RT-Thread STM32G070RB-Nucleo开发板的BSP说明

简介
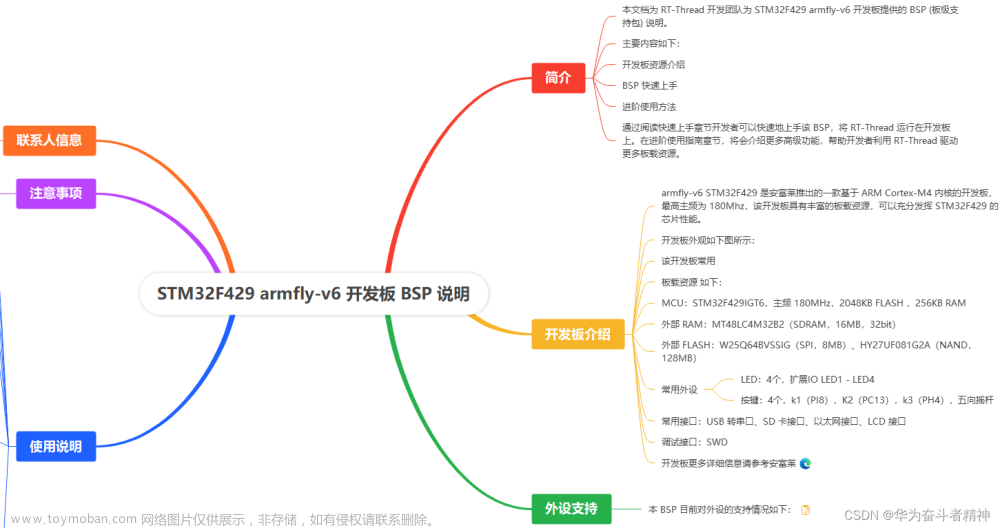
本文档为 STM32G070RB-Nucleo 开发板的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 快速上手
- 进阶使用方法
通过阅读快速上手章节开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。在进阶使用指南章节,将会介绍更多高级功能,帮助开发者利用 RT-Thread 驱动更多板载资源。
开发板介绍
STM32G070RB-Nucleo 开发板是 ST 官方推出的一款基于 ARM Cortex-M0+ 内核的开发板,最高主频为 64Mhz,该开发板具有丰富的扩展接口,可以方便验证 STM32G070RB 的芯片性能。
开发板外观如下图所示:
该开发板常用 板载资源 如下:
- MCU:STM32G070RB,主频 64MHz,128KB FLASH ,36KB RAM
- 外部 RAM:无
- 外部 FLASH:无
- 常用外设
- 按键:1个,user(兼具唤醒功能,PC13)
- 常用接口:USB 转串口、arduino 接口等
- 调试接口,标准 SWD
开发板更多详细信息请参考 ST 的 NUCLEO 开发板介绍。
外设支持
本 BSP 目前对外设的支持情况如下:
| 板载外设 | 支持情况 | 备注 |
|---|---|---|
| ST-LINK 虚拟串口 | 支持 | 使用 USART2 |
| 片上外设 | 支持情况 | 备注 |
| GPIO | 支持 | PA0, PA1… PC15 —> PIN: 0, 1…47 |
| UART | 支持 | USART1/2/3 |
| TIM | 支持 | TIM1/3 |
| PWM | 支持 | |
| SPI | 支持 | SPI1/2 |
| I2C | 支持 | 软件 I2C |
| ADC | 支持 | |
| WDT | 支持 | |
| FLASH | 支持 | 已适配 FAL |
| RTC | 暂不支持 | 详见注意事项 |
使用说明
使用说明分为如下两个章节:
-
快速上手
本章节是为刚接触 RT-Thread 的新手准备的使用说明,遵循简单的步骤即可将 RT-Thread 操作系统运行在该开发板上,看到实验效果 。
-
进阶使用
本章节是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。
快速上手
本 BSP 为开发者提供 MDK5 和 IAR 工程,并且支持 GCC 开发环境。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
硬件连接
使用数据线连接开发板到 PC,打开电源开关。
编译下载
双击 project.uvprojx 文件,打开 MDK5 工程,编译并下载程序到开发板。
将工程使用的仿真器设置为ST-Link并安装仿真器好驱动程序以后,将开发板连接到PC,点击下载按钮即可下载程序到开发板。
运行结果
下载程序成功之后,系统会自动运行。
连接开发板对应串口到 PC , 在终端工具里打开相应的串口(115200-8-1-N),复位设备后,可以看到 RT-Thread 的输出信息:
\ | /
- RT - Thread Operating System
/ | \ 4.0.2 build Jul 1 2020
2006 - 2019 Copyright by rt-thread team
msh >
进阶使用
此 BSP 默认只开启了 GPIO 和 UART 的功能,如果需使用 SPI,I2C 等更多高级功能,需要利用 ENV 工具对BSP 进行配置,步骤如下:
-
在 bsp 下打开 env 工具。
-
输入
menuconfig命令配置工程,配置好之后保存退出。 -
输入
pkgs --update命令更新软件包。 -
输入
scons --target=mdk5/iar命令重新生成工程。
本章节更多详细的介绍请参考 STM32 系列 BSP 外设驱动使用教程。
注意事项
- G0系列RTC驱动有点问题,详见论坛 该贴
示例代码
…\bsp\stm32\libraries\HAL_Drivers\drv_usart.c
#include "board.h"
#include "drv_usart.h"
#include "drv_config.h"
#ifdef RT_USING_SERIAL
//#define DRV_DEBUG
#define LOG_TAG "drv.usart"
#include <drv_log.h>
#if !defined(BSP_USING_UART1) && !defined(BSP_USING_UART2) && !defined(BSP_USING_UART3) && \
!defined(BSP_USING_UART4) && !defined(BSP_USING_UART5) && !defined(BSP_USING_UART6) && \
!defined(BSP_USING_UART7) && !defined(BSP_USING_UART8) && !defined(BSP_USING_LPUART1)
#error "Please define at least one BSP_USING_UARTx"
/* this driver can be disabled at menuconfig -> RT-Thread Components -> Device Drivers */
#endif
#ifdef RT_SERIAL_USING_DMA
static void stm32_dma_config(struct rt_serial_device *serial, rt_ubase_t flag);
#endif
enum
{
#ifdef BSP_USING_UART1
UART1_INDEX,
#endif
#ifdef BSP_USING_UART2
UART2_INDEX,
#endif
#ifdef BSP_USING_UART3
UART3_INDEX,
#endif
#ifdef BSP_USING_UART4
UART4_INDEX,
#endif
#ifdef BSP_USING_UART5
UART5_INDEX,
#endif
#ifdef BSP_USING_UART6
UART6_INDEX,
#endif
#ifdef BSP_USING_UART7
UART7_INDEX,
#endif
#ifdef BSP_USING_UART8
UART8_INDEX,
#endif
#ifdef BSP_USING_LPUART1
LPUART1_INDEX,
#endif
};
static struct stm32_uart_config uart_config[] =
{
#ifdef BSP_USING_UART1
UART1_CONFIG,
#endif
#ifdef BSP_USING_UART2
UART2_CONFIG,
#endif
#ifdef BSP_USING_UART3
UART3_CONFIG,
#endif
#ifdef BSP_USING_UART4
UART4_CONFIG,
#endif
#ifdef BSP_USING_UART5
UART5_CONFIG,
#endif
#ifdef BSP_USING_UART6
UART6_CONFIG,
#endif
#ifdef BSP_USING_UART7
UART7_CONFIG,
#endif
#ifdef BSP_USING_UART8
UART8_CONFIG,
#endif
#ifdef BSP_USING_LPUART1
LPUART1_CONFIG,
#endif
};
static struct stm32_uart uart_obj[sizeof(uart_config) / sizeof(uart_config[0])] = {0};
rt_uint32_t stm32_uart_get_mask(rt_uint32_t word_length, rt_uint32_t parity)
{
rt_uint32_t mask = 0x00FFU;
if (word_length == UART_WORDLENGTH_8B)
{
if (parity == UART_PARITY_NONE)
{
mask = 0x00FFU ;
}
else
{
mask = 0x007FU ;
}
}
#ifdef UART_WORDLENGTH_9B
else if (word_length == UART_WORDLENGTH_9B)
{
if (parity == UART_PARITY_NONE)
{
mask = 0x01FFU ;
}
else
{
mask = 0x00FFU ;
}
}
#endif
#ifdef UART_WORDLENGTH_7B
else if (word_length == UART_WORDLENGTH_7B)
{
if (parity == UART_PARITY_NONE)
{
mask = 0x007FU ;
}
else
{
mask = 0x003FU ;
}
}
else
{
mask = 0x0000U;
}
#endif
return mask;
}
static rt_err_t stm32_configure(struct rt_serial_device *serial, struct serial_configure *cfg)
{
struct stm32_uart *uart;
RT_ASSERT(serial != RT_NULL);
RT_ASSERT(cfg != RT_NULL);
uart = rt_container_of(serial, struct stm32_uart, serial);
uart->handle.Instance = uart->config->Instance;
uart->handle.Init.BaudRate = cfg->baud_rate;
uart->handle.Init.Mode = UART_MODE_TX_RX;
#ifdef USART_CR1_OVER8
uart->handle.Init.OverSampling = cfg->baud_rate > 5000000 ? UART_OVERSAMPLING_8 : UART_OVERSAMPLING_16;
#else
uart->handle.Init.OverSampling = UART_OVERSAMPLING_16;
#endif /* USART_CR1_OVER8 */
switch (cfg->flowcontrol)
{
case RT_SERIAL_FLOWCONTROL_NONE:
uart->handle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
break;
case RT_SERIAL_FLOWCONTROL_CTSRTS:
uart->handle.Init.HwFlowCtl = UART_HWCONTROL_RTS_CTS;
break;
default:
uart->handle.Init.HwFlowCtl = UART_HWCONTROL_NONE;
break;
}
switch (cfg->data_bits)
{
case DATA_BITS_8:
if (cfg->parity == PARITY_ODD || cfg->parity == PARITY_EVEN)
uart->handle.Init.WordLength = UART_WORDLENGTH_9B;
else
uart->handle.Init.WordLength = UART_WORDLENGTH_8B;
break;
case DATA_BITS_9:
uart->handle.Init.WordLength = UART_WORDLENGTH_9B;
break;
default:
uart->handle.Init.WordLength = UART_WORDLENGTH_8B;
break;
}
switch (cfg->stop_bits)
{
case STOP_BITS_1:
uart->handle.Init.StopBits = UART_STOPBITS_1;
break;
case STOP_BITS_2:
uart->handle.Init.StopBits = UART_STOPBITS_2;
break;
default:
uart->handle.Init.StopBits = UART_STOPBITS_1;
break;
}
switch (cfg->parity)
{
case PARITY_NONE:
uart->handle.Init.Parity = UART_PARITY_NONE;
break;
case PARITY_ODD:
uart->handle.Init.Parity = UART_PARITY_ODD;
break;
case PARITY_EVEN:
uart->handle.Init.Parity = UART_PARITY_EVEN;
break;
default:
uart->handle.Init.Parity = UART_PARITY_NONE;
break;
}
#ifdef RT_SERIAL_USING_DMA
if (!(serial->parent.open_flag & RT_DEVICE_OFLAG_OPEN)) {
uart->dma_rx.remaining_cnt = cfg->bufsz;
}
#endif
if (HAL_UART_Init(&uart->handle) != HAL_OK)
{
return -RT_ERROR;
}
uart->DR_mask = stm32_uart_get_mask(uart->handle.Init.WordLength, uart->handle.Init.Parity);
return RT_EOK;
}
static rt_err_t stm32_control(struct rt_serial_device *serial, int cmd, void *arg)
{
struct stm32_uart *uart;
#ifdef RT_SERIAL_USING_DMA
rt_ubase_t ctrl_arg = (rt_ubase_t)arg;
#endif
RT_ASSERT(serial != RT_NULL);
uart = rt_container_of(serial, struct stm32_uart, serial);
switch (cmd)
{
/* disable interrupt */
case RT_DEVICE_CTRL_CLR_INT:
/* disable rx irq */
NVIC_DisableIRQ(uart->config->irq_type);
/* disable interrupt */
__HAL_UART_DISABLE_IT(&(uart->handle), UART_IT_RXNE);
#ifdef RT_SERIAL_USING_DMA
/* disable DMA */
if (ctrl_arg == RT_DEVICE_FLAG_DMA_RX)
{
HAL_NVIC_DisableIRQ(uart->config->dma_rx->dma_irq);
if (HAL_DMA_Abort(&(uart->dma_rx.handle)) != HAL_OK)
{
RT_ASSERT(0);
}
if (HAL_DMA_DeInit(&(uart->dma_rx.handle)) != HAL_OK)
{
RT_ASSERT(0);
}
}
else if(ctrl_arg == RT_DEVICE_FLAG_DMA_TX)
{
HAL_NVIC_DisableIRQ(uart->config->dma_tx->dma_irq);
if (HAL_DMA_DeInit(&(uart->dma_tx.handle)) != HAL_OK)
{
RT_ASSERT(0);
}
}
#endif
break;
/* enable interrupt */
case RT_DEVICE_CTRL_SET_INT:
/* enable rx irq */
HAL_NVIC_SetPriority(uart->config->irq_type, 1, 0);
HAL_NVIC_EnableIRQ(uart->config->irq_type);
/* enable interrupt */
__HAL_UART_ENABLE_IT(&(uart->handle), UART_IT_RXNE);
break;
#ifdef RT_SERIAL_USING_DMA
case RT_DEVICE_CTRL_CONFIG:
stm32_dma_config(serial, ctrl_arg);
break;
#endif
case RT_DEVICE_CTRL_CLOSE:
if (HAL_UART_DeInit(&(uart->handle)) != HAL_OK )
{
RT_ASSERT(0)
}
break;
}
return RT_EOK;
}
源码下载
…\bsp\stm32\stm32g070-st-nucleo\project.uvproj
 文章来源:https://www.toymoban.com/news/detail-769953.html
文章来源:https://www.toymoban.com/news/detail-769953.html
RT-Thread STM32G070RB-Nucleo开发板的BSP说明 源码下载文章来源地址https://www.toymoban.com/news/detail-769953.html
维护人:
- 华为奋斗者精神, 邮箱:1992152446@qq.com
到了这里,关于RT-Thread STM32G070RB-Nucleo开发板的BSP说明的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!