分辨率和速率(FPS)

寄存器配置
I/O 板的驱动能力和方向控制


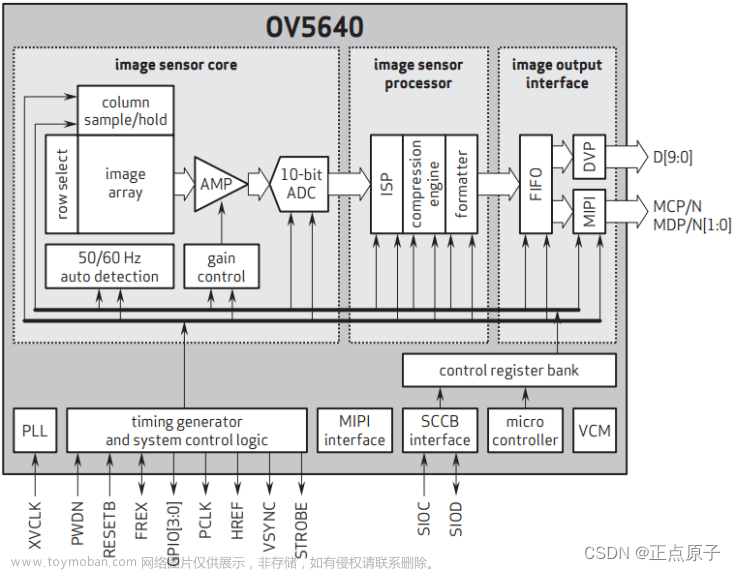
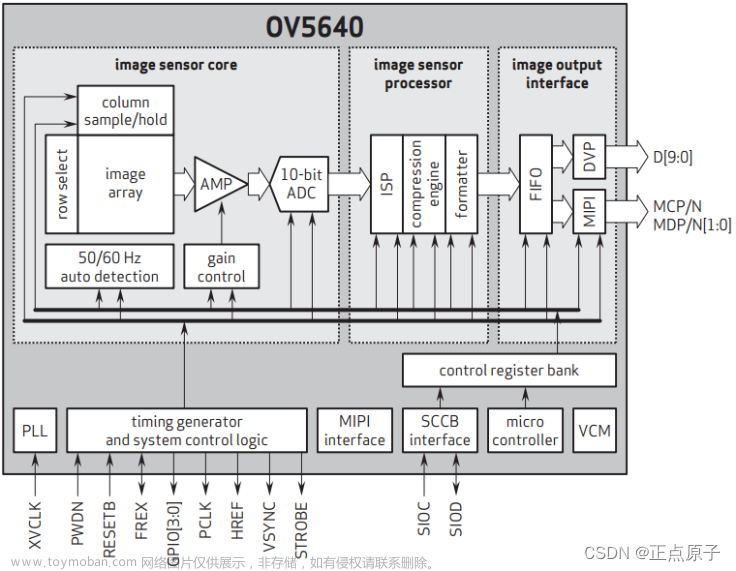
system clock control
OV5640 PLL 允许输入时钟频率范围为 6~27 MHz,最大 VCO 频率为 800 MHz。
MipiClk 用于 MIPI,SysClk 用于图像信号处理 (ISP) 模块的内部时钟。
可以通过将寄存器 0x3039[7] 设置为 1 来旁路 PLL。
SCCB 接口(IIC)
串行相机控制总线 (SCCB) 接口控制图像传感器操作。
有关串行控制端口的详细用法,请参阅 OmniVision Technologies 串行摄像机控制总线 (SCCB) 规范。
支持组写入,以便更新同一帧中的一组寄存器。这些寄存器保证在帧边界的内部锁存器之前被写入。
OV5640 最多支持四个组。这些组共享 1 KB RAM,并且每个组的大小可通过调整起始地址进行编程。
组保持起始地址范围为0x40~0x7F,单位为16字节。
IIC协议:
数据传输协议符合I2C标准。启动、重复启动和停止条件以及数据传输协议在 I2C 规范 [PHIL01] 中指定。
消息类型
基本 CCI 消息由 START 条件、带读/写位的从机地址、从机确认、指向从机设备内部寄存器的子地址(索引)、来自从机的确认信号、来自主机的写操作数据字节组成,来自从机的确认/否定确认和停止条件。在读操作中,数据字节来自从机,应答/否定应答来自主机。
图 3 对此进行了说明。
CCI 中的从机地址是 7 位。
CCI 支持 8 位索引和 8 位数据或 16 位索引和 8 位数据。所讨论的从设备定义了使用什么消息类型。
单字节地址和双字节地址(MIPI OV5640的地址为2字节地址)

SCCB ID

配置例程:DVP模式,代码来自正点原子
//****************************************Copyright (c)***********************************//
//原子哥在线教学平台:www.yuanzige.com
//技术支持:www.openedv.com
//淘宝店铺:http://openedv.taobao.com
//关注微信公众平台微信号:"正点原子",免费获取ZYNQ & FPGA & STM32 & LINUX资料。
//版权所有,盗版必究。
//Copyright(C) 正点原子 2018-2028
//All rights reserved
//----------------------------------------------------------------------------------------
// File name: i2c_ov5640_rgb565_cfg
// Last modified Date: 2020/05/04 9:19:08
// Last Version: V1.0
// Descriptions: iic配置
//
//----------------------------------------------------------------------------------------
// Created by: 正点原子
// Created date: 2019/05/04 9:19:08
// Version: V1.0
// Descriptions: The original version
//
//----------------------------------------------------------------------------------------
//****************************************************************************************//
module i2c_ov5640_rgb565_cfg
(
input clk , //时钟信号
input rst_n , //复位信号,低电平有效
input [7:0] i2c_data_r, //I2C读出的数据
input i2c_done , //I2C寄存器配置完成信号
input [12:0] cmos_h_pixel ,
input [12:0] cmos_v_pixel ,
input [12:0] total_h_pixel, //水平总像素大小
input [12:0] total_v_pixel, //垂直总像素大小
output reg i2c_exec , //I2C触发执行信号
output reg [23:0] i2c_data , //I2C要配置的地址与数据(高16位地址,低8位数据)
output reg i2c_rh_wl, //I2C读写控制信号
output reg init_done //初始化完成信号
);
//parameter define
localparam REG_NUM = 8'd250 ; //总共需要配置的寄存器个数
//reg define
reg [12:0] start_init_cnt; //等待延时计数器
reg [7:0] init_reg_cnt ; //寄存器配置个数计数器
//*****************************************************
//** main code
//*****************************************************
//clk时钟配置成250khz,周期为4us 5000*4us = 20ms
//OV5640上电到开始配置IIC至少等待20ms
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
start_init_cnt <= 13'b0;
else if(start_init_cnt < 13'd5000) begin
start_init_cnt <= start_init_cnt + 1'b1;
end
end
//寄存器配置个数计数
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
init_reg_cnt <= 8'd0;
else if(i2c_exec)
init_reg_cnt <= init_reg_cnt + 8'b1;
end
//i2c触发执行信号
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
i2c_exec <= 1'b0;
else if(start_init_cnt == 13'd4999)
i2c_exec <= 1'b1;
else if(i2c_done && (init_reg_cnt < REG_NUM))
i2c_exec <= 1'b1;
else
i2c_exec <= 1'b0;
end
//配置I2C读写控制信号
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
i2c_rh_wl <= 1'b1;
else if(init_reg_cnt == 8'd2)
i2c_rh_wl <= 1'b0;
end
//初始化完成信号
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
init_done <= 1'b0;
else if((init_reg_cnt == REG_NUM) && i2c_done)
init_done <= 1'b1;
end
//配置寄存器地址与数据
always @(posedge clk or negedge rst_n) begin
if(!rst_n)
i2c_data <= 24'b0;
else begin
case(init_reg_cnt)
//先对寄存器进行软件复位,使寄存器恢复初始值
//寄存器软件复位后,需要延时1ms才能配置其它寄存器
8'd0 : i2c_data <= {16'h300a,8'h0}; //
8'd1 : i2c_data <= {16'h300b,8'h0}; //
8'd2 : i2c_data <= {16'h3008,8'h82}; //Bit[7]:复位 Bit[6]:电源休眠
8'd3 : i2c_data <= {16'h3008,8'h02}; //正常工作模式
8'd4 : i2c_data <= {16'h3103,8'h02}; //Bit[1]:1 PLL Clock
//引脚输入/输出控制 FREX/VSYNC/HREF/PCLK/D[9:6]
8'd5 : i2c_data <= {8'h30,8'h17,8'hff};
//引脚输入/输出控制 D[5:0]/GPIO1/GPIO0
8'd6 : i2c_data <= {16'h3018,8'hff};
8'd7 : i2c_data <= {16'h3037,8'h13}; //PLL分频控制
8'd8 : i2c_data <= {16'h3108,8'h01}; //系统根分频器
8'd9 : i2c_data <= {16'h3630,8'h36};
8'd10 : i2c_data <= {16'h3631,8'h0e};
8'd11 : i2c_data <= {16'h3632,8'he2};
8'd12 : i2c_data <= {16'h3633,8'h12};
8'd13 : i2c_data <= {16'h3621,8'he0};
8'd14 : i2c_data <= {16'h3704,8'ha0};
8'd15 : i2c_data <= {16'h3703,8'h5a};
8'd16 : i2c_data <= {16'h3715,8'h78};
8'd17 : i2c_data <= {16'h3717,8'h01};
8'd18 : i2c_data <= {16'h370b,8'h60};
8'd19 : i2c_data <= {16'h3705,8'h1a};
8'd20 : i2c_data <= {16'h3905,8'h02};
8'd21 : i2c_data <= {16'h3906,8'h10};
8'd22 : i2c_data <= {16'h3901,8'h0a};
8'd23 : i2c_data <= {16'h3731,8'h12};
8'd24 : i2c_data <= {16'h3600,8'h08}; //VCM控制,用于自动聚焦
8'd25 : i2c_data <= {16'h3601,8'h33}; //VCM控制,用于自动聚焦
8'd26 : i2c_data <= {16'h302d,8'h60}; //系统控制
8'd27 : i2c_data <= {16'h3620,8'h52};
8'd28 : i2c_data <= {16'h371b,8'h20};
8'd29 : i2c_data <= {16'h471c,8'h50};
8'd30 : i2c_data <= {16'h3a13,8'h43}; //AEC(自动曝光控制)
8'd31 : i2c_data <= {16'h3a18,8'h00}; //AEC 增益上限
8'd32 : i2c_data <= {16'h3a19,8'hf8}; //AEC 增益上限
8'd33 : i2c_data <= {16'h3635,8'h13};
8'd34 : i2c_data <= {16'h3636,8'h03};
8'd35 : i2c_data <= {16'h3634,8'h40};
8'd36 : i2c_data <= {16'h3622,8'h01};
8'd37 : i2c_data <= {16'h3c01,8'h34};
8'd38 : i2c_data <= {16'h3c04,8'h28};
8'd39 : i2c_data <= {16'h3c05,8'h98};
8'd40 : i2c_data <= {16'h3c06,8'h00}; //light meter 1 阈值[15:8]
8'd41 : i2c_data <= {16'h3c07,8'h08}; //light meter 1 阈值[7:0]
8'd42 : i2c_data <= {16'h3c08,8'h00}; //light meter 2 阈值[15:8]
8'd43 : i2c_data <= {16'h3c09,8'h1c}; //light meter 2 阈值[7:0]
8'd44 : i2c_data <= {16'h3c0a,8'h9c}; //sample number[15:8]
8'd45 : i2c_data <= {16'h3c0b,8'h40}; //sample number[7:0]
8'd46 : i2c_data <= {16'h3810,8'h00}; //Timing Hoffset[11:8]
8'd47 : i2c_data <= {16'h3811,8'h10}; //Timing Hoffset[7:0]
8'd48 : i2c_data <= {16'h3812,8'h00}; //Timing Voffset[10:8]
8'd49 : i2c_data <= {16'h3708,8'h64};
8'd50 : i2c_data <= {16'h4001,8'h02}; //BLC(黑电平校准)补偿起始行号
8'd51 : i2c_data <= {16'h4005,8'h1a}; //BLC(黑电平校准)补偿始终更新
8'd52 : i2c_data <= {16'h3000,8'h00}; //系统块复位控制
8'd53 : i2c_data <= {16'h3004,8'hff}; //时钟使能控制
8'd54 : i2c_data <= {16'h4300,8'h61}; //格式控制 RGB565
8'd55 : i2c_data <= {16'h501f,8'h01}; //ISP RGB
8'd56 : i2c_data <= {16'h440e,8'h00};
8'd57 : i2c_data <= {16'h5000,8'ha7}; //ISP控制
8'd58 : i2c_data <= {16'h3a0f,8'h30}; //AEC控制;stable range in high
8'd59 : i2c_data <= {16'h3a10,8'h28}; //AEC控制;stable range in low
8'd60 : i2c_data <= {16'h3a1b,8'h30}; //AEC控制;stable range out high
8'd61 : i2c_data <= {16'h3a1e,8'h26}; //AEC控制;stable range out low
8'd62 : i2c_data <= {16'h3a11,8'h60}; //AEC控制; fast zone high
8'd63 : i2c_data <= {16'h3a1f,8'h14}; //AEC控制; fast zone low
//LENC(镜头校正)控制 16'h5800~16'h583d
8'd64 : i2c_data <= {16'h5800,8'h23};
8'd65 : i2c_data <= {16'h5801,8'h14};
8'd66 : i2c_data <= {16'h5802,8'h0f};
8'd67 : i2c_data <= {16'h5803,8'h0f};
8'd68 : i2c_data <= {16'h5804,8'h12};
8'd69 : i2c_data <= {16'h5805,8'h26};
8'd70 : i2c_data <= {16'h5806,8'h0c};
8'd71 : i2c_data <= {16'h5807,8'h08};
8'd72 : i2c_data <= {16'h5808,8'h05};
8'd73 : i2c_data <= {16'h5809,8'h05};
8'd74 : i2c_data <= {16'h580a,8'h08};
8'd75 : i2c_data <= {16'h580b,8'h0d};
8'd76 : i2c_data <= {16'h580c,8'h08};
8'd77 : i2c_data <= {16'h580d,8'h03};
8'd78 : i2c_data <= {16'h580e,8'h00};
8'd79 : i2c_data <= {16'h580f,8'h00};
8'd80 : i2c_data <= {16'h5810,8'h03};
8'd81 : i2c_data <= {16'h5811,8'h09};
8'd82 : i2c_data <= {16'h5812,8'h07};
8'd83 : i2c_data <= {16'h5813,8'h03};
8'd84 : i2c_data <= {16'h5814,8'h00};
8'd85 : i2c_data <= {16'h5815,8'h01};
8'd86 : i2c_data <= {16'h5816,8'h03};
8'd87 : i2c_data <= {16'h5817,8'h08};
8'd88 : i2c_data <= {16'h5818,8'h0d};
8'd89 : i2c_data <= {16'h5819,8'h08};
8'd90 : i2c_data <= {16'h581a,8'h05};
8'd91 : i2c_data <= {16'h581b,8'h06};
8'd92 : i2c_data <= {16'h581c,8'h08};
8'd93 : i2c_data <= {16'h581d,8'h0e};
8'd94 : i2c_data <= {16'h581e,8'h29};
8'd95 : i2c_data <= {16'h581f,8'h17};
8'd96 : i2c_data <= {16'h5820,8'h11};
8'd97 : i2c_data <= {16'h5821,8'h11};
8'd98 : i2c_data <= {16'h5822,8'h15};
8'd99 : i2c_data <= {16'h5823,8'h28};
8'd100: i2c_data <= {16'h5824,8'h46};
8'd101: i2c_data <= {16'h5825,8'h26};
8'd102: i2c_data <= {16'h5826,8'h08};
8'd103: i2c_data <= {16'h5827,8'h26};
8'd104: i2c_data <= {16'h5828,8'h64};
8'd105: i2c_data <= {16'h5829,8'h26};
8'd106: i2c_data <= {16'h582a,8'h24};
8'd107: i2c_data <= {16'h582b,8'h22};
8'd108: i2c_data <= {16'h582c,8'h24};
8'd109: i2c_data <= {16'h582d,8'h24};
8'd110: i2c_data <= {16'h582e,8'h06};
8'd111: i2c_data <= {16'h582f,8'h22};
8'd112: i2c_data <= {16'h5830,8'h40};
8'd113: i2c_data <= {16'h5831,8'h42};
8'd114: i2c_data <= {16'h5832,8'h24};
8'd115: i2c_data <= {16'h5833,8'h26};
8'd116: i2c_data <= {16'h5834,8'h24};
8'd117: i2c_data <= {16'h5835,8'h22};
8'd118: i2c_data <= {16'h5836,8'h22};
8'd119: i2c_data <= {16'h5837,8'h26};
8'd120: i2c_data <= {16'h5838,8'h44};
8'd121: i2c_data <= {16'h5839,8'h24};
8'd122: i2c_data <= {16'h583a,8'h26};
8'd123: i2c_data <= {16'h583b,8'h28};
8'd124: i2c_data <= {16'h583c,8'h42};
8'd125: i2c_data <= {16'h583d,8'hce};
//AWB(自动白平衡控制) 16'h5180~16'h519e
8'd126: i2c_data <= {16'h5180,8'hff};
8'd127: i2c_data <= {16'h5181,8'hf2};
8'd128: i2c_data <= {16'h5182,8'h00};
8'd129: i2c_data <= {16'h5183,8'h14};
8'd130: i2c_data <= {16'h5184,8'h25};
8'd131: i2c_data <= {16'h5185,8'h24};
8'd132: i2c_data <= {16'h5186,8'h09};
8'd133: i2c_data <= {16'h5187,8'h09};
8'd134: i2c_data <= {16'h5188,8'h09};
8'd135: i2c_data <= {16'h5189,8'h75};
8'd136: i2c_data <= {16'h518a,8'h54};
8'd137: i2c_data <= {16'h518b,8'he0};
8'd138: i2c_data <= {16'h518c,8'hb2};
8'd139: i2c_data <= {16'h518d,8'h42};
8'd140: i2c_data <= {16'h518e,8'h3d};
8'd141: i2c_data <= {16'h518f,8'h56};
8'd142: i2c_data <= {16'h5190,8'h46};
8'd143: i2c_data <= {16'h5191,8'hf8};
8'd144: i2c_data <= {16'h5192,8'h04};
8'd145: i2c_data <= {16'h5193,8'h70};
8'd146: i2c_data <= {16'h5194,8'hf0};
8'd147: i2c_data <= {16'h5195,8'hf0};
8'd148: i2c_data <= {16'h5196,8'h03};
8'd149: i2c_data <= {16'h5197,8'h01};
8'd150: i2c_data <= {16'h5198,8'h04};
8'd151: i2c_data <= {16'h5199,8'h12};
8'd152: i2c_data <= {16'h519a,8'h04};
8'd153: i2c_data <= {16'h519b,8'h00};
8'd154: i2c_data <= {16'h519c,8'h06};
8'd155: i2c_data <= {16'h519d,8'h82};
8'd156: i2c_data <= {16'h519e,8'h38};
//Gamma(伽马)控制 16'h5480~16'h5490
8'd157: i2c_data <= {16'h5480,8'h01};
8'd158: i2c_data <= {16'h5481,8'h08};
8'd159: i2c_data <= {16'h5482,8'h14};
8'd160: i2c_data <= {16'h5483,8'h28};
8'd161: i2c_data <= {16'h5484,8'h51};
8'd162: i2c_data <= {16'h5485,8'h65};
8'd163: i2c_data <= {16'h5486,8'h71};
8'd164: i2c_data <= {16'h5487,8'h7d};
8'd165: i2c_data <= {16'h5488,8'h87};
8'd166: i2c_data <= {16'h5489,8'h91};
8'd167: i2c_data <= {16'h548a,8'h9a};
8'd168: i2c_data <= {16'h548b,8'haa};
8'd169: i2c_data <= {16'h548c,8'hb8};
8'd170: i2c_data <= {16'h548d,8'hcd};
8'd171: i2c_data <= {16'h548e,8'hdd};
8'd172: i2c_data <= {16'h548f,8'hea};
8'd173: i2c_data <= {16'h5490,8'h1d};
//CMX(彩色矩阵控制) 16'h5381~16'h538b
8'd174: i2c_data <= {16'h5381,8'h1e};
8'd175: i2c_data <= {16'h5382,8'h5b};
8'd176: i2c_data <= {16'h5383,8'h08};
8'd177: i2c_data <= {16'h5384,8'h0a};
8'd178: i2c_data <= {16'h5385,8'h7e};
8'd179: i2c_data <= {16'h5386,8'h88};
8'd180: i2c_data <= {16'h5387,8'h7c};
8'd181: i2c_data <= {16'h5388,8'h6c};
8'd182: i2c_data <= {16'h5389,8'h10};
8'd183: i2c_data <= {16'h538a,8'h01};
8'd184: i2c_data <= {16'h538b,8'h98};
//SDE(特殊数码效果)控制 16'h5580~16'h558b
8'd185: i2c_data <= {16'h5580,8'h06};
8'd186: i2c_data <= {16'h5583,8'h40};
8'd187: i2c_data <= {16'h5584,8'h10};
8'd188: i2c_data <= {16'h5589,8'h10};
8'd189: i2c_data <= {16'h558a,8'h00};
8'd190: i2c_data <= {16'h558b,8'hf8};
8'd191: i2c_data <= {16'h501d,8'h40}; //ISP MISC
//CIP(颜色插值)控制 (16'h5300~16'h530c)
8'd192: i2c_data <= {16'h5300,8'h08};
8'd193: i2c_data <= {16'h5301,8'h30};
8'd194: i2c_data <= {16'h5302,8'h10};
8'd195: i2c_data <= {16'h5303,8'h00};
8'd196: i2c_data <= {16'h5304,8'h08};
8'd197: i2c_data <= {16'h5305,8'h30};
8'd198: i2c_data <= {16'h5306,8'h08};
8'd199: i2c_data <= {16'h5307,8'h16};
8'd200: i2c_data <= {16'h5309,8'h08};
8'd201: i2c_data <= {16'h530a,8'h30};
8'd202: i2c_data <= {16'h530b,8'h04};
8'd203: i2c_data <= {16'h530c,8'h06};
8'd204: i2c_data <= {16'h5025,8'h00};
//系统时钟分频 Bit[7:4]:系统时钟分频 input clock =24Mhz, PCLK = 48Mhz
8'd205: i2c_data <= {16'h3035,8'h11};
8'd206: i2c_data <= {16'h3036,8'h3c}; //PLL倍频
8'd207: i2c_data <= {16'h3c07,8'h08};
//时序控制 16'h3800~16'h3821
8'd208: i2c_data <= {16'h3820,8'h46};
8'd209: i2c_data <= {16'h3821,8'h01};
8'd210: i2c_data <= {16'h3814,8'h31};
8'd211: i2c_data <= {16'h3815,8'h31};
8'd212: i2c_data <= {16'h3800,8'h00};
8'd213: i2c_data <= {16'h3801,8'h00};
8'd214: i2c_data <= {16'h3802,8'h00};
8'd215: i2c_data <= {16'h3803,8'h04};
8'd216: i2c_data <= {16'h3804,8'h0a};
8'd217: i2c_data <= {16'h3805,8'h3f};
8'd218: i2c_data <= {16'h3806,8'h07};
8'd219: i2c_data <= {16'h3807,8'h9b};
//设置输出像素个数
//DVP 输出水平像素点数高4位
8'd220: i2c_data <= {16'h3808,{4'd0,cmos_h_pixel[11:8]}};
//DVP 输出水平像素点数低8位
8'd221: i2c_data <= {16'h3809,cmos_h_pixel[7:0]};
//DVP 输出垂直像素点数高3位
8'd222: i2c_data <= {16'h380a,{5'd0,cmos_v_pixel[10:8]}};
//DVP 输出垂直像素点数低8位
8'd223: i2c_data <= {16'h380b,cmos_v_pixel[7:0]};
//水平总像素大小高5位
8'd224: i2c_data <= {16'h380c,{3'd0,total_h_pixel[12:8]}};
//水平总像素大小低8位
8'd225: i2c_data <= {16'h380d,total_h_pixel[7:0]};
//垂直总像素大小高5位
8'd226: i2c_data <= {16'h380e,{3'd0,total_v_pixel[12:8]}};
//垂直总像素大小低8位
8'd227: i2c_data <= {16'h380f,total_v_pixel[7:0]};
8'd228: i2c_data <= {16'h3813,8'h06};
8'd229: i2c_data <= {16'h3618,8'h00};
8'd230: i2c_data <= {16'h3612,8'h29};
8'd231: i2c_data <= {16'h3709,8'h52};
8'd232: i2c_data <= {16'h370c,8'h03};
8'd233: i2c_data <= {16'h3a02,8'h17}; //60Hz max exposure
8'd234: i2c_data <= {16'h3a03,8'h10}; //60Hz max exposure
8'd235: i2c_data <= {16'h3a14,8'h17}; //50Hz max exposure
8'd236: i2c_data <= {16'h3a15,8'h10}; //50Hz max exposure
8'd237: i2c_data <= {16'h4004,8'h02}; //BLC(背光) 2 lines
8'd238: i2c_data <= {16'h4713,8'h03}; //JPEG mode 3
8'd239: i2c_data <= {16'h4407,8'h04}; //量化标度
8'd240: i2c_data <= {16'h460c,8'h22};
8'd241: i2c_data <= {16'h4837,8'h22}; //DVP CLK divider
8'd242: i2c_data <= {16'h3824,8'h02}; //DVP CLK divider
8'd243: i2c_data <= {16'h5001,8'ha3}; //ISP 控制
8'd244: i2c_data <= {16'h3b07,8'h0a}; //帧曝光模式
//彩条测试使能
8'd245: i2c_data <= {16'h503d,8'h00}; //8'h00:正常模式 8'h80:彩条显示
//测试闪光灯功能
8'd246: i2c_data <= {16'h3016,8'h02};
8'd247: i2c_data <= {16'h301c,8'h02};
8'd248: i2c_data <= {16'h3019,8'h02}; //打开闪光灯
8'd249: i2c_data <= {16'h3019,8'h00}; //关闭闪光灯
//只读存储器,防止在case中没有列举的情况,之前的寄存器被重复改写
default : i2c_data <= {16'h300a,8'h00}; //器件ID高8位
endcase
end
end
endmodule配置仅提供标题,自己查起来比较方便
输出格式:format description


ISP format应该要对齐吧?
重要:分辨率

 文章来源:https://www.toymoban.com/news/detail-770656.html
文章来源:https://www.toymoban.com/news/detail-770656.html
 文章来源地址https://www.toymoban.com/news/detail-770656.html
文章来源地址https://www.toymoban.com/news/detail-770656.html
到了这里,关于OV5640 自用资料的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!