- 设置观看视角
- 逐点上色
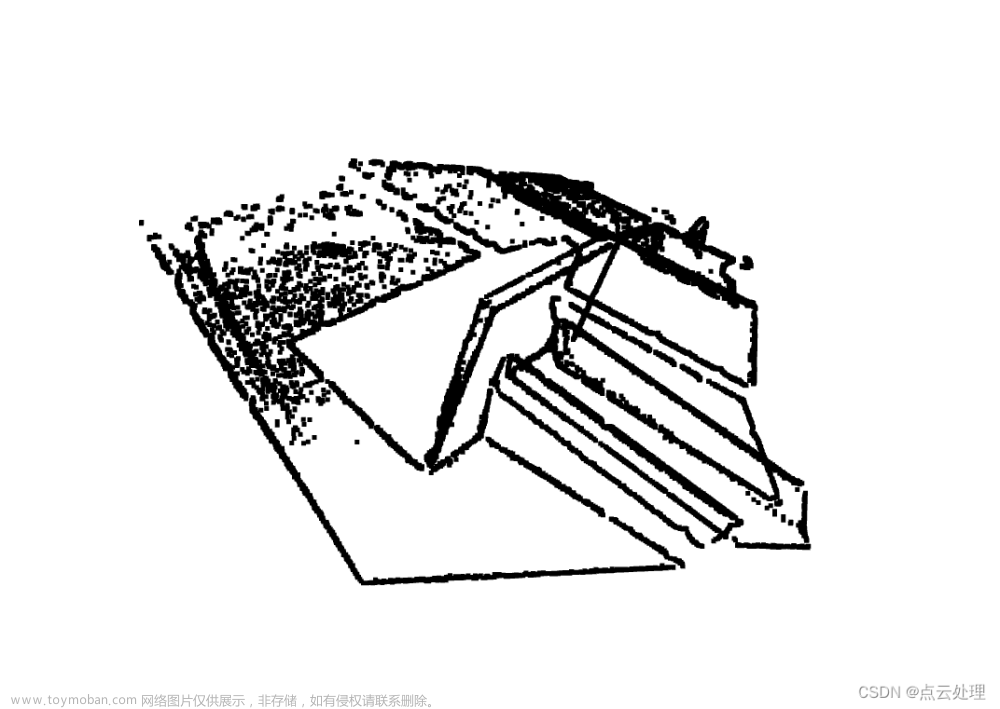
- 可视化连续点云帧
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import os
import open3d as o3d
import numpy as np
import time
def save_view_point(pcd_numpy, filename):
vis = o3d.visualization.Visualizer()
vis.create_window()
pcd = o3d.open3d.geometry.PointCloud()
pcd.points= o3d.open3d.utility.Vector3dVector(pcd_numpy)
vis.add_geometry(pcd)
axis = o3d.geometry.TriangleMesh.create_coordinate_frame(size=1, origin=[0, 0, 0])
vis.add_geometry(axis)
vis.run() # user changes the view and press "q" to terminate
param = vis.get_view_control().convert_to_pinhole_camera_parameters()
o3d.io.write_pinhole_camera_parameters(filename, param)
vis.destroy_window()
def draw_color(color_h,color_l,pcd):
color_h = np.array(color_h,np.float32).reshape(1,3)
color_l = np.array(color_l,np.float32).reshape(1,3)
raw_points = np.array(pcd.points).copy()
hight = raw_points[:,2:]
hight = np.clip(hight, -3, 1)
colors = color_l + (hight - (-3)) * (color_h - color_l)/4.0
pcd.colors = o3d.utility.Vector3dVector(colors)
return pcd
def vis_cons(files_dir,vis_detect_result=False):
files = os.listdir(files_dir)
pcds = []
for f in files:
pcd_path = os.path.join(files_dir,f)
pcd=o3d.open3d.geometry.PointCloud()#创建点云对象
raw_point = np.fromfile(pcd_path, dtype=np.float32).reshape(-1, 4)[:,:3]
pcd.points= o3d.open3d.utility.Vector3dVector(raw_point)#将点云数据转换为Open3d可以直接使用的数据类型
pcd = draw_color([1.0,0.36,0.2],[1.0,0.96,0.2],pcd)
pcds.append(pcd)
#if vis_detect_result:
# batch_results = np.load('batch_results.npy',allow_pickle=True)
vis = o3d.visualization.Visualizer()
vis.create_window()
opt = vis.get_render_option()
opt.background_color = np.asarray([0, 0, 0])
opt.point_size = 1
opt.show_coordinate_frame = False
if os.path.exists("viewpoint.json"):
ctr = vis.get_view_control()
param = o3d.io.read_pinhole_camera_parameters("viewpoint.json")
ctr.convert_from_pinhole_camera_parameters(param)
for i in range(len(pcds)):
vis.clear_geometries()
axis = o3d.geometry.TriangleMesh.create_coordinate_frame(size=1, origin=[0, 0, 0])
vis.add_geometry(axis)
vis.add_geometry(pcds[i])
ctr.convert_from_pinhole_camera_parameters(param)
time.sleep(0.1)
vis.run()
vis.destroy_window()
if __name__ == '__main__':
exp_pcd_file=r"F:\Datasets\PointCloud\KITTI_track\KITTI_tracking\training\velodyne\0001"
view_pcd = np.fromfile(os.path.join(exp_pcd_file,'000000.bin'), dtype=np.float32).reshape(-1, 4)[:,:3]
save_view_point(view_pcd, "viewpoint.json")
vis_cons(exp_pcd_file)
文章来源地址https://www.toymoban.com/news/detail-771421.html
文章来源:https://www.toymoban.com/news/detail-771421.html
到了这里,关于Open3D可视化连续点云帧(From KITTI tracking dataset)的文章就介绍完了。如果您还想了解更多内容,请在右上角搜索TOY模板网以前的文章或继续浏览下面的相关文章,希望大家以后多多支持TOY模板网!