刚刚只配置了PD0和PE0,所以还需要配置一下使用整个PB口PE口
打开 main.c 找到 MX_GPIO_Init()函数,将 GPIO_PIN_0改成GPIO_PIN_All
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOH_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_All, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOE, GPIO_PIN_All, GPIO_PIN_RESET);
/*Configure GPIO pin : PD0 */
GPIO_InitStruct.Pin = GPIO_PIN_All;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/*Configure GPIO pin : PE0 */
GPIO_InitStruct.Pin = GPIO_PIN_All;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
}

5.2 keil中添加.C和.h文件(需要DMA发送控制GPIO的数组波形文件)如不想这么麻烦的可以略过,在main函数中定义一个数组即可,因为我的数组太大了,而且为了方便更改,故单独存了一个文件
打开工程所在目录,在目录下新建一个文件夹(文件夹名随意,中文没试过,不知道会不会报错)存放.C和.h文件,我这里建的文件夹命名为User
可以直接将.C和.h文件放置在新建的文件夹里,也可以在文件夹里再新建个文件夹分类存放,总之按个人喜好就行

我的.C和.h文件内容:
先是WaveData.C文件
#include "WaveData.h"
const unsigned int wave_data[13240] = {
0X98EC,0X58EC,0X98EC,0X58EC,0X98D4,0X58D4,0X98D4,0X58D4,0X98BC,0X58BC,0X98BC,0X58BC,0X98A4,0X58A4,0X98A4,0X58A4,0X988C,0X588C,
0X9888,0X5888,0X9870,0X5870,0X9870,0X5870,0X9858,0X5858,0X9858,0X5858,0X9840,0X5840,0X9840,0X5840,0X9828,0X5828,0X9828,
0X582C,0X9814,0X5814,0X9814,0X5814,0X97FC,0X57FC,0X97FC,0X57FC,0X97E4,0X57E4,0X97E4,0X57E4,0X97CC,0X57CC,0X97CC,0X57CC,
0X97B0,0X57B0,0X97B0,0X57B0,0X9798,0X5798,0X9798,0X5798,0X9780,0X5780,0X9780,0X5780,0X9768,0X5768,0X9768,0X5768,0X9750,
0X5754,0X9754,0X5754,0X973C,0X573C,0X973C,0X573C,0X9724,0X5724,0X9724,0X5724,0X970C,0X570C,0X970C,0X570C,0X96F4,0X56F4,
0X96F0,0X56F0,0X96D8,0X56D8,0X96D8,0X56D8,0X96C0,0X56C0,0X96C0,0X56C0,0X96A8,0X56A8,0X96A8,0X56A8,0X9690,0X5690,0X9690,
0X5694,0X967C,0X567C,0X967C,0X567C,0X9664,0X5664,0X9664,0X5664,0X964C,0X564C,0X964C,0X564C,0X9634,0X5634,0X9634,0X5634,
0X9618,0X5618,0X9618,0X5618,0X9600,0X5600,0X9600,0X5600,0X95E8,0X55E8,0X95E8,0X55E8,0X95D0,0X55D0,0X95D0,0X55D0,0X95B8,
0X55BC,0X95BC,0X55BC,0X95A4,0X55A4,0X95A4,0X55A4,0X958C,0X558C,0X958C,0X558C,0X9574,0X5574,0X9574,0X5574,0X955C,0X555C,
//...太多了这里不贴了...
}
下面是是WaveData.h文件
#ifndef _IMAGEDATA_H_
#define _IMAGEDATA_H_
// WaveData.c
/* --------------------------------------- */
extern const unsigned int wave_data[];
#endif
/* FILE END */
接下来将WaveData.C文件添加到工程里,并添加路径

可以看到.c文件就添加进来了,别急,现在还用不了,还需要添加的.h文件所在的文件夹到工程路径中
build一下就会发现自动找到.h文件了
5.3 DMA实现GPIO的高速翻转代码实现 (memory to memory模式)
在main.c文件中添加如下代码:
包含头文件
/* USER CODE BEGIN Includes */
#include "WaveData.h"
/* USER CODE END Includes */
如果略过了 < 5.2 keil中添加.C和.h文件” > 的可以定义一个dma缓冲区:
/* USER CODE BEGIN PV */
uint16_t dma_buff[12] = {0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0055, 0x00AA, 0x0000, 0xFFFF, 0xAA55, 0x55AA};
/* USER CODE END PV */
启动 DMA 传输
/* USER CODE BEGIN 2 */
HAL_DMA_Start(&hdma_memtomem_dma1_stream0, (uint32_t)(dma_buff), (uint32_t)(&GPIOE->ODR), sizeof(dma_buff)/sizeof(dma_buff[0]));
/* USER CODE END 2 */
5.4 输出结果
== 需要注意,因为我们前面配置DMA选的是normal模式,该模式只发送一次即停止发送了,所以只有在开发板商店的一瞬间或触发一次DMA搬运,搬运完即停止搬运了,后面就没有输出了,看图 ==
我这个是用的我的数组,13240个元素,如果用的是uint16_t dma_buff[12] = {0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0055, 0x00AA, 0x0000, 0xFFFF, 0xAA55, 0x55AA};,则转瞬即逝,如图

发现和我们预设的数组并不一致,这里可能是dma的总线频率设置太高了,降一下频率试试
DMA挂在AHB1总线上的,将AHB1由原来的240MHz降低至120MHz
再次测试
看起来没什么问题,可以看到翻转频率达到了20MHz,导出数据解析一下
和我们的数组uint16_t dma_buff[12] = {0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0055, 0x00AA, 0x0000, 0xFFFF, 0xAA55, 0x55AA};匹配,没有问题
如果要方便观察,可以将DMA选为CIRCULAR模式,或者直接在void MX_DMA_Init(void)函数中将DMA模式由 DMA_NORMAL 更改为 DMA_CIRCULAR 模式,在DMA_CIRCULAR 模式下,会自动循环发送dma_buff[8]的内容
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* Configure DMA request hdma_memtomem_dma1_stream0 on DMA1_Stream0 */
hdma_memtomem_dma1_stream0.Instance = DMA1_Stream0;
hdma_memtomem_dma1_stream0.Init.Request = DMA_REQUEST_MEM2MEM;
hdma_memtomem_dma1_stream0.Init.Direction = DMA_MEMORY_TO_MEMORY;
hdma_memtomem_dma1_stream0.Init.PeriphInc = DMA_PINC_ENABLE;
hdma_memtomem_dma1_stream0.Init.MemInc = DMA_MINC_DISABLE;
hdma_memtomem_dma1_stream0.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_memtomem_dma1_stream0.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_memtomem_dma1_stream0.Init.Mode = DMA_CIRCULAR;//DMA_NORMAL; //改为DMA_CIRCULAR模式
hdma_memtomem_dma1_stream0.Init.Priority = DMA_PRIORITY_LOW;
hdma_memtomem_dma1_stream0.Init.FIFOMode = DMA_FIFOMODE_ENABLE;
hdma_memtomem_dma1_stream0.Init.FIFOThreshold = DMA_FIFO_THRESHOLD_FULL;
hdma_memtomem_dma1_stream0.Init.MemBurst = DMA_MBURST_SINGLE;
hdma_memtomem_dma1_stream0.Init.PeriphBurst = DMA_PBURST_SINGLE;
if (HAL_DMA_Init(&hdma_memtomem_dma1_stream0) != HAL_OK)
{
Error_Handler( );
}
/* Configure DMA request hdma_dma_generator0 on DMA1_Stream1 */
hdma_dma_generator0.Instance = DMA1_Stream1;
hdma_dma_generator0.Init.Request = DMA_REQUEST_GENERATOR0;
hdma_dma_generator0.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_dma_generator0.Init.PeriphInc = DMA_PINC_ENABLE;
hdma_dma_generator0.Init.MemInc = DMA_MINC_DISABLE;
hdma_dma_generator0.Init.PeriphDataAlignment = DMA_PDATAALIGN_HALFWORD;
hdma_dma_generator0.Init.MemDataAlignment = DMA_MDATAALIGN_HALFWORD;
hdma_dma_generator0.Init.Mode = DMA_NORMAL;
hdma_dma_generator0.Init.Priority = DMA_PRIORITY_LOW;
hdma_dma_generator0.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
if (HAL_DMA_Init(&hdma_dma_generator0) != HAL_OK)
{
Error_Handler( );
}
}

可以看到,改成循环模式后就会一直循环发送
为了方便观察,我们把数组改成如下,dma改成循环发送
uint16_t dma_buff[12] = {0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF};
结果如图:
总结
最后探了一下STM32H750VBT6的DMA控制GPIO的极限翻转频率,可以看到虽然可以到40Mhz,但是已经不稳定了,比较稳定的是在10MHz以下文章来源:https://www.toymoban.com/news/detail-768631.html
图片中dma缓冲区为 uint16_t dma_buff[12] = {0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF, 0x0000, 0xFFFF};
可以看到后面多了一些东西 文章来源地址https://www.toymoban.com/news/detail-768631.html
文章来源地址https://www.toymoban.com/news/detail-768631.html
到了这里,关于STM32使用DMA实现GPIO的高速翻转的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!