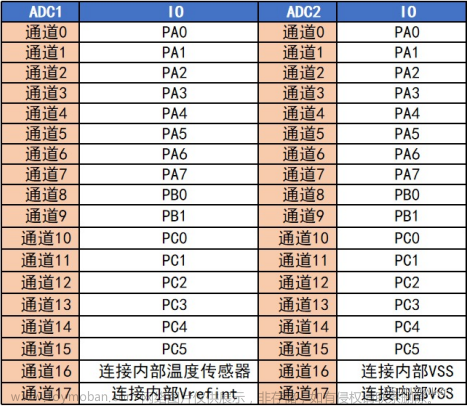
C8T6只有十个外部输入通道,IN0到IN9,参照引脚定义表。

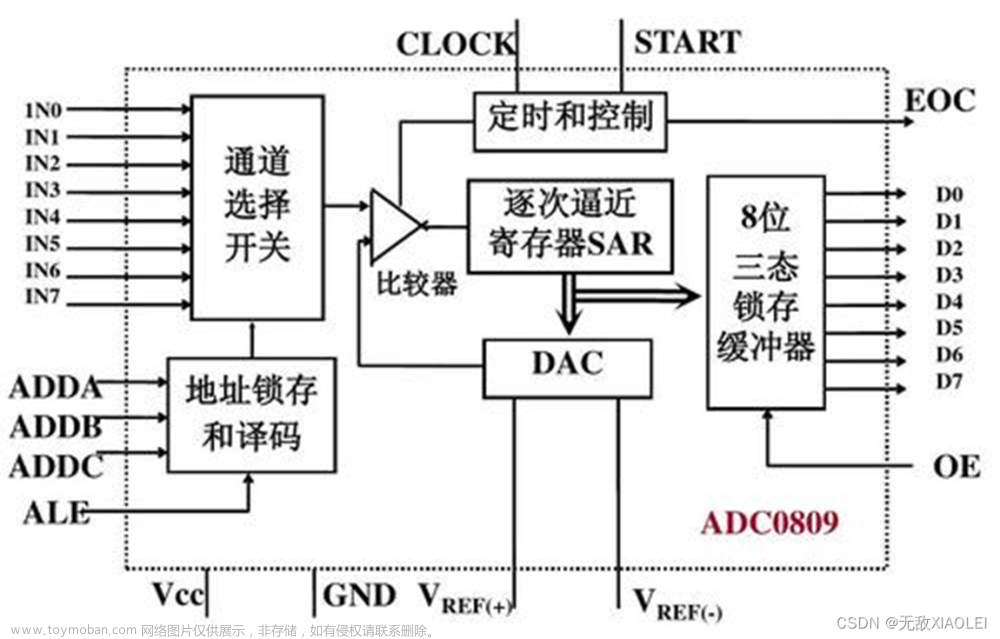
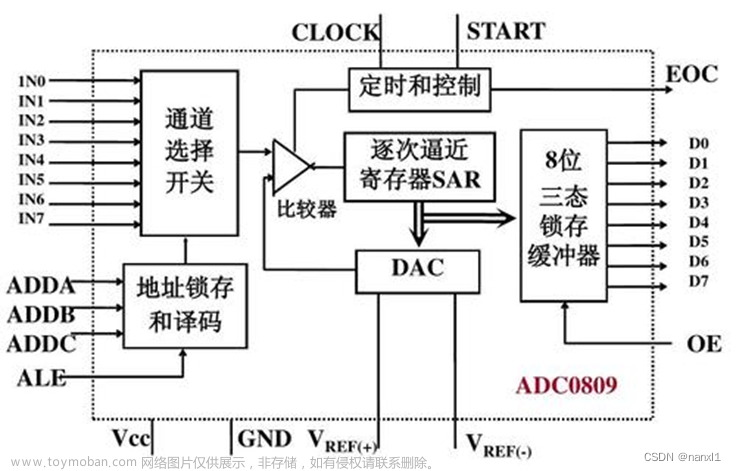
为什么叫逐次逼近,先要明白原理,它是如何知道对应的模拟量该转为多大的数字呢,SAR先将一个较大的数用DAC转化为模拟量,再和输入的模拟量比较,如果待测模拟量大于比较量,则SAR值太小,反之就太大,如果太大,就取半,类似二分法,夹逼法,所以i叫逐次逼近ADC。
比较器受时钟控制,因为输入如果很快的话,必须要比较器跟上速度。三位锁存缓冲器干嘛的,我的理解是,比如待测量真实数值为7,假设第一次SAR值设为了10,7小于10,那么第二次就会取半,就为5,而5>7。这时候,SAR已经被覆盖了,机器怎么知道待测量在5--10之间呢,如果不记住上一次的值(10),机器就只知道待测量大于5,这就没意义,所以,每次比较后,SAR值都会存入三态锁存缓冲器,毕竟逼近,至少得有两个值才能逼近对吧。
下图是简化后的图,一般配置ADC按照这么来就行了,条理清晰。

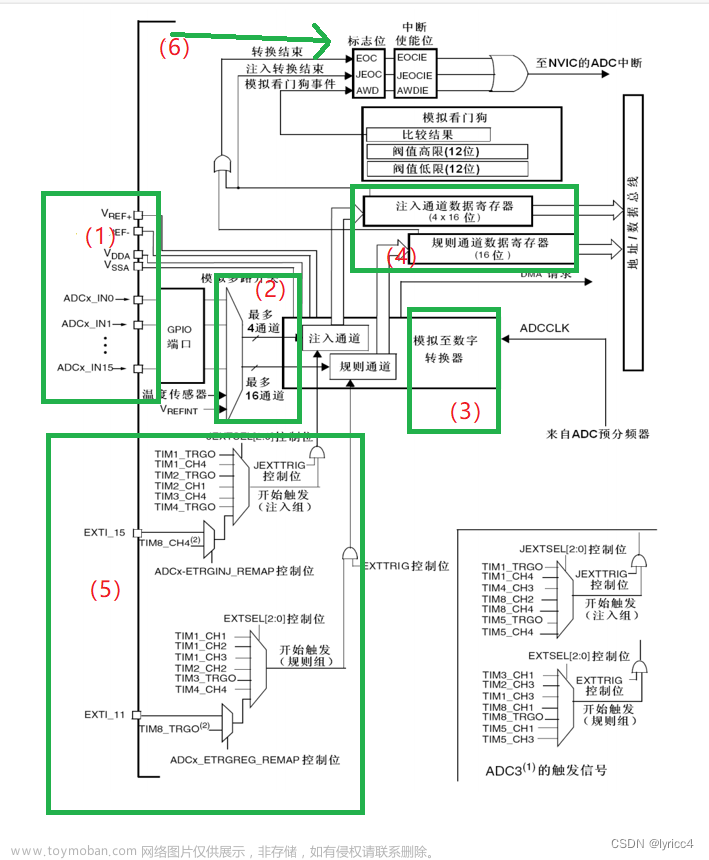
已知STM32F103C8T6 ADC资源有:ADC1、ADC2,10个外部输入通道。根据下面的引脚定义表,可以知道对应通道的对应引脚,这是不能随意更改的。

ADC有两个转换单元,规则组与注入组,规则组有1-16个序列,注入组只有4个。规则组与注入组就像队列一样,将通道放入其中,转换就会依次按照序列从小到大进行。
转换模式
转换模式有4种,单次转换或连续转换,扫描模式或非扫描模式,这两两结合就有四种。非扫描模式就是间断模式。



间断模式下一次触发可以不将规则组的所有通道全部转换,可以将扫描模式认为是间断模式的特殊情况,比如n=16,一次触发按顺序依次转换16个通道。

单次或连续扫描,由ADC_CR2的CONT位决定,而扫描模式与间断模式都有各自的位(在ADC_CR1)决定开启或关闭。间断模式由DISCEN位决定是否开启,而扫描模式由SCAN位决定是否开启。



ADON位,AD转换开关,ADC_CMD()就是设置的此位。

.ADC_SoftwareStartConvCmd(ADC1, ENABLE);
实际上是设置CR1,给ENABLE则将CR1或上0x0050 0000。给DISABLE,则与上0xFFAF FFFF。对应设置的是CR1的20到23位。


注意,如果设置为扫描模式,因为一个ADC只有一个数据寄存器,后转换的通道会覆盖前面转换的数据。如何实现多通道并且数据不被覆盖呢,有两种,一种模拟多通道。一种真多通道。
模拟多通道
就是通过非扫描模式+单次转换,在while里依次设置规则组并且开始转换,然后读取数据,每次规则组里都只有一个通道,由于while很快,所以看起来像多通道。
代码文章来源地址https://www.toymoban.com/news/detail-770283.html
#include "stm32f10x.h" // Device header
void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // 将apb2时钟6分频,72/6=12
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_InitTypeDef a;
a.ADC_ContinuousConvMode = DISABLE; // disable表示单次转换
a.ADC_DataAlign = ADC_DataAlign_Right;
a.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
a.ADC_Mode = ADC_Mode_Independent;
a.ADC_NbrOfChannel = 1;
a.ADC_ScanConvMode = DISABLE; // 非扫描
ADC_Init(ADC1, &a);
ADC_Cmd(ADC1, ENABLE);
// 上电后校验
ADC_ResetCalibration(ADC1);
ADC_GetResetCalibrationStatus(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1)) ;
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1));
}
uint16_t AD_GetValue(uint8_t ADC_Channel)
{
ADC_RegularChannelConfig(ADC1, ADC_Channel, 1, ADC_SampleTime_55Cycles5); // 采样时间55.5个ADCCLK
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // 触发转换,连续转换只需要一次触发
while (ADC_GetFlagStatus(ADC1, ADC_FLAG_EOC) == RESET)
; // 为0表示转换未完成
return ADC_GetConversionValue(ADC1); // 读取数据寄存器
}
a.ADC_NbrOfChannel = 1。是每次触发转换后,转换的通道数,扫描模式下无用。
真多通道
要配合DMA,定义一个数组,通过DMA将ADC数据寄存器的数据转运到数组即可。文章来源:https://www.toymoban.com/news/detail-770283.html
代码
#include "stm32f10x.h" // Device header
uint16_t AD_Value[4];
void AD_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_ADC1, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
RCC_ADCCLKConfig(RCC_PCLK2_Div6); // 将apb2时钟6分频,72/16
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 | GPIO_Pin_3;
GPIO_Init(GPIOA, &GPIO_InitStructure);
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5); // 规则组序列配置
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_55Cycles5);
ADC_InitTypeDef a;
a.ADC_ContinuousConvMode = ENABLE; // disable表示单次转换,enable循环转换
a.ADC_DataAlign = ADC_DataAlign_Right;
a.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; // 不用外部触发
a.ADC_Mode = ADC_Mode_Independent;
a.ADC_NbrOfChannel = 4;
a.ADC_ScanConvMode = ENABLE; // 扫描模式
ADC_Init(ADC1, &a);
DMA_InitTypeDef d;
d.DMA_PeripheralBaseAddr = (uint32_t)&ADC1->DR; // adc1的数据寄存器
d.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord;
d.DMA_PeripheralInc = DMA_PeripheralInc_Disable; // 不自增,因为数据寄存器只有有一个,这个问题操
d.DMA_MemoryBaseAddr = (uint32_t)AD_Value;
d.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
d.DMA_MemoryInc = DMA_MemoryInc_Enable; // 数组地址自增
d.DMA_BufferSize = 4; // 传输计数器
d.DMA_DIR = DMA_DIR_PeripheralSRC; // 将外设设为数据源头()这里是adc_dr,src,resource
d.DMA_M2M = DMA_M2M_Disable; // 1软件触发,0硬件触发,这里是ADC触发
d.DMA_Mode = DMA_Mode_Circular; // normal不自动重装,即当传输计数器从4减到0,转运停止。这里是自动重装,即循环转运
d.DMA_Priority = DMA_Priority_Medium; // 优先级
DMA_Init(DMA1_Channel1, &d);
DMA_Cmd(DMA1_Channel1, ENABLE);
ADC_DMACmd(ADC1, ENABLE); // 这里没指定DMA1,为啥能将DMA1与ADC1联系起来呢,因为DMA1虽然有7通道,但是其余的时钟没开启,所以仲裁器根据优先级就知道了,只能是DMA1
ADC_Cmd(ADC1, ENABLE);
// 上电后校验
ADC_ResetCalibration(ADC1);
// ADC_GetResetCalibrationStatus(ADC1);
while (ADC_GetResetCalibrationStatus(ADC1) == SET)
;
ADC_StartCalibration(ADC1);
while (ADC_GetCalibrationStatus(ADC1) == SET)
;
ADC_SoftwareStartConvCmd(ADC1, ENABLE); // 触发转换,连续转换只需要一次触发
}
到了这里,关于ADC简介及代码示例的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!