3D点云数据是表示3D形状的一种数据结构,它通常是通过激光扫描、立体摄影或其他3D扫描技术获得的。处理和可视化这些数据在很多领域中都非常有用,比如计算机视觉、机器人技术、地理信息系统等。MATLAB提供了一系列的工具,可以帮助我们方便地进行3D点云数据的处理与可视化。
本文将指导您如何在MATLAB中加载、处理并可视化3D点云数据。
1. 加载点云数据
首先,您需要有一个3D点云数据文件。这里我们假设您有一个名为data.ply的点云数据文件。
使用MATLAB中的pcread函数,您可以轻松加载点云数据。
% 读取点云数据
ptCloud = pcread('data.ply');
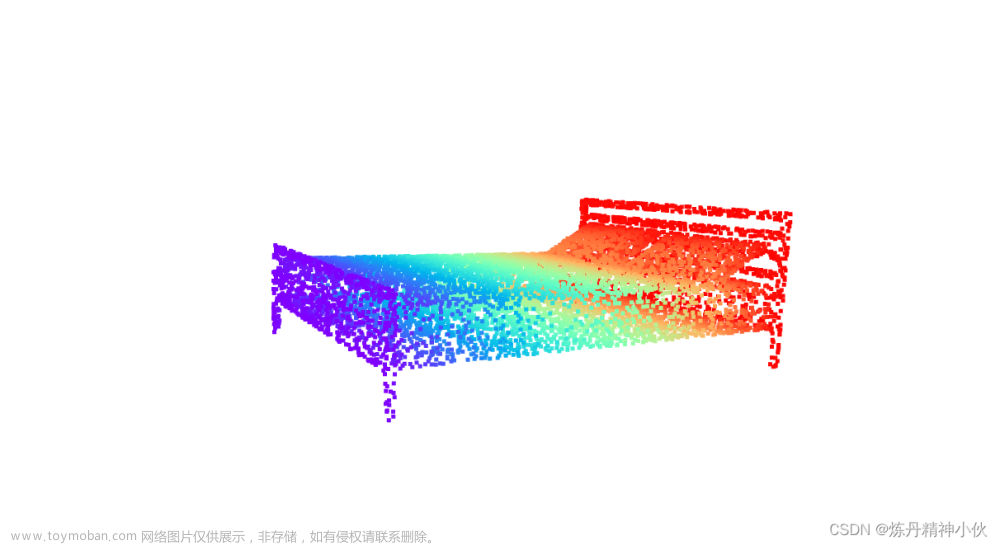
2. 可视化点云数据
加载点云数据后,您可以使用pcshow函数来查看它。
% 显示点云
pcshow(ptCloud);
title('原始点云数据');
xlabel('X轴');
ylabel('Y轴');
zlabel('Z轴');
pcshow函数将在3D坐标系中显示点云,您可以使用鼠标旋转、缩放或平移来查看数据。
3. 降噪和滤波
在真实世界中获得的点云数据可能包含噪声,这可能会影响到后续的数据处理和分析。因此,进行噪声去除是很有必要的。
MATLAB提供了pcdenoise函数来帮助我们去除点云中的噪声。
% 使用pcdenoise进行降噪
denoisedPtCloud = pcdenoise(ptCloud);
4. 下采样
如果您的点云数据点数太多,导致处理速度缓慢或者消耗太多的内存,那么您可以考虑使用下采样来减少数据点的数量。
pcdownsample函数可以帮助我们完成这项任务。例如,使用random方法随机去除一些点。
% 使用pcdownsample进行随机下采样
downsampledPtCloud = pcdownsample(ptCloud, 'random', 0.1);
此处的0.1表示保留原始点云中的10%的点。
以上就是3D点云数据在MATLAB中的基本处理和可视化方法的第一部分。这部分我们介绍了如何加载点云数据、如何显示点云、以及如何进行基本的降噪和下采样处理。
MATLAB中3D点云数据的处理与可视化(第二部分)
在第一部分中,我们已经介绍了如何加载、显示以及进行基本的点云处理,如降噪和下采样。在这部分,我们将继续深入了解点云的进一步处理和分析方法。
5. 点云配准
在某些应用中,我们可能需要将多个点云数据集对齐到一个统一的坐标系统中,这称为点云配准。MATLAB提供了pcregistericp函数来帮助我们实现这个功能。
假设我们有两个点云ptCloudA和ptCloudB,我们想要将ptCloudB对齐到ptCloudA:
% 使用迭代最近点算法(ICP)进行点云配准
tform = pcregistericp(ptCloudB, ptCloudA, 'Extrapolate', true);
% 使用得到的变换矩阵将ptCloudB对齐到ptCloudA
mergedPtCloud = pctransform(ptCloudB, tform);
6. 合并点云
在配准后,您可能想要将多个点云合并为一个点云。pcmerge可以帮助您实现这一点:
% 合并两个点云
mergedPtCloud = pcmerge(ptCloudA, mergedPtCloud, 1e-3);
其中,1e-3是两点被认为是同一点的最大距离。
7. 特征提取
在某些应用中,您可能需要从点云中提取关键点或特征。MATLAB提供了多种方法来实现这一点。
例如,使用pcfindneighbors可以帮助您找到每个点的邻居点:
% 为每个点找到10个最近的邻居
neighbors = pcfindneighbors(ptCloud, 10);
8. 区域分割
另一个常见的需求是将点云分割成不同的区域或对象。pcsegdist函数可以根据点之间的距离来分割点云:
% 使用距离为0.1的阈值进行点云分割
[labels, numClusters] = pcsegdist(ptCloud, 0.1);
这样,每个簇或区域将被分配一个标签,numClusters表示总共有多少个簇或区域。
MATLAB中3D点云数据的处理与可视化(第三部分)
接下来,我们将探讨如何从点云数据中重建3D模型,评估点云的质量,以及其他高级处理方法。
9. 3D模型重建
在许多应用中,直接使用点云可能并不是很方便,特别是当我们想要进行模拟或其他类型的分析时。在这种情况下,将点云转换成一个3D模型(如网格或曲面)可能会更加有用。
MATLAB提供了pcfitplane函数,可以从点云中拟合平面模型:
% 从点云中拟合一个平面
[model1, inliers, outliers] = pcfitplane(ptCloud, 0.1);
% 使用inliers创建一个新的点云,表示平面上的点
planePtCloud = select(ptCloud, inliers);
此外,还有其他函数可以从点云中拟合球体、圆柱体、锥体等几何形状。
10. 点云质量评估
评估点云的质量对于许多应用都是很重要的。例如,如果点云中的点不够密集,可能会导致模型重建的质量下降。
pcquality函数可以计算点云的多种质量指标:
% 计算点云的平均点密度
density = pcquality(ptCloud, 'PointDensity');
此外,您还可以计算其他质量指标,如点的标准偏差、最大距离等。
11. 其他高级处理
除了上述功能,MATLAB还提供了许多其他高级点云处理功能。例如:文章来源:https://www.toymoban.com/news/detail-769345.html
-
pcdist:计算点云中两点之间的距离。 -
pctransform:根据给定的变换矩阵转换点云。 -
pcnormals:计算点云中每个点的法线。 - 等等。
总结:点云数据在很多应用中都有很大的价值,从机器人技术到地理信息系统,再到计算机视觉。MATLAB为处理和可视化点云数据提供了丰富的工具和函数,帮助研究人员和工程师轻松地解决实际问题。本文提供了一个基本的介绍,希望能帮助您快速入门MATLAB中的点云处理。文章来源地址https://www.toymoban.com/news/detail-769345.html
到了这里,关于MATLAB中3D点云数据的处理与可视化的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!